







前言
本节主要分析吴恩达教授授课过程中的课后练习题计算过程,通过习题进一步复习巩固前边所学知识。
1、课后习题:ex1
下载地址:https://pan.baidu.com/s/158L1eMLSlkWUYvHe_9iVQw
提取码:xodk
2、使用工具:Octave 6.1.0,官网:https://wiki.octave.org/GNU_Octave_Wiki
该版本下载地址:https://www.gnu.org/software/octave/download

习题简述
ex1习题主要包含3部分内容的练习,单变量线性回归、多变量线性回归以及正规方程的基本使用流程。首先对ex1文件夹下的文件有个基本的认识和了解:图中未标记的文件主要用于代码提交,可以不关注。

训练的目的主要有两点:
(1)熟练掌握所学算法的具体流程,并能通过代码的方式实现;
(2)掌握Octave基本语法,能通过Octave的方式进行代码实现。此处默认大家都对Octave有了基本的了解,Octave类似与Matlab。
m文件在Octave/Matlab中分为两种,函数文件或者脚本文件。
一种为脚本文件,就是由一堆命令构成的,里面第一行不是 function 开头,这种文件比如是myfun.m 就在命令窗口里输入myfun回车就行,matlab会把m文件中的命令都运行一次。
另一种为函数文件,第一行为function ,比如说 function y=myfun(x),这种文件函数名与文件名必须是一致的,在命令窗口里输入myfun(x), x是运行参数,回车即运行。
热身训练:输出一个5*5的单位矩阵。
方法一:直接输出;
eye(5)

方法二:通过函数文件实现;
pwd %显示当前所在路径
cd 'G:\Desktop\machinelearning\Ngex1\ex1' %进入项目路径
%addpath('G:\Desktop\machinelearning\Ngex1\ex1') %也可通过添加路径的方式
warmUpExercise

单变量线性回归
问题背景:假如你是餐馆老板,已知若干城市中人口和利润的数据(ex1data1.txt),用线性回归方法计算该去哪个城市发展。
综述
直接运行脚本文件ex1.m,即可得到整个单变量线性回归的结果。方法很简单,只需要在Octave命令行中键入ex1即可。
pwd %查看当前路径,保证路径正确,或者在此之前已经添加过项目路径。
ex1 %执行ex1.m脚本
接下来只需要按照提示敲回车即可看到最终预测结果。

分解步骤
至于脚本和函数的实现方式,不再细讲,代码中有很清晰的注释,大家可以自行查看。接下来咱们不调用脚本,通过Octave自行实现本题,其实就是脚本流程的复现过程。
1、首先回顾一下单变量线性回归的流程
①根据数据选取合适的模型,此处选用单变量线性回归模型,即
②代价函数计算: 如何通过代码实现计算代价函数。
③梯度计算:如何通过代码计算梯度,实现
θ
\theta
θ的同步更新。
参数更新方式:

求导结果:
x
0
=
1
x_{0} = 1
x0=1,因为
θ
0
\theta_{0}
θ0的系数为1,其实就相当于
x
0
x_{0}
x0恒为1。推导过程之前总结过。

2、基本知识点回顾完毕,接下来开始构思怎么得到该模型的最优参数,也就是得到最终的预测函数。首先明确我们的目标,求出最优的参数
θ
0
和
θ
1
\theta_{0}和\theta_{1}
θ0和θ1。
然后,考虑该怎么求解?其实就是通过代价函数一步一步迭代,当代价函数值最小时,即得到最优参数。最后,怎么迭代?
θ
\theta
θ值的组合有很多种,需要有一种算法来帮助我们迭代。梯度下降算法就是帮助我们进行迭代更新参数的。
代码实现
step1:首先加载数据,观察数据分布情况。
%加载数据前,请先保证当前路径
pwd %查看路径
data = load('ex1data1.txt'); %加分号不会显示详细结果,不加分号会显示结果
data %查看加载的数据,第一列表示城市人口,第二列表示利润
x = data(:,1); %x为第一列所有数据,冒号表示取行的所有,1表示第1列
y = data(:,2); %y为第二列所有数据
plot(x,y,'xr'); %显示关于x,y的图像,xr表示以‘x’的方式红色输出
xlabel('Population of City in 10,000s'); %x轴标签
ylabel('Profit in $10,000s'); %y轴标签


