









关于原理,网上讲的太多了,我就直接上代码了。
Auto Encoder 在MNIST 上记录
直接上代码
import os
os.chdir(os.path.dirname(__file__))
import torch
import torch.nn as nn
import torch.nn.functional as F
import torchvision
from torchvision import transforms
from torchvision.utils import save_image
from torch.utils.tensorboard import SummaryWriter
device = torch.device('cuda' if torch.cuda.is_available() else 'cpu')
sample_dir = 'samples'
if not os.path.exists(sample_dir):
os.makedirs(sample_dir, exist_ok=True)
writer = SummaryWriter(sample_dir)
# Hyper-parameters
image_size = 784
h_dim = 400
z_dim = 20
num_epochs = 15
batch_size = 128
learning_rate = 1e-3
# MNIST dataset
dataset_train = torchvision.datasets.MNIST(root='../data',
train=True,
transform=transforms.ToTensor(),
download=True)
dataset_test = torchvision.datasets.MNIST(root='../data',
train=False,
transform=transforms.ToTensor(),
download=True)
data_loader_train = torch.utils.data.DataLoader(dataset=dataset_train,
batch_size=batch_size,
shuffle=True)
data_loader_test = torch.utils.data.DataLoader(dataset=dataset_test,
batch_size=batch_size,
shuffle=False)
# AE model
class AE(nn.Module):
def __init__(self, image_size=784, h_dim=400, z_dim=20):
super(AE, self).__init__()
self.fc1 = nn.Linear(image_size, h_dim)
self.fc2 = nn.Linear(h_dim, z_dim)
# self.fc3 = nn.Linear(h_dim, z_dim)
self.fc4 = nn.Linear(z_dim, h_dim)
self.fc5 = nn.Linear(h_dim, image_size)
def encode(self, x):
x = F.relu(self.fc1(x))
h = F.relu(self.fc2(x))
return h
def decode(self, z):
h = F.relu(self.fc4(z))
return F.sigmoid(self.fc5(h))
def forward(self, x):
h = self.encode(x)
x_recon = self.decode(h)
return x_recon
def reconstruct_loss_binaray(x, y):
return F.binary_cross_entropy(x, y, size_average=False)
def reconstruct_loss_real(x, y):
return F.mse_loss(x, y)
model = AE().to(device)
writer.add_graph(model, input_to_model=torch.rand(1, 28 * 28).to(device))
optimizer = torch.optim.Adam(model.parameters(), lr=learning_rate)
ld = len(data_loader_train)
accumulated_iter = 0
for epoch in range(num_epochs):
for i, (x, _) in enumerate(data_loader_train):
# forward
x = x.to(device).view(-1, image_size)
x_recon = model(x)
loss = reconstruct_loss_real(x_recon, x)
optimizer.zero_grad()
loss.backward()
optimizer.step()
accumulated_iter += 1
writer.add_scalar('loss', loss.item(), global_step=accumulated_iter)
if (i+1) % 10 == 0:
print("Epoch[{}/{}], Step [{}/{}], Reconst Loss: {:.4f}".format(epoch+1, num_epochs, i+1, ld, loss.item()))
