







OpenPose C++实现单人姿态估计 - 代码实现
flyfish
运行环境
Ubuntu18.04
Qt 5.12
OpenCV,版本4.2.0
深度学习推理库使用OpenCV DNN
预训练模型下载
COCO模型(18个part)
http://posefs1.perception.cs.cmu.edu/OpenPose/models/pose/coco/pose_iter_440000.caffemodel
https://raw.githubusercontent.com/opencv/opencv_extra/master/testdata/dnn/openpose_pose_coco.prototxt
MPI模型(16个part)):
http://posefs1.perception.cs.cmu.edu/OpenPose/models/pose/mpi/pose_iter_160000.caffemodel
https://raw.githubusercontent.com/opencv/opencv_extra/master/testdata/dnn/openpose_pose_mpi_faster_4_stages.prototxt
手势模型
http://posefs1.perception.cs.cmu.edu/OpenPose/models/hand/pose_iter_102000.caffemodel
https://raw.githubusercontent.com/CMU-Perceptual-Computing-Lab/openpose/master/models/hand/pose_deploy.prototxt
不同的模型不同的输出
以COCO为例输出18个part
这里只下载COCO模型
配置
cv::String modelTxt ="openpose_pose_coco.prototxt";
cv::String modelBin = "pose_iter_440000.caffemodel";
cv::String imageFile = "1.jpg";
cv::String dataset = "COCO";
int W_in = 368;
int H_in = 368;
float thresh = 0.1f;
float scale = 0.003922f;
准备输入到网络
将图像从OpenCV格式转换为Caffe blob格式。
像素值归一化为(0,1)。
指定图像的尺寸W_in, H_in。
减去的平均值是(0,0,0)。由于OpenCV和Caffe都使用BGR格式,就不用交换R和B通道。
Mat img = imread(imageFile);
Mat inputBlob = blobFromImage(img, scale, Size(W_in, H_in), Scalar(0, 0, 0), false, false);
输出解析关键点
COCO dataset的Parts 和 Pairs 索引
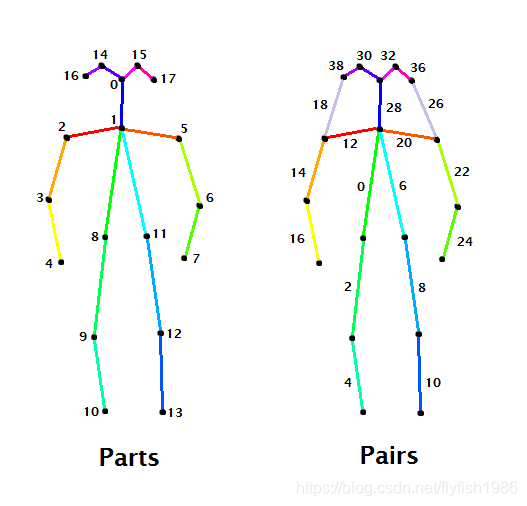
COCO 输出格式
Nose – 0,
Neck – 1,
Right Shoulder – 2,
Right Elbow – 3,
Right Wrist – 4,
Left Shoulder – 5,
Left Elbow – 6,
Left Wrist – 7,
Right Hip – 8,
Right Knee – 9,
Right Ankle – 10,
Left Hip – 11,
Left Knee – 12,
LAnkle – 13,
Right Eye – 14,
Left Eye – 15,
Right Ear – 16,
Left Ear – 17,
Background – 18
MPII 输出格式
Head – 0,
Neck – 1,
Right Shoulder – 2,
Right Elbow – 3,
Right Wrist – 4,
Left Shoulder – 5,
Left Elbow – 6,
Left Wrist – 7,
Right Hip – 8,
Right Knee – 9,
Right Ankle – 10,
Left Hip – 11,
Left Knee – 12,
Left Ankle – 13,
Chest – 14,
Background – 15
Mat result = net.forward();
result如何解析
输出为4维矩阵:
第一个维度是图像ID
第二个维度表示关键点的索引。
该模型生成置信度图(Confidence Map)和Part Affinity map,它们都是连接在一起的。
对于COCO模型,它由57个部分组成,
18个关键点置信度图(confidence Map)+1个背景+19*2个Part Affinity Map。
18+1+38=57
第三个维度是输出图像的高度。
第四个维度是输出图像的宽度。
通过找到该关键点的置信度图的极大值来获得该关键点的位置,使用阈值来减少误检测。
下面代码注释中的Slice heatmap of corresponding body’s part.
