







深度学习基础 - 三角函数
flyfish
图片自己绘制和引用wiki
谁的方法
欧拉将圆的半径为1,将三角放在单位圆中。赞叹他的方法吧。
谁引进的弧度
读《古今数学思想》第二卷
欧拉,1748年他在关于木星和土星运动中的不等式中给出了三角函数的系统处理。又是他1748年的《引论》中已经搞清了三角函数的周期性,并引入了角的弧度。
三角函数是他,弧度也是他。
牛顿和莱布尼茨给出了三角函数的级数展开式。
三角函数是周期函数,天文现象大都也是周期的。所以那时欧拉就用数学解决天文。
咱的正弦是怎么来的
读《数学史概论》作者:霍华德·伊夫斯 (Howard Eves)
《大测》是中国明代的一部重要的数学和天文学著作,它结合了中国传统数学和西方传入的数学知识。汤若望是一名德国耶稣会传教士,他在中国传播了欧洲的数学和天文学知识。徐光启是一位中国数学家和官员,邓玉涵、汤若望、徐光启写的《大测》书中,将正弦函数sinus被译为“正半弦”或“前半弦”,并简称为“正弦”。这个名称的选择反映了当时对正弦函数的理解。在三角形中,如果一个角的度数为θ,那么该角的正弦值是指从该角的顶点到对边的垂直距离与斜边长度的比例。在单位圆中,正弦值对应于圆周上某点的y坐标。
正半弦:这里的“正”是指直角三角形中的直角,“半”指的是弦的一半,因为在单位圆中,正弦值正好是圆周上某点到x轴的距离(即弦的一半)。
前半弦:这里的“前”可能是指弦的前端,即弦的起始点到终点的距离,这也与正弦值在单位圆中的含义相符合。
源头在哪
在查找三角函数的知识时,通常会找wiki,搜索Trigonometric functions
三角学之英文名称 Trigonometry ,
名字约定就这么叫是在公元1600年,实际源于希腊文trigono (三角) 和 metrein (测量),
其原来的意思是三角形测量(解法)
哲学的英文是Philosophy,而这个单词又是来自希腊文,是由philia 和 sophia组成,意思是爱智慧。
看,最后又是到希腊。
正题
三角形
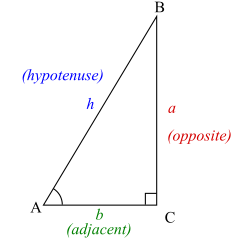
sin A = opposite(对边) hypotenuse (斜边) \sin A=\frac{\text { opposite(对边) }}{\text { hypotenuse (斜边)}} sinA= hypotenuse (斜边) opposite(对边)
cos A = adjacent(邻边) hypotenuse(斜边) \cos A=\frac{\text { adjacent(邻边) }}{\text { hypotenuse(斜边) }} cosA= hypotenuse(斜边) adjacent(邻边)
tan
A
=
opposite(对边)
adjacent(邻边)
\tan A=\frac{\text { opposite(对边) }}{\text { adjacent(邻边) }}
tanA= adjacent(邻边) opposite(对边)
重要的也就这三个
怎样算一些特殊角的三角函数值是多少?