# 根据test数据集来看重建效果
# with torch.no_grad():
# x,_ = iter(data_loader_test).next()
# x = x.to(device).view(-1, image_size)
# x_recon = model(x).view(-1, 1, 28, 28)
# writer.add_images('images_src', x.view(-1, 1, 28, 28), global_step=epoch)
# writer.add_images('images_reconst', x_recon, global_step=epoch)
# 根据随机变量decode来看重建效果
with torch.no_grad():
z = torch.randn(batch_size, z_dim).to(device)
x_recon = model.decode(z).view(-1, 1, 28, 28)
writer.add_images('images_reconst', x_recon, global_step=epoch)
writer.close()
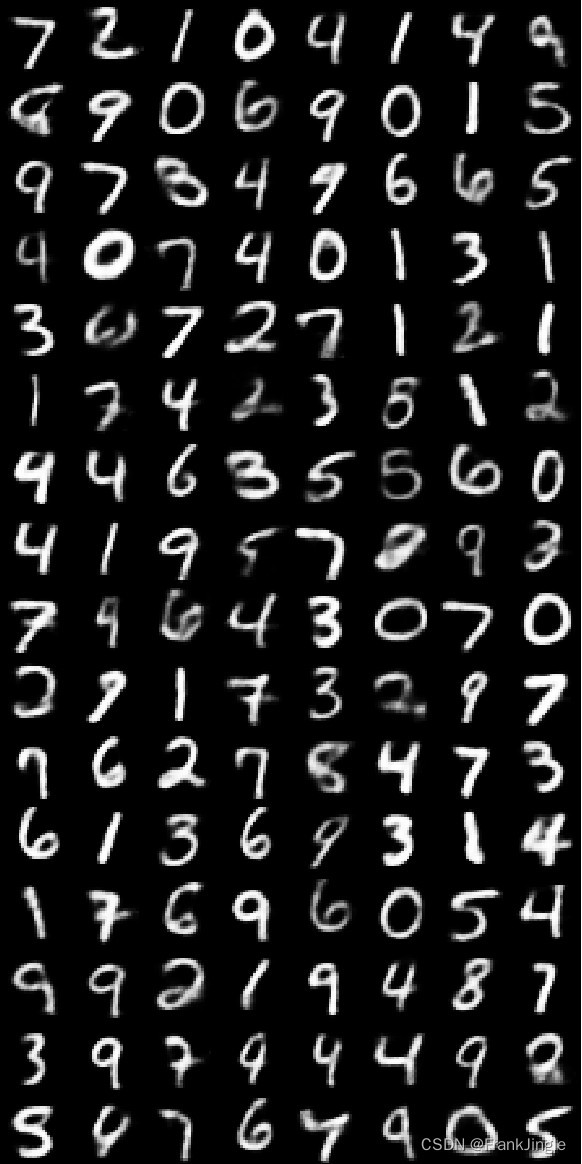
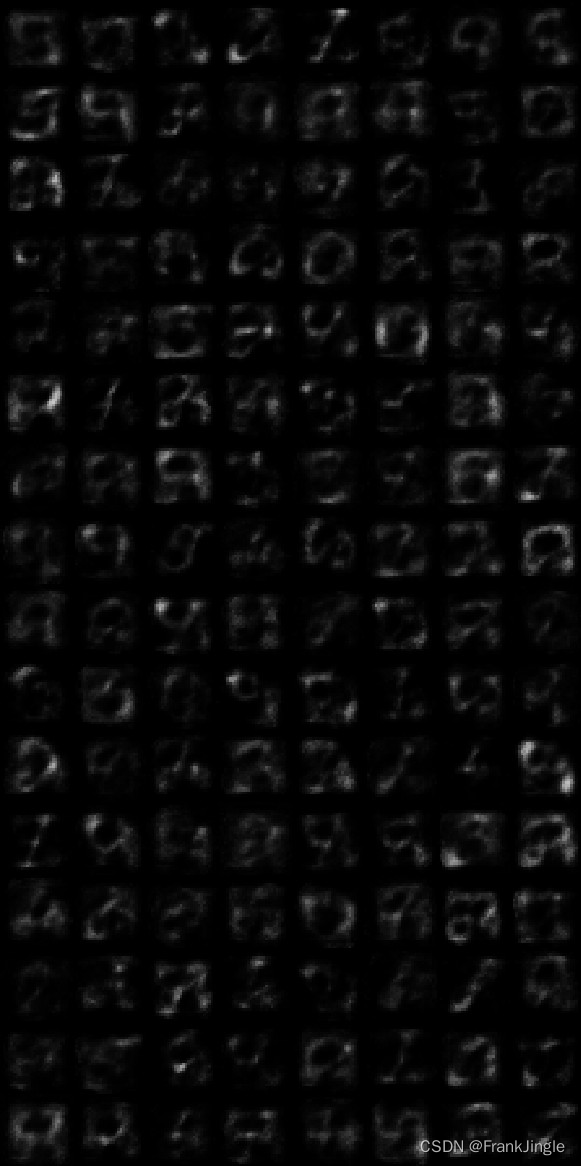
loss函数用了两种,一种MSE,一种是CrossEntropy。测试阶段尝试两种,一种是用test集合做测试,一种是随机给一个隐变量,解码出一个结果,效果分别如下:
test测试集效果如下
随机隐变量效果如下,可以看到非常差
Variational Auto Encoder 在MNIST 上记录
代码如下,只有model和部分训练代码有修改
import os
os.chdir(os.path.dirname(__file__))
import torch
import torch.nn as nn
import torch.nn.functional as F
import torchvision
from torchvision import transforms
from torchvision.utils import save_image
from torch.utils.tensorboard import SummaryWriter
device = torch.device('cuda' if torch.cuda.is_available() else 'cpu')
sample_dir = 'samples'
if not os.path.exists(sample_dir):
os.makedirs(sample_dir, exist_ok=True)
writer = SummaryWriter(sample_dir)
# Hyper-parameters
image_size = 784
h_dim = 400
z_dim = 20
num_epochs = 15
batch_size = 128
learning_rate = 1e-3
# MNIST dataset
dataset_train = torchvision.datasets.MNIST(root='../data',
train=True,
transform=transforms.ToTensor(),
download=True)
dataset_test = torchvision.datasets.MNIST(root='../data',
train=False,
transform=transforms.ToTensor(),
download=True)
data_loader_train = torch.utils.data.DataLoader(dataset=dataset_train,
batch_size=batch_size,
shuffle=True)
data_loader_test = torch.utils.data.DataLoader(dataset=dataset_test,
batch_size=batch_size,
shuffle=False)
# VAE model
class VAE(nn.Module):
def __init__(self, image_size=784, h_dim=400, z_dim=20):
super(VAE, self).__init__()
self.fc1 = nn.Linear(image_size, h_dim)
self.fc2 = nn.Linear(h_dim, z_dim)
self.fc3 = nn.Linear(h_dim, z_dim)
self.fc4 = nn.Linear(z_dim, h_dim)
self.fc5 = nn.Linear(h_dim, image_size)
def encode(self, x):
h = F.relu(self.fc1(x))
return self.fc2(h), self.fc3(h)
def decode(self, z):
h = F.relu(self.fc4(z))
return F.sigmoid(self.fc5(h))
def reparameterize(self, mu, log_var):
std = torch.exp(log_var/2)
eps = torch.randn_like(std)
return mu + eps * std
def forward(self, x):
mu, log_var = self.encode(x)
z = self.reparameterize(mu, log_var)
x_recon = self.decode(z)
return x_recon, mu, log_var
def reconstruct_loss_binaray(x, y):
return F.binary_cross_entropy(x, y, size_average=False)