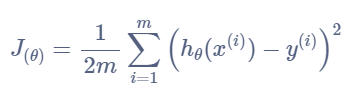
step2:观察图像,我们选择单变量线性回归模型来预测。首先熟悉一下代价函数的计算。当我们有两个值
θ
0
和
θ
1
\theta_{0}和\theta_{1}
θ0和θ1的时候,如何计算此时的代价函数,根据公式:
J
(
θ
)
=
1
2
m
∑
i
=
1
m
(
h
θ
(
x
(
i
)
)
−
y
(
i
)
)
2
J_{\left(\theta\right)}=\frac{1}{2 m} \sum_{i=1}^{m}\left(h_{\theta}(x^{(i)})-y^{(i)}\right)^{2}
J(θ)=2m1∑i=1m(hθ(x(i))−y(i))2。
计算过程:假设只取前3(m = 3)行数据进行代价函数的计算,计算方式如下表所示。首先我们需要一个初始
θ
0
和
θ
1
\theta_{0}和\theta_{1}
θ0和θ1的值,此处设定初始值为
θ
0
=
2
,
θ
1
=
3
\theta_{0} = 2,\theta_{1} = 3
θ0=2,θ1=3,此时计算的代价函数结果为
J
=
48.32
J = 48.32
J=48.32。

Octave的实现需要借助矩阵相关知识。因为使用矩阵不仅可以简化代码,而且可以提高运算效率。当然这个流程你也可以使用类似
f
o
r
for
for循环的方式实现,但是不建议这么做。
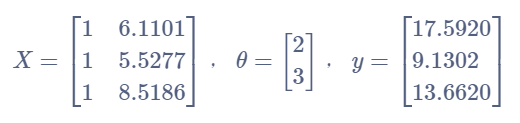
至此,每个矩阵都已经构建完毕,
X
X
X第一列为什么都是1,熟悉矩阵操作的朋友都明白,因为它永远和
θ
\theta
θ矩阵中的第一行相乘,即公式中的
θ
0
\theta_{0}
θ0。
所以代价函数可以用矩阵的形式表示为:
J
(
θ
)
=
1
2
m
∑
i
=
1
m
(
X
∗
θ
−
y
)
2
J_{(\theta)} = \frac{1}{2 m} \sum_{i=1}^{m}\left(X*\theta-y\right)^{2}
J(θ)=2m1i=1∑m(X∗θ−y)2
%该部分代码是在之前代码的基础上,此时已经得到了x和y的对应数据
%首先构建矩阵x,因为之前得到的矩阵x只有1列,需要在其左边再加1列1
m = length(y); %首先获取有多少行数据
x = [ones(m,1) x]; %在x之前加一列1,也可写成[ones(m,1) data(:,1)]。
%y = data(:,2); %在此之前已经获得,可省略
theta = [2;3] %设定theta的值,该矩阵为2行1列
J = 0;
J = sum((x * theta - y).^2) / (2 * m); %代价函数表示

step3:运用梯度下降算法计算最优参数。注意:参数需要同步更新。
θ
j
:
=
θ
j
−
α
1
m
∑
i
=
1
m
(
h
θ
(
x
(
i
)
)
−
y
(
i
)
)
x
j
(
i
)
,
(
j
=
0
,
1
)
\theta_{j}:=\theta_{j}-\alpha \frac{1}{m} \sum_{i=1}^{m}\left(h_{\theta}\left(x^{(i)}\right)-y^{(i)}\right) x_{j}^{(i)},(j=0,1)
θj:=θj−αm1i=1∑m(hθ(x(i))−y(i))xj(i),(j=0,1)前边已经说过,用矩阵表示
h
(
x
)
=
x
∗
t
h
e
t
a
h_{(x)} = x * theta
h(x)=x∗theta,还是取前3行数据进行说明:
重点说明一下后边的
x
j
(
i
)
x_{j}^{(i)}
xj(i),此处的乘为点乘,即对应位相乘,当
j
=
0
j = 0
j=0时,即求取
θ
0
\theta_{0}
θ0的值,那么此时
x
0
(
i
)
x_{0}^{(i)}
x0(i)就表示取矩阵
x
x
x中的第0列所有数据。
因为在Octave中矩阵下标都是从1开始的,所以第0列其实就是第1列,第1列就是第2列。所以公式和实际的代码还是有点区别的。

%在此之前保证已经构建好x和y矩阵
%定义初始alpha、迭代次数、theta值
alpha = 0.01; %表示步长、学习率
iterations = 1500; %表示迭代循环1500次
theta = zeros(2,1); %theta0和theta1均为0
%下边开始进行迭代
J_history = zeros(iterations ,1); %将代价函数结果为矩阵,可以看出为1500行1列
theta_s = theta; %拷贝theta初始值
for iter = 1 : iterations
theta(1) = theta(1) - alpha / m * sum((x * theta_s - y).*x(:,1));
theta(2) = theta(2) - alpha / m * sum((x * theta_s - y).*(x:,2));
theta_s = theta;
J_history(iter) = sum((x * theta - y).^2) / (2 * m); %代价函数结果
end