已知:三角形内角和为
18
0
∘
180^{\circ}
180∘
如何算
3
0
∘
和
6
0
∘
30^{\circ}和60^{\circ}
30∘和60∘
需要利用勾股定理计算
先画一个等边三角形如图
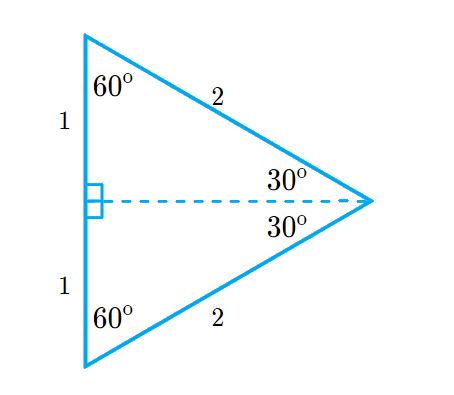
这时候取一半
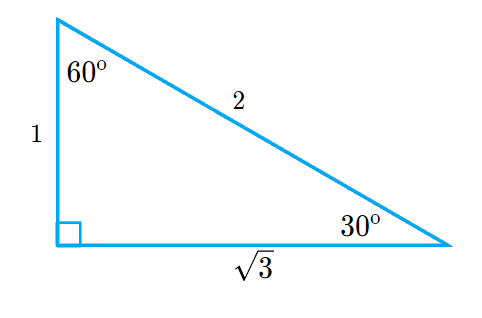
结果如下
sin
3
0
∘
=
opposite
hypotenuse
=
1
2
cos
3
0
∘
=
adjacent
j
hypotenuse
=
3
2
tan
3
0
∘
=
opposite
adjacent
=
1
3
\begin{aligned} \sin 30^{\circ} &=\frac{\operatorname{opposite}}{\operatorname{hypotenuse }}=\frac{1}{2} \\ \cos 30^{\circ} &=\frac{\operatorname{adjacent} j}{\operatorname{hypotenuse }}=\frac{\sqrt{3}}{2} \\ \tan 30^{\circ} &=\frac{\operatorname{opposite}}{\operatorname{adjacent}}=\frac{1}{\sqrt{3}} \end{aligned}
sin30∘cos30∘tan30∘=hypotenuseopposite=21=hypotenuseadjacentj=23=adjacentopposite=31
如何算
4
5
∘
45^{\circ}
45∘
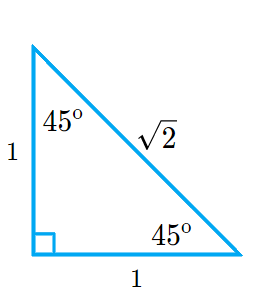
结果如下
sin
4
5
∘
=
opposite
hypotenuse
=
1
2
cos
4
5
∘
=
adjacent
hypotenuse
=
1
2
tan
4
5
∘
=
opposite
adjacent
=
1
1
=
1
\begin{aligned} \sin 45^{\circ} &=\frac{\operatorname{opposite}}{\operatorname{hypotenuse }}=\frac{1}{\sqrt{2}} \\ \cos 45^{\circ} &=\frac{\operatorname{adjacent}}{\operatorname{hypotenuse }}=\frac{1}{\sqrt{2}} \\ \tan 45^{\circ} &=\frac{\operatorname{opposite}}{\operatorname{adjacent}}=\frac{1}{1}=1 \end{aligned}
sin45∘cos45∘tan45∘=hypotenuseopposite=21=hypotenuseadjacent=21=adjacentopposite=11=1
那么
c
o
s
18
0
∘
cos180^{\circ}
cos180∘是多少?