def reconstruct_loss_real(x, y):
return F.mse_loss(x, y)
def kl_loss(mu, log_var):
return -0.5 * torch.sum(1 + log_var - mu.pow(2) - log_var.exp())
model = VAE().to(device)
writer.add_graph(model, input_to_model=torch.rand(1, 28 * 28).to(device))
optimizer = torch.optim.Adam(model.parameters(), lr=learning_rate)
ld = len(data_loader_train)
accumulated_iter = 0
for epoch in range(num_epochs):
for i, (x, _) in enumerate(data_loader_train):
# forward
x = x.to(device).view(-1, image_size)
x_recon, mu, log_var = model(x)
loss_rec = reconstruct_loss_binaray(x_recon, x)
loss_kl = kl_loss(mu, log_var)
loss = loss_rec + loss_kl
optimizer.zero_grad()
loss.backward()
optimizer.step()
accumulated_iter += 1
writer.add_scalar('loss', loss.item(), global_step=accumulated_iter)
if (i+1) % 10 == 0:
print("Epoch[{}/{}], Step [{}/{}], Reconst Loss: {:.4f}, KL Loss: {:.4f}.".format(epoch+1, num_epochs, i+1, ld, loss_rec.item(), loss_kl.item()))
# 根据test数据集来看重建效果
with torch.no_grad():
x,_ = iter(data_loader_test).next()
x = x.to(device).view(-1, image_size)
x_recon,_,_ = model(x)
x_recon = x_recon.view(-1, 1, 28, 28)
writer.add_images('images_src', x.view(-1, 1, 28, 28), global_step=epoch)
writer.add_images('images_reconst', x_recon, global_step=epoch)
# 根据随机变量decode来看重建效果
# with torch.no_grad():
# z = torch.randn(batch_size, z_dim).to(device)
# x_recon = model.decode(z).view(-1, 1, 28, 28)
# writer.add_images('images_reconst', x_recon, global_step=epoch)
writer.close()
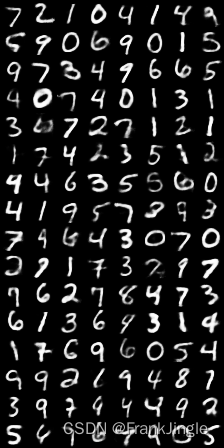
单独看测试集重建结果,区别不大
根据随机数重建的效果还可以,比AE强很多了。

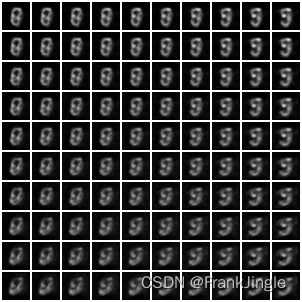
这里也试试把隐变量Z设为全0,然后前两维进行一个遍历,看看输出的结果是不是有某种规律,代码如下
with torch.no_grad():
x_all = torch.zeros(10, 10, 1, 28, 28).to(device)
for a, da in enumerate(torch.linspace(-0.5, 0.5, 10)):
for b, db in enumerate(torch.linspace(-0.5, 0.5, 10)):
z = torch.zeros(1, z_dim).to(device)
z[0, 0] = da
z[0, 1] = db
x_recon = model.decode(z).view(-1, 1, 28, 28)
x_all[a,b] = x_recon[0]
x_all = x_all.view(10*10, 1, 28, 28)
imgs = torchvision.utils.make_grid(x_all, pad_value=2,nrow=10)
writer.add_image('images_uniform', imgs, epoch, dataformats='CHW')
图片太小,不是很清晰,但是也能很明显的看到图像沿着x和y轴在发生形变
Auto Encoder 在Anime 上记录
这里我们试试更加复杂的数据集,二次元头像数据集,数据集下载自 https://github.com/jayleicn/animeGAN
并且我们也把模型改成CNN进行尝试
代码如下
import os
os.chdir(os.path.dirname(__file__))
import torch
import torch.nn as nn
import torch.nn.functional as F
import torchvision
import torchvision.datasets as dset
from torchvision import transforms
from torchvision.utils import save_image
