









 探讨了机械臂连杆长度对工作空间及操控灵活性的影响,通过MATLAB代码实现不同参数下的工作空间体积与操作度计算,为机械臂构型设计提供优化依据。
探讨了机械臂连杆长度对工作空间及操控灵活性的影响,通过MATLAB代码实现不同参数下的工作空间体积与操作度计算,为机械臂构型设计提供优化依据。
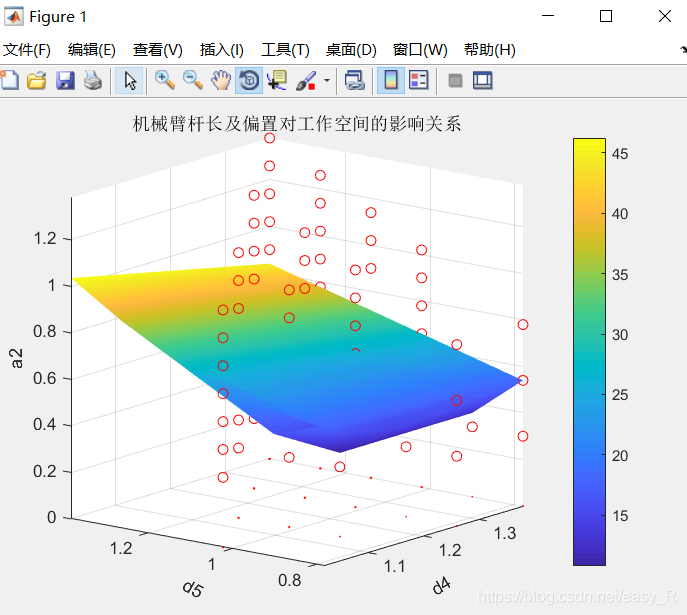
机器人工作空间收到机械臂连杆长度的影响,而工作空间的大小与机械臂的操控灵活性又非正相关。基于优化理论,考虑不同杆长因素对工作空间和操控灵活性之间的关系。为构型的设计提供一定参考依据。文章初步实现这一思想,后续进行继续改进优化。
matlab代码:
clc;clear all;
d4min=0.3; d4max=1.5; d4Num=10;
d5min=0.3; d5max=1.5; d5Num=10;
a2min=0.3; a2max=1.5; a2Num=10;
deltad4=(d4max-d4min)/d4Num;
deltad5=(d5max-d5min)/d5Num;
deltaa2=(a2max-a2min)/a2Num;
[d4]=d4min:deltad4:d4max;
[d5]=d5min:deltad5:d5max;
[a2]=a2min:deltaa2:a2max;
for i=1:1:d4Num
for j=1:1:d5Num
for k=1:1:a2Num
[v,m]=myVolum(d4(i),d5(j),a2(k));
if v==0||m==0
break ;
end
Resu(i*j*k,:)=[v,m,d4(i),d5(j),a2(k)];
end
end
end
Resu(all(Resu==0,2),:)=[]; %去除全为零的行
fprintf('输出计算结果:\r\n')
fprintf('------------------------------------\r\n Volum m d4 d5 a2')
Resu
%%
function [v,m]=myVolum(d4,d5,a2)
d1=0;d2=0;d3=0;d6=0;
% d4=0.5;d5=1;
% a2=.5;
a3=0;a4=0;
d=[d1,d2,d3,d4,d5,d6];
a=[0,0,a2,a3,a4,0];
alp=[0,pi/2,0,pi/2,pi/2,-pi/2];
q=[0,0,0,pi/2,0,0];
% theta d a alpha offset
L1=Link([0 d(1) a(1) alp(1) 0 ],'modified');
L2=Link([0 d(2) a(2) alp(2) 0 ],'modified');
L3=Link([0 d(3) a(3) alp(3) 0 ],'modified');
L4=Link([0 d(4) a(4) alp(4) 0 ],'modified');
L5=Link([0 d(5) a(5) alp(5) 0 ],'modified');
L6=Link([0 d(6) a(6) alp(6) 0 ],'modified');
myrobot=SerialLink([L1 L2 L3 L4 L5 L6],'name','modified-6R');
% figure(1)
% myrobot.plot(q);
% myrobot.teach();hold on;
m=myrobot.maniplty(q,'yoshikawa');
% J=myrobot.jacob0(q);J=J(1:3,:); plot_ellipse(J*J'); %operateablity ellipse
if m<0.5 v=0; %对于操作度小于0.5的直接舍去工作空间的计算
return ;
end
la=[-pi/2,pi/2];
lb=[0, pi];
lc=[0, pi];
ld=[0, pi];
le=[-pi, pi];
lf=[-pi, pi];
N=30000;
A=unifrnd(la(1),la(2),[1,N]);
B=unifrnd(lb(1),lb(2),[1,N]);
C=unifrnd(lc(1),lc(2),[1,N]);
D=unifrnd(ld(1),ld(2),[1,N]);
E=unifrnd(le(1),le(2),[1,N]);
F=unifrnd(lf(1),lf(2),[1,N]);
G= cell(N, 6);
for n = 1:N
G{n} =[A(n) B(n) C(n) D(n) E(n) F(n)];
end
H1=cell2mat(G);
T=double(myrobot.fkine(H1));