至此,1500次迭代已经结束,损失函数值从32.072将为4.4834。最终预测的
θ
0
=
−
3.6298
,
θ
1
=
1.1663
\theta_{0} = -3.6298,\theta_{1} = 1.1663
θ0=−3.6298,θ1=1.1663。
step4:画出预测结果图像。三维图像参考ex1.m文件,此处省略。
hold on;
plot(x(:,2),x*theta,'-'); %以划线的方式画出预测模型

多变量线性回归
问题背景:买房子,已知一系列数据,根据房屋大小和卧室数量两个特征,预测房子价格,数据在(ex1data2.txt)中。
说明:单变量线性回归其实是多变量线性回归的一种特殊情况,大体思路其实是一样的。主要在于梯度下降算法,因为单变量线性回归只有两个
θ
\theta
θ值,所以在循环中可以写成
θ
1
=
.
.
.
.
;
θ
2
=
.
.
.
.
;
\theta_{1} = ....; \theta_{2} = ....;
θ1=....;θ2=....;。当随着特征增多时,假设有100个特征,那么此时我们就有101个
θ
\theta
θ值,再像这样列举就会很繁琐。所以我们得找到一个通用的表示方法来简化此步骤。

假设
x
x
x为3*3矩阵,
θ
\theta
θ为3 * 1矩阵,
y
y
y为3 * 1矩阵。那么式中
(
x
∗
t
h
e
t
a
−
y
)
(x * theta - y)
(x∗theta−y)为3 * 1矩阵。此时要给每一项都要乘以对应列的
x
x
x。我们将
x
x
x进行转置。那么
x
x
x就变为:

此时用
x
⊤
∗
(
x
∗
θ
−
y
)
x^{\top}* (x * \theta - y)
x⊤∗(x∗θ−y),即就是求和所得结果。所以最终梯度下降算法可表示为,注意此处的
θ
\theta
θ为矩阵,而不再是单独的值:
θ
:
=
θ
−
α
1
m
X
⊤
(
x
θ
−
y
)
\theta:=\theta-\alpha \frac{1}{m} X^{\top}(x \theta-y)
θ:=θ−αm1X⊤(xθ−y)
注意:查看数据我们可以发现,特征值的范围相差很大,房屋大小基本都在1000以上,而卧室基本都在10以内。此时为了更快的拟合数据,我们需要进行特征缩放。
特征缩放的目的是保证每个特征基本都在-1 <
x
x
x < 1之间,当然,接近这个范围就可以,没必要必须在这个范围之间。
z = x − μ σ z=\frac{x-\mu}{\sigma} z=σx−μ
其中 x x x表示当前特征值, μ \mu μ表示该平均数(房屋大小的平均值), σ \sigma σ表示标准偏差(也可以用房屋大小中最大值-最小值)。
data = load('ex1data2.txt'); %加载数据
y = data(:,3); %y为数据第3列
m = length(y); %得到样本数量
x = [ones(m,1) data(:,1:2)]; %得到x矩阵
%特征缩放
mu = mean(x);
sigma = std(x);
%x_norm = (x - mu) ./ sigma; %这个写法其实不对,因为mu最终为3行1列,而x为47行3列,应使用下边的方法,将mu和sigma转换为47行3列。但是Octave也可正确计算该式。
x_norm = (x - repmat(mu,size(x,1),1)) ./ repmat(sigma,size(x,1),1);
%定义初始alpha、迭代次数、theta值
alpha = 0.01; %表示步长、学习率
iterations = 8500; %表示迭代循环8500次
theta = zeros(3,1); %theta0和theta1和theta2均为0
%下边开始进行迭代
J_history = zeros(iterations ,1); %将代价函数结果为矩阵,可以看出为1500行1列
for iter = 1 : iterations
theta = theta - alpha / m * x_norm ' * (x_norm * theta - y); %得到theta矩阵
J_history(iter) = sum((x_norm * theta - y).^2) / (2 * m); %代价函数结果
end
%后期在预测过程中,给出的特征值都需要按照同样的特征缩放方式进行缩放。
%具体参考ex1_multi.m


正规方程
该方法适用于样本较少的情况,如果样本太多,那么正规方程就会特别慢。它不需要通过迭代计算最优参数,可直接得到最优 θ \theta θ值,而且不需要进行特征缩放。
θ = ( X T X ) − 1 X T y \theta=\left(X^{T} X\right)^{-1} X^{T} y θ=(XTX)−1XTy
theta = pinv(x' * x) * x' * y; %pinv表示逆运算,'表示转置运算。















 3384
3384











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