from torch.utils.tensorboard import SummaryWriter
device = torch.device('cuda' if torch.cuda.is_available() else 'cpu')
sample_dir = 'samples'
if not os.path.exists(sample_dir):
os.makedirs(sample_dir, exist_ok=True)
writer = SummaryWriter(sample_dir)
# Hyper-parameters
h_dim = 1024
z_dim = 32
num_epochs = 15
batch_size = 128
learning_rate = 1e-3
data_root = '../data/anime-faces'
# Anime dataset
def is_valid_file(fpath):
fname = os.path.basename(fpath)
return fname[0] != '.'
T = transforms.Compose([
transforms.Scale(64),
transforms.ToTensor(),
transforms.Normalize((0.5,0.5,0.5), (0.5,0.5,0.5)), # bring images to (-1,1)
])
dataset = dset.ImageFolder(
root=data_root,
transform=T,
is_valid_file=is_valid_file
)
data_loader = torch.utils.data.DataLoader(dataset,
batch_size=batch_size,
shuffle=True,
num_workers=1)
# AE model
class AE(nn.Module):
def __init__(self, h_dim=h_dim, z_dim=z_dim):
super(AE, self).__init__()
self.conv1 = nn.Conv2d(3, 32, 4, stride=2, padding=1)
self.conv2 = nn.Conv2d(32, 64, 4, stride=2, padding=1)
self.conv3 = nn.Conv2d(64, 128, 4, stride=2, padding=1)
self.conv4 = nn.Conv2d(128, 256, 4, stride=2, padding=1)
self.fc1 = nn.Linear(4096, h_dim)
self.fc2 = nn.Linear(h_dim, z_dim)
self.deconv1 = nn.ConvTranspose2d(256, 128, 4, stride=2, padding=1)
self.deconv2 = nn.ConvTranspose2d(128, 64, 4, stride=2, padding=1)
self.deconv3 = nn.ConvTranspose2d(64, 32, 4, stride=2, padding=1)
self.deconv4 = nn.ConvTranspose2d(32, 3, 4, stride=2, padding=1)
self.fc3 = nn.Linear(z_dim, h_dim)
self.fc4 = nn.Linear(h_dim, 4096)
def encode(self, x):
bz = x.shape[0] # 128 x 3 x 64 x 64
x = F.relu(self.conv1(x)) # 128 x 32 x 32 x 32
x = F.relu(self.conv2(x)) # 128 x 64 x 16 x 16
x = F.relu(self.conv3(x)) # 128 x 128 x 8 x 8
x = F.relu(self.conv4(x)) # 128 x 256 x 4 x 4
x = torch.flatten(x, start_dim=1) # 128 x 4096
h = F.relu(self.fc1(x)) # 128 x 1024
z = F.relu(self.fc2(h)) # 128 x 32
return z
def decode(self, z):
h = F.relu(self.fc3(z)) # 128 x 1024
x = F.relu(self.fc4(h)) # 128 x 512
x = x.view(-1, 256, 4, 4) # 128 x 256 x 4 x 4
x = F.relu(self.deconv1(x)) # 128 x 128 x 8 x 8
x = F.relu(self.deconv2(x)) # 128 x 64 x 16 x 16
x = F.relu(self.deconv3(x)) # 128 x 32 x 32 x 32
x = F.tanh(self.deconv4(x)) # 128 x 3 x 64 x 64
return x
def forward(self, x):
h = self.encode(x)
x_recon = self.decode(h)
return x_recon
def reconstruct_loss_binaray(x, y):
return F.binary_cross_entropy(x, y, size_average=False)
def reconstruct_loss_real(x, y):
return F.mse_loss(x, y, size_average=False)
model = AE().to(device)