% figure(2)
% subplot(1,2,1)
% scatter3(squeeze(T(1,4,:)),squeeze(T(2,4,:)),squeeze(T(3,4,:))); %random points
% myrobot.plot(q)
% hold on
xx(:,1)=T(1,4,:);
yy(:,1)=T(2,4,:);
zz(:,1)=T(3,4,:);
% subplot(1,2,2)
alp = 0.2; region = 0.75; %hole = 1; region = 0.75;
shp = alphaShape(xx,yy,zz,alp); %generate point cloud envelope datas
% plot(shp); %show
v= volume(shp);
% title(['v= ',num2str(v) ,'v']) %compute the envelope volume
end
%%
%绘图显示4维曲面
datas=Resu;
x=datas(:,3);y=datas(:,4);z=datas(:,5);v=datas(:,1);
[xi,yi]=meshgrid(x,y);
[xi,yi,zi]=griddata(x,y,z,xi,yi,'v4');
[xi,yi,vi]=griddata(x,y,v,xi,yi,'v4');
figure
surf(xi,yi,zi,vi);
shading interp;
hold on
scatter(x,y,z,'ro');
plot3(x,y,z,'ro')
grid on;
% shading flat
% shading faceted
colorbar
axis tight
输出计算结果:
------------------------------------
Volum m d4 d5 a2
Resu =
8.5901 0.5036 1.2600 0.7800 0.3000
8.8428 0.5130 1.1400 0.9000 0.3000
9.1855 0.5105 1.0200 1.0200 0.3000
9.4455 0.5515 1.3800 0.7800 0.3000
9.6539 0.5670 1.2600 0.9000 0.3000
9.9568 0.5705 1.1400 1.0200 0.3000
10.3966 0.6210 1.3800 0.9000 0.3000
10.8041 0.6306 1.2600 1.0200 0.3000
11.2243 0.6281 1.1400 1.1400 0.3000
11.5987 0.6906 1.3800 1.0200 0.3000
11.9490 0.6942 1.2600 1.1400 0.3000
12.8679 0.7604 1.3800 1.1400 0.3000
13.3560 0.7580 1.2600 1.2600 0.3000
14.2303 0.8302 1.3800 1.2600 0.3000
12.7404 0.7649 1.1400 0.9000 0.4200
13.2435 0.7560 1.0200 1.0200 0.4200
15.5346 0.9001 1.3800 1.3800 0.3000
13.9165 0.8455 1.2600 0.9000 0.4200
14.4656 0.8449 1.1400 1.0200 0.4200
15.1265 0.9260 1.3800 0.9000 0.4200
15.4837 0.9339 1.2600 1.0200 0.4200
16.2439 0.9251 1.1400 1.1400 0.4200
16.4666 1.0432 1.2600 0.7800 0.5400
16.7363 1.0228 1.3800 1.0200 0.4200
17.2362 1.0225 1.2600 1.1400 0.4200
17.5748 1.0266 1.0200 1.0200 0.5400
17.9761 1.1426 1.3800 0.7800 0.5400
18.4775 1.1199 1.3800 1.1400 0.4200
19.4510 1.1113 1.2600 1.2600 0.4200
18.9135 1.1474 1.1400 1.0200 0.5400
20.3798 1.2172 1.3800 1.2600 0.4200
20.4980 1.2682 1.2600 1.0200 0.5400
21.1719 1.2498 1.1400 1.1400 0.5400
