







问题的引入(构造最小代价生成树)
-
假设要在 n 个城市之间建立通信联络网,则连通 n 个城市只需要 n-1 条线路。此时需要考虑如何在最节省经费的前提下建立这个通信网。
在每两个城市之间都可以设置一条线路,相应的都要付出一定的经济代价, n 个城市之间最多可以设置 n( n-1 ) / 2 条线路(无向图),需要在其中选择 n-1 条,使得总的耗费最少。 -
使用
连通网来表示 n 个城市以及 n 个城市间可能设置的通信线路,其中网的顶点表示城市,边表示两城市之间的线路,每条边的权值表示相应的代价。 -
对于
n 个顶点的连通网可以建立许多不同的生成树,每一棵生成树都可以是一个通信网。
现在要选择一棵生成树,使得总的耗费最少。
这就是如何构造连通网的最小代价生成树的问题。
一棵生成树的代价就是树上各边代价之和。
MST性质
-
假设
N = ( V , { E } )是一个连通网,U 是 顶点集V 的一个非空子集。若 ( u , v ) 是一条具有最小权值 ( 代价 )的边,其中 u ∈ U,v ∈ V - U,则必存在一棵包含 边 ( u , v ) 的最小生成树。 -
使用
反证法证明上面的性质:
假设网 N 的任意一棵最小生成树都不包含 ( u , v )。
设 T 是连通网上的一棵最小生成树,当将边 ( u , v ) 加入到 T 中,由于生成树的定义,T 中必存在一条包含 (u , v) 的回路。
另一方面,由于 T 是生成树,则在 T 上必存在另一条边 ( u’ , v’ ),其中 u’ ∈ U,v’ ∈ V - U,且 u 和 u’ 之间有路径相通,v 和 v’ 之间均有路径相通。删去边(u’ , v’),便可消除上述回路,同时得到另一棵生成树 T’ 。
因为(u , v)的代价不高于(u’ , v’)的代价,则 T’ 的代价亦不高于 T,T’ 是包含(u , v)的一棵最小生成树。由此和假设矛盾。
【注意,(u’ , v’) 就是跨过集合U和集合V-U分界线的那条线】 -
基于
MST性质的构造最小生成树的两个算法
1、Prim算法
2、Kruskal算法
Prim算法
-
假设 N = ( V , {E} ) 是
连通网,TE 是 N 上最小生成树中边的集合。
Prim算法
从U= { U0 } (u0 ∈ V),TE= { } 开始,重复执行下述操作:
在所有 u∈U,v∈V - U的边(u , v)∈ E 中找到一条代价最小的边 (u0 , v0)并入集合TE,同时 v0 并入U,直到 U=V 为止。
此时 TE 中必有 n-1 条边,则 T = ( V , {TE} ) 为 N 的最小生成树。 -
为实现这个算法需附设一个
辅助数组closedge,以记录从U到V-U具有最小代价的边。
对每个顶点 vi ∈ V-U,在辅助数组中存在一个相应分量 closedge [ i-1 ],它包括 2 个域,
其中lowcost域存储该边上的权。vex域存储该边依附的在 U 中的顶点。
closedge [ i - 1] . lowcost = Min { cost ( u, vi ) | u ∈ U }
生成过程图示如下:


例如,上图为按Prim算法构造网的一棵最小生成树的过程,在构造过程中辅助数组中各分量值的变化如上图所示
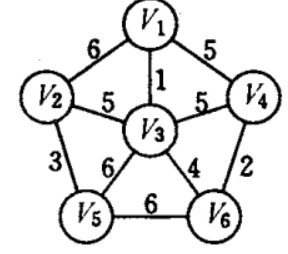
由于 U = { V1 },则到 V - U 中各顶点的最小边,即为从 依附于 顶点1 的各条边中,找到一条代价最小的边(u0 , v0)= (1 , 3)为生成树上的第一条边,同时将 v0(= v3)并入 集合U。
然后修改辅助数组的值,首先将 closedge [ 2 ] . lowcost 改为 ‘0’,以示顶点 v3 已并入 U。
然后,由于 边(v3 , v2)的权值小于 closedge[ 1 ] . lowcost,则需修改 closedge[ 1 ] 为 边(v3 , v2)及其权值。
同理,修改 closedge[ 4 ] 和 closedge[ 5 ],依此类推,直到 U = V。 -
Prim算法代码
以二维数组表示网的邻接矩阵,且设两个顶点之间不存在的边的权值为机内允许的最大值(INT_MAX)
// 利用 prim算法 从 网G 第 u 个顶点出发,构造
// 网G 的最小生成树
void MiniSpanTree_Prim(MGraph G, VertexType u)
{
// 设辅助数组记录代价最小的边
struct
{
VertexType adjvex; //边所依附的顶点,另一个closedge的数组号
VRType lowcost; //边的权值
} closedge[MAX_VERTEX_NUM];
k = LocateVex(G, u); // u 作为起始点
for(j=0; j<G.vexnum; j++) // 辅助数组初始化
{
if(j != k)
{
closedge[j] = {u, G.arcs[k][j].adj};
}
}
closedge[k].lowcost = 0; // 第k个顶点并入u集
for(i=1; i<G.vexnum; i++)
{
k = minimum(closedge);
printf(closedge[k].adjvex, G.vexs[k]);// 输出生成树的边
closedge[k].lowcost = 0; // 第k个顶点并入u集
for(j=0; j<G.vexnum; j++)
{
// 新顶点并入 U 后重新选择最小边
if(G.arcs[k][j].adj < closedge[j].lowcost)
{
closedge[j] = {G.vexs[k], G.arcs[k][j].adj};
}
}
}
}
- Krim算法的
时间复杂度为 O(n2)
算法中第一个初始化的循环语句的频度是 n。
第二个循环语句的频度是 n-1 。其中有两个内循环,其一是在 closedge[ v ] . lowest 中求最小值,其频度为 n - 1。其二是重新选择具有最小代价的边,频度为 n。
时间复杂度与网中的边数无关,适用于求边稠密的网的最小生成树。
Kruskal算法
- 假设连通网 N =(V , {E}),则令最小生成树的
初始状态为只有 n 个顶点而无边的非连通图 T =( V , { } ),图中每个顶点自成一个连通分量。
在 E 中选择一个代价最小的边,若该边依附的顶点落在 T 中不同的连通分量上,则将此边加入到 T 中,否则会舍去此边而选择下一条代价最小的边。 - 关系集 E
- Kruskal算法构造最小生成树的过程

代价分别为 1,2 ,3,4 的 4 条边由于满足了上述条件,则先后被加入到 T 中。
代价为 5 的两条边(v1 , v4)和(v3 , v4)被舍去,因为它们依附的两顶点在同一连通分量上,它们若加入 T 中,则会使 T 中产生回路,
而下一条代价( 5 )最小的边(v2 , v3)联结两个普通分量,则(v2 , v3)可以加入 T。
由此构造成一棵最小生成树。
- 时间复杂度
上述算法最多对 e 条边各扫描一次,时间复杂度为 O ( e * log e ) (e 为网中边的数目)。
相比 Prim算法,Kruskal算法适合求边稀疏的网的最小生成树。
上述算法至多对 e 条边各扫描一次,假若以第 9 章介绍的 “堆” 来存放网中的边,则每次选择最小代价的边仅需 O ( log e ) 的时间(第一次需 O ( e ))。















 7716
7716











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