optimizer = torch.optim.Adam(model.parameters(), lr=learning_rate)
ld = len(data_loader)
accumulated_iter = 0
for epoch in range(num_epochs):
for i, (x, _) in enumerate(data_loader):
# forward
x = x.to(device)
x_recon = model(x)
loss = reconstruct_loss_real(x_recon, x)
optimizer.zero_grad()
loss.backward()
optimizer.step()
accumulated_iter += 1
writer.add_scalar('loss', loss.item(), global_step=accumulated_iter)
if (i+1) % 10 == 0:
print("Epoch[{}/{}], Step [{}/{}], Reconst Loss: {:.4f}".format(epoch+1, num_epochs, i+1, ld, loss.item()))
# 根据test数据集来看重建效果
with torch.no_grad():
x,_ = iter(data_loader).next()
x = x.to(device)
x_recon = model(x)
imgs_src = torchvision.utils.make_grid(x, pad_value=2, normalize=True)
writer.add_image('images_src', imgs_src, epoch, dataformats='CHW')
imgs_rec = torchvision.utils.make_grid(x_recon, pad_value=2, normalize=True)
writer.add_image('images_reconst', imgs_rec, epoch, dataformats='CHW')
# 根据随机变量decode来看重建效果
with torch.no_grad():
z = torch.randn(batch_size, z_dim).to(device)
x_recon = model.decode(z).view(-1, 3, 64, 64)
imgs_rand = torchvision.utils.make_grid(x_recon, pad_value=2, normalize=True)
writer.add_image('images_random', imgs_rand, epoch, dataformats='CHW')
writer.close()
针对代码,补充一句,里面计算loss时的size_average=False非常重要,不加上的话训练会出问题。
重建的效果如下,看着马马虎虎,比较模糊,没有好好调代码,应该还可以提升

随机生成的效果就非常差了

VAE 在Anime 上记录
再看看VAE的效果。
代码我就不重复贴这么多了,把模型部分贴上来
# VAE model
class VAE(nn.Module):
def __init__(self, h_dim=h_dim, z_dim=z_dim):
super(VAE, self).__init__()
self.conv1 = nn.Conv2d(3, 32, 4, stride=2, padding=1)
self.conv2 = nn.Conv2d(32, 64, 4, stride=2, padding=1)
self.conv3 = nn.Conv2d(64, 128, 4, stride=2, padding=1)
self.conv4 = nn.Conv2d(128, 256, 4, stride=2, padding=1)
self.fc1 = nn.Linear(4096, h_dim)
self.fc2_1 = nn.Linear(h_dim, z_dim)
self.fc2_2 = nn.Linear(h_dim, z_dim)
self.deconv1 = nn.ConvTranspose2d(256, 128, 4, stride=2, padding=1)
self.deconv2 = nn.ConvTranspose2d(128, 64, 4, stride=2, padding=1)
self.deconv3 = nn.ConvTranspose2d(64, 32, 4, stride=2, padding=1)
self.deconv4 = nn.ConvTranspose2d(32, 3, 4, stride=2, padding=1)
self.fc3 = nn.Linear(z_dim, h_dim)
self.fc4 = nn.Linear(h_dim, 4096)
def reparameterize(self, mu, log_var):
std = torch.exp(log_var/2)
eps = torch.randn_like(std)
return mu + eps * std
def encode(self, x):
bz = x.shape[0] # 128 x 3 x 64 x 64
x = F.relu(self.conv1(x)) # 128 x 32 x 32 x 32
x = F.relu(self.conv2(x)) # 128 x 64 x 16 x 16
x = F.relu(self.conv3(x)) # 128 x 128 x 8 x 8
x = F.relu(self.conv4(x)) # 128 x 256 x 4 x 4