21.9624 1.3231 1.0200 1.0200 0.6600
22.5688 1.3146 1.3800 1.3800 0.4200
21.9614 1.3890 1.3800 1.0200 0.5400
22.8850 1.3814 1.2600 1.1400 0.5400
23.5176 1.4788 1.1400 1.0200 0.6600
24.6821 1.7141 1.2600 0.7800 0.7800
24.2349 1.5130 1.3800 1.1400 0.5400
25.2861 1.4950 1.2600 1.2600 0.5400
26.1057 1.6460 1.0200 1.0200 0.7800
26.9864 1.8774 1.3800 0.7800 0.7800
25.1694 1.6344 1.2600 1.0200 0.6600
26.2841 1.6031 1.1400 1.1400 0.6600
26.6723 1.6373 1.3800 1.2600 0.5400
27.4375 1.7901 1.3800 1.0200 0.6600
28.2179 1.7718 1.2600 1.1400 0.6600
30.4491 1.9958 1.0200 1.0200 0.9000
29.6138 1.7620 1.3800 1.3800 0.5400
30.3641 2.0333 1.2600 1.0200 0.7800
29.9648 1.9406 1.3800 1.1400 0.6600
31.4899 1.9098 1.2600 1.2600 0.6600
32.7612 2.2306 1.1400 1.0200 0.9000
34.9279 2.3729 1.0200 1.0200 1.0200
32.6540 2.2270 1.3800 1.0200 0.7800
32.9205 2.0917 1.3800 1.2600 0.6600
35.4862 2.4655 1.2600 1.0200 0.9000
36.5399 2.3977 1.1400 1.1400 0.9000
37.3039 2.6521 1.1400 1.0200 1.0200
36.2533 2.2432 1.3800 1.3800 0.6600
36.9761 2.3565 1.2600 1.2600 0.7800
37.8554 2.7003 1.3800 1.0200 0.9000
38.8441 2.6501 1.2600 1.1400 0.9000
40.2153 2.9313 1.2600 1.0200 1.0200
41.5861 2.8400 1.1400 1.1400 1.0200
38.9453 2.5809 1.3800 1.2600 0.7800
41.4322 2.9025 1.3800 1.1400 0.9000
42.3889 2.8357 1.2600 1.2600 0.9000
42.4813 3.2104 1.3800 1.0200 1.0200
42.5680 2.7590 1.3800 1.3800 0.7800
43.8616 3.1389 1.2600 1.1400 1.0200
46.4366 3.3128 1.1400 1.1400 1.1400
45.0935 3.1058 1.3800 1.2600 0.9000
46.8139 3.4379 1.3800 1.1400 1.0200
48.0944 3.3479 1.2600 1.2600 1.0200
49.1066 3.6616 1.2600 1.1400 1.1400
48.9555 3.3101 1.3800 1.3800 0.9000
49.9600 3.6668 1.3800 1.2600 1.0200
51.5439 4.0103 1.3800 1.1400 1.1400
53.3726 3.8936 1.2600 1.2600 1.1400
54.6575 3.8969 1.3800 1.3800 1.0200
55.4739 4.2644 1.3800 1.2600 1.1400
58.0997 4.4730 1.2600 1.2600 1.2600
60.1194 4.5200 1.3800 1.3800 1.1400
59.9018 4.8990 1.3800 1.2600 1.2600
65.1913 5.1798 1.3800 1.3800 1.2600
69.3312 5.8765 1.3800 1.3800 1.3800



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