slice heatmap 相当于probability map更容易理解
完整代码(OpenCV自带OPenPose实例,以下代码有更改)
pro文件
QT -= gui
CONFIG += c++11 console
CONFIG -= app_bundle
# The following define makes your compiler emit warnings if you use
# any Qt feature that has been marked deprecated (the exact warnings
# depend on your compiler). Please consult the documentation of the
# deprecated API in order to know how to port your code away from it.
DEFINES += QT_DEPRECATED_WARNINGS
# You can also make your code fail to compile if it uses deprecated APIs.
# In order to do so, uncomment the following line.
# You can also select to disable deprecated APIs only up to a certain version of Qt.
#DEFINES += QT_DISABLE_DEPRECATED_BEFORE=0x060000 # disables all the APIs deprecated before Qt 6.0.0
SOURCES += \
main.cpp
# Default rules for deployment.
qnx: target.path = /tmp/$${TARGET}/bin
else: unix:!android: target.path = /opt/$${TARGET}/bin
!isEmpty(target.path): INSTALLS += target
INCLUDEPATH += /usr/local/include \
/usr/local/include/opencv4 \
/usr/local/include/opencv4/opencv2
LIBS += /usr/local/lib/libopencv_calib3d.so \
/usr/local/lib/libopencv_core.so \
/usr/local/lib/libopencv_highgui.so \
/usr/local/lib/libopencv_imgproc.so \
/usr/local/lib/libopencv_imgcodecs.so\
/usr/local/lib/libopencv_objdetect.so\
/usr/local/lib/libopencv_photo.so \
/usr/local/lib/libopencv_dnn.so \
/usr/local/lib/libopencv_features2d.so \
/usr/local/lib/libopencv_stitching.so \
/usr/local/lib/libopencv_flann.so\
/usr/local/lib/libopencv_videoio.so \
/usr/local/lib/libopencv_video.so\
/usr/local/lib/libopencv_ml.so
main.cpp 文件
#include <opencv2/dnn.hpp>
#include <opencv2/imgproc.hpp>
#include <opencv2/highgui.hpp>
using namespace cv;
using namespace cv::dnn;
#include <iostream>
using namespace std;
// connection table, in the format [model_id][pair_id][from/to]
// please look at the nice explanation at the bottom of:
// https://github.com/CMU-Perceptual-Computing-Lab/openpose/blob/master/doc/output.md
//
const int POSE_PAIRS[3][20][2] = {
{ // COCO body
{1,2}, {1,5}, {2,3},
{3,4}, {5,6}, {6,7},
{1,8}, {8,9}, {9,10},
{1,11}, {11,12}, {12,13},
{1,0}, {0,14},
{14,16}, {0,15}, {15,17}
},
{ // MPI body
{0,1}, {1,2}, {2,3},
{3,4}, {1,5}, {5,6},
{6,7}, {1,14}, {14,8}, {8,9},
{9,10}, {14,11}, {11,12}, {12,13}
},
{ // hand
{0,1}, {1,2}, {2,3}, {3,4}, // thumb
{0,5}, {5,6}, {6,7}, {7,8}, // pinkie
{0,9}, {9,10}, {10,11}, {11,12}, // middle
{0,13}, {13,14}, {14,15}, {15,16}, // ring
{0,17}, {17,18}, {18,19}, {19,20} // small
}};
int main(int argc, char **argv)
{
CommandLineParser parser(argc, argv,
"{ h help | false | print this help message }"
"{ p proto | | (required) model configuration, e.g. hand/pose.prototxt }"
"{ m model | | (required) model weights, e.g. hand/pose_iter_102000.caffemodel }"
"{ i image | | (required) path to image file (containing a single person, or hand) }"
"{ d dataset | | specify what kind of model was trained. It could be (COCO, MPI, HAND) depends on dataset. }"
"{ width | 368 | Preprocess input image by resizing to a specific width. }"