x = torch.flatten(x, start_dim=1) # 128 x 4096
h = F.relu(self.fc1(x)) # 128 x 1024
return self.fc2_1(h), self.fc2_2(h), # 128 x 30
def decode(self, z):
h = F.relu(self.fc3(z)) # 128 x 1024
x = F.relu(self.fc4(h)) # 128 x 512
x = x.view(-1, 256, 4, 4) # 128 x 256 x 4 x 4
x = F.relu(self.deconv1(x)) # 128 x 128 x 8 x 8
x = F.relu(self.deconv2(x)) # 128 x 64 x 16 x 16
x = F.relu(self.deconv3(x)) # 128 x 32 x 32 x 32
x = F.tanh(self.deconv4(x)) # 128 x 3 x 64 x 64
return x
def forward(self, x):
mu, log_var = self.encode(x)
z = self.reparameterize(mu, log_var)
x_recon = self.decode(z)
return x_recon, mu, log_var
再就是训练的时候
for epoch in range(num_epochs):
for i, (x, _) in enumerate(data_loader):
# forward
x = x.to(device)
x_recon, mu, log_var = model(x)
loss_rec = reconstruct_loss_real(x_recon, x)
loss_kl = kl_loss(mu, log_var)
loss = loss_rec + loss_kl
optimizer.zero_grad()
loss.backward()
optimizer.step()
针对代码,补充一句,里面计算loss时的size_average=False非常重要,不加上的话训练会出问题。但是有一个问题我没想明白,就是在我设为True的时候,为什么也会影响到kl_loss的计算出来的值的大小呢?设为True,kl_loss值非常小,设为False,值会比较大,按道理,这个的计算与计算重建loss是独立的才对。
重建的结果

随机生成的结果

总结
VAE的变体非常的多,包括CNN做backbone也有很多不同设计,还有在loss的设计上,包括用Jaccard loss的
def continuous_jaccard(x, y):
"""
Implementation of the continuous version of the
Jaccard distance:
1 - [sum_i min(x_i, y_i)] / [sum_i max(x_i, y_i)]
"""
c = torch.cat((x.view(-1).unsqueeze(1), y.view(-1).unsqueeze(1)), dim=1)
numerator = torch.sum(torch.min(c, dim=1)[0])
denominator = torch.sum(torch.max(c, dim=1)[0])
return 1. - numerator/denominator
一种比较经典的变体是Conditional VAE,也叫CVAE,会把一些额外信息引入,比如,在encoder的时候,会把图片的label做编码(one-hot),然后和feature concat起来,作为隐式表达,在decoder的时候,也会送入想要生成那个类别,把这个类别也做one-hot,送进入参与decode过程,这样就可以自由控制想要生成的类别了。代码例如
def encoder(self, features, targets):
### Add condition
onehot_targets = to_onehot(targets, self.num_classes, device)
x = torch.cat((features, onehot_targets), dim=1)
### ENCODER
x = self.hidden_1(x)
x = F.leaky_relu(x)
z_mean = self.z_mean(x)
z_log_var = self.z_log_var(x)
encoded = self.reparameterize(z_mean, z_log_var)
return z_mean, z_log_var, encoded
def decoder(self, encoded, targets):
### Add condition
onehot_targets = to_onehot(targets, self.num_classes, device)
encoded = torch.cat((encoded, onehot_targets), dim=1)
### DECODER
x = self.linear_3(encoded)
x = F.leaky_relu(x)
x = self.linear_4(x)
decoded = torch.sigmoid(x)
感兴趣的可以参考 https://github.com/rasbt/deeplearning-models/tree/master/pytorch_ipynb/autoencoder















 1224
1224











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









