







 这篇博客介绍了μC/OS-Ⅱ操作系统中互斥信号量(Mutex)的概念,用于解决优先级反转问题。Mutex通过优先级继承机制保护共享资源,防止高优先级任务被低优先级任务阻塞。文中详细阐述了Mutex的组成,包括标志、优先级继承优先级、任务指针和等待任务列表。同时,讲解了创建、删除、获取和释放Mutex的相关函数OSMutexCreate()、OSMutexDel()、OSMutexPend()和OSMutexPost()的工作流程,以及如何处理优先级提升和任务切换。
这篇博客介绍了μC/OS-Ⅱ操作系统中互斥信号量(Mutex)的概念,用于解决优先级反转问题。Mutex通过优先级继承机制保护共享资源,防止高优先级任务被低优先级任务阻塞。文中详细阐述了Mutex的组成,包括标志、优先级继承优先级、任务指针和等待任务列表。同时,讲解了创建、删除、获取和释放Mutex的相关函数OSMutexCreate()、OSMutexDel()、OSMutexPend()和OSMutexPost()的工作流程,以及如何处理优先级提升和任务切换。
互斥信号量(Mutual Exclusion Semaphores)也称为Mutex,用于实现对共享资源的独占处理,互斥信号量也是一个二值信号量,利用它可以降解优先级反转问题。
当高优先级任务需要使用某个共享资源,而恰巧该共享资源又被一个低优先级任务占用时,优先级反转问题就会发生。为了降解优先级反转,内核就必须支持优先级继承,将低优先级任务的优先级提升到高于高优先级任务的优先级,直到低优先级任务处理完毕共享资源。
互斥信号量只能提供给任务使用,因为互斥信号量是用来处理共享资源的
µC/OS-Ⅱ的互斥信号量由四个元素组成:1个标志,指示Mutex是否可用(0xFF或其它);1个优先级继承优先级PIP,一旦有高优先级任务需要Mutex,内核就会将PIP赋给占用Mutex的任务;1个指向占有该Mutex的任务指针;1个Mutex等待任务列表。
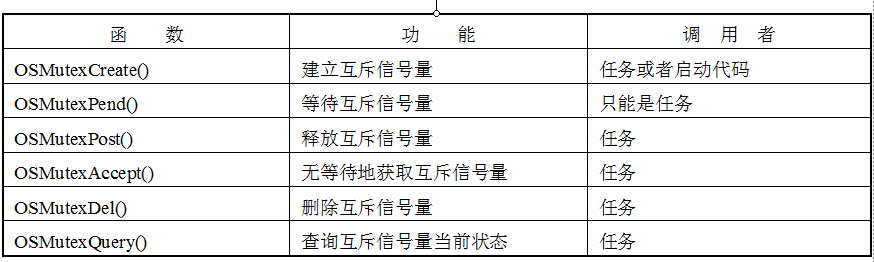
µC/OS-Ⅱ提供了六种对互斥信号量进行管理的函数,函数所属文件是OS_MUTEX.C。
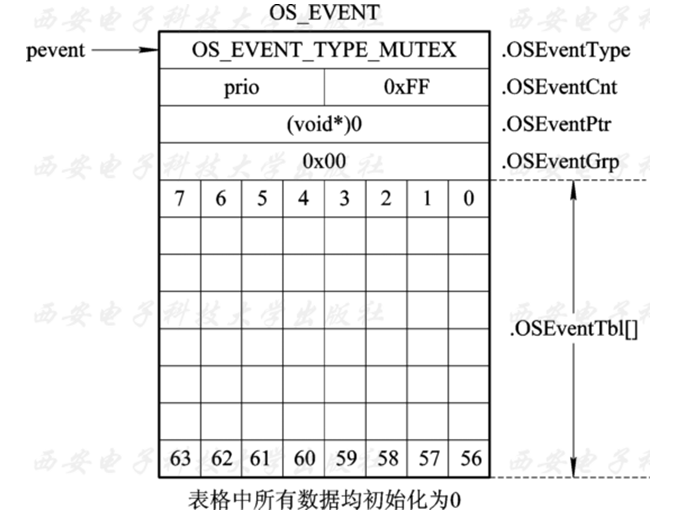
OSMutexCreate()函数的主要工作过程是:首先进行运行条件检查;其次检查PIP优先级是否被占用;再次检查是否有可用的事件控制块;最后当上述条件都满足后,进行Mutex的建立。此时,因为已经取走了一个空闲ECB,所以要调整空闲ECB链表指针,使其指向下一个空闲ECB。紧接着将ECB设置成Mutex类型,且保存PIP并将Mutex设置为有效状态。当等待任务列表初始化完毕后,返回ECB指针。其中,值得注意的是:这里的事件计数器 OSEventCt与信号量的不同,其高8位保存PIP,低8位在没有任务占用时为0xFF,有任务占用时,用于保存占用任务的优先级。这样做的目的是为了减少数据量,避免OS_EVENT数据结构的额外开销。
图示为OSMutexCreate()函数返回前的ECB数据结构:
OSMutexDel()函数主要工作过程是:首先进行运行条件检查,若不满足,则返回空指针和错误代码;其次按删除条件选择参数opt进行删除,删除后还需要将Mutex的ECB指针交还给空闲ECB链表;如果占有Mutex的任务被提升过优先级,还需调用
OSMutex_RdyAtPrio(ptcb, prio);恢复原来的优先级。
OS_EVENT *OSMutexDel (OS_EVENT *pevent, INT8U opt, INT8U *perr)
{
BOOLEAN tasks_waiting;
OS_EVENT *pevent_return;
INT8U pip; /* Priority inheritance priority */
INT8U prio;
OS_TCB *ptcb;
#if OS_CRITICAL_METHOD == 3 /* Allocate storage for CPU status register */
OS_CPU_SR cpu_sr = 0;
#endif
#if OS_ARG_CHK_EN > 0
if (perr == (INT8U *)0) { /* Validate 'perr' */
return (pevent);
}
if (pevent == (OS_EVENT *)0) { /* Validate 'pevent' */
*perr = OS_ERR_PEVENT_NULL;
return (pevent);
}
#endif
if (pevent->OSEventType != OS_EVENT_TYPE_MUTEX) { /* Validate event block type */
*perr = OS_ERR_EVENT_TYPE;
return (pevent);
}
if (OSIntNesting > 0) { /* See if called from ISR ... */
*perr = OS_ERR_DEL_ISR; /* ... can't DELETE from an ISR */
return (pevent);
}
OS_ENTER_CRITICAL();
if (pevent->OSEventGrp != 0) { /* See if any tasks waiting on mutex */
tasks_waiting = OS_TRUE; /* Yes */
} else {
tasks_waiting = OS_FALSE; /* No */
}
switch (opt) {
case OS_DEL_NO_PEND: /* DELETE MUTEX ONLY IF NO TASK WAITING --- */
if (tasks_waiting == OS_FALSE) {
# 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 8316
8316

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