"{ height | 368 | Preprocess input image by resizing to a specific height. }"
"{ t threshold | 0.1 | threshold or confidence value for the heatmap }"
"{ s scale | 0.003922 | scale for blob }"
);
// cv::String modelTxt = samples::findFile(parser.get<string>("proto"));
// cv::String modelBin = samples::findFile(parser.get<string>("model"));
// cv::String imageFile = samples::findFile(parser.get<String>("image"));
// cv::String dataset = parser.get<cv::String>("dataset");
// int W_in = parser.get<int>("width");
// int H_in = parser.get<int>("height");
// float thresh = parser.get<float>("threshold");
// float scale = parser.get<float>("scale");
cv::String modelTxt ="openpose_pose_coco.prototxt";
cv::String modelBin = "pose_iter_440000.caffemodel";
cv::String imageFile = "1.jpg";
cv::String dataset = "COCO";
int W_in = 368;
int H_in = 368;
float thresh = 0.1f;
float scale = 0.003922f;
if (parser.get<bool>("help") || modelTxt.empty() || modelBin.empty() || imageFile.empty())
{
cout << "A sample app to demonstrate human or hand pose detection with a pretrained OpenPose dnn." << endl;
parser.printMessage();
return 0;
}
int midx, npairs, nparts;
if (!dataset.compare("COCO")) { midx = 0; npairs = 17; nparts = 18; }
else if (!dataset.compare("MPI")) { midx = 1; npairs = 14; nparts = 16; }
else if (!dataset.compare("HAND")) { midx = 2; npairs = 20; nparts = 22; }
else
{
std::cerr << "Can't interpret dataset parameter: " << dataset << std::endl;
exit(-1);
}
// read the network model
Net net = readNet(modelBin, modelTxt);
// and the image
Mat img = imread(imageFile);
if (img.empty())
{
std::cerr << "Can't read image from the file: " << imageFile << std::endl;
exit(-1);
}
// send it through the network
Mat inputBlob = blobFromImage(img, scale, Size(W_in, H_in), Scalar(0, 0, 0), false, false);
net.setInput(inputBlob);
Mat result = net.forward();
// the result is an array of "heatmaps", the probability of a body part being in location x,y
int H = result.size[2];
int W = result.size[3];
// find the position of the body parts
vector<Point> points(22);
for (int n=0; n<nparts; n++)
{
// Slice heatmap of corresponding body's part.
Mat heatMap(H, W, CV_32F, result.ptr(0,n));
// 1 maximum per heatmap
Point p(-1,-1),pm;
double conf;
minMaxLoc(heatMap, 0, &conf, 0, &pm);
if (conf > thresh)
p = pm;
points[n] = p;
}
// connect body parts and draw it !
float SX = float(img.cols) / W;
float SY = float(img.rows) / H;
for (int n=0; n<npairs; n++)
{
// lookup 2 connected body/hand parts
Point2f a = points[POSE_PAIRS[midx][n][0]];
Point2f b = points[POSE_PAIRS[midx][n][1]];
// we did not find enough confidence before
if (a.x<=0 || a.y<=0 || b.x<=0 || b.y<=0)
continue;
// scale to image size
a.x*=SX; a.y*=SY;
b.x*=SX; b.y*=SY;
line(img, a, b, Scalar(0,200,0), 2);
circle(img, a, 3, Scalar(0,0,200), -1);
circle(img, b, 3, Scalar(0,0,200), -1);
}
imshow("OpenPose", img);
waitKey();
return 0;
}















 2486
2486











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