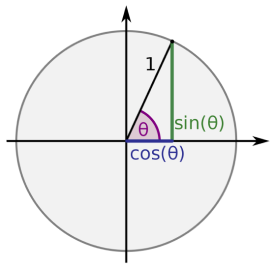
我们把半径为1的圆,叫单位圆
根据勾股定理
cos
2
(
θ
)
+
sin
2
(
θ
)
=
1
\cos ^{2}(\theta)+\sin ^{2}(\theta)=1
cos2(θ)+sin2(θ)=1
tan
θ
=
sin
θ
cos
θ
\tan \theta=\frac{\sin \theta}{\cos \theta}
tanθ=cosθsinθ
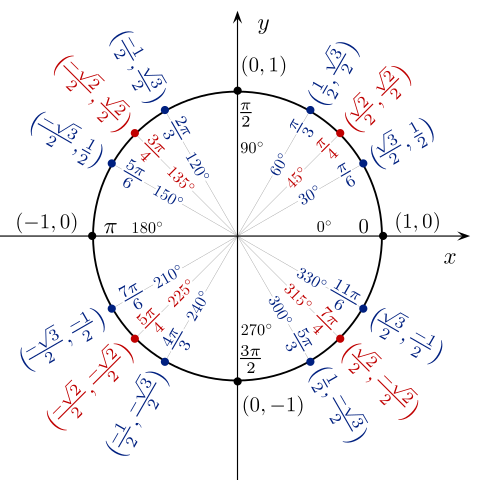
当把任意三角形放在直角坐标系里,再加上单位圆,正弦(sin)、余弦(cos)、正切(tan)就变成了单位圆上点的坐标,大于360度 也就是至少转了一周,孙悟空是逃不出如来佛五指山,还是单位圆上坐标。
看图找坐标 18 0 ∘ 180^{\circ} 180∘在x轴的负轴上,然后根据谁比谁,邻边比斜边就行 , c o s 18 0 ∘ = − 1 cos180^{\circ}=-1 cos180∘=−1。有了单位圆就变得好理解了。
弧度与角度
长度等于半径长的弧所对的圆心角叫做1弧度
换算公式
2
π
=
36
0
∘
,
1
∘
=
π
180
,
1
=
(
180
π
)
∘
≈
57.
3
∘
2 \pi=360^{\circ}, 1^{\circ}=\frac{\pi}{180}, 1=\left(\frac{180}{\pi}\right)^{\circ} \approx 57.3^{\circ}
2π=360∘,1∘=180π,1=(π180)∘≈57.3∘
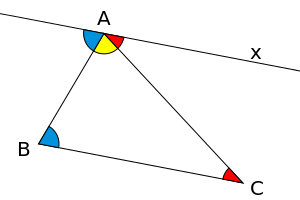
180度,为什么三角形是180度呢?
看图的证明(引用自wiki)
先说360度的事
首先从圆开始,圆的360度哪来不知道就猜。前人粗略估计天体运行规律一年划分为360天,将圆分成360份,每一份就是一度,平角就是180度。三角形的内角等于平角。那印度人还把圆周分成360×60=21600份呢!任何人都可以将圆分成任意等份。
喜帕恰斯(Hipparchus)汇编了一部自公元前8世纪在巴比伦观测到的月食总表,他采用了巴比伦的60进制书写数字,并且将黄道圈和其他的圆划分为360度。这是在迈克尔·霍斯金写的《牛津通识读本:天文学简史(中文版)》 这本书看到的。
喜帕恰斯的译名汉语里各有各的叫法。希巴恰斯、希巴克斯、依巴谷、伊巴谷等都是他的译名。
喜帕恰斯的成果在《天文学大成(Almagest)》里面记述的。有的人把这本书翻译成《至大论》,这本书是希腊天文学家托勒密(Ptolemy)编纂的天文学和数学百科全书
地心说是由经亚里士多德、托勒密他们逐渐完善起来的。托勒密认为,地球处于宇宙中心静止不动。想看看地心说流行的时代的人们是怎么思考的?
《天文学大成》我没有找到中译本,找到了《Almagest》英文版要100多US dollar。
再说180度的事,文献有记载吗?
《几何原本》
欧几里得的《几何原本》是作为当时讲解柏拉图学派必要的数学内容,作为哲学研究的预备知识。欧几里得的《几何原本》不仅奠定了欧氏几何的基础,而且其逻辑体系和证明方法对后来的数学发展产生了深远的影响。在《几何原本》的第一卷中,欧几里得提出了五个公设(也称为公理),它们是整个几何体系的基础。
公设是这个单词postulate,意思假定;要求;视…为理所当然。
几何学中,“公设”(Postulate)是指一组未经证明的基本假设或前提,它们被认为是显而易见的事实或者基础性的原则。公设通常被视为无需证明的真理,是构建更复杂的数学理论的基础。没有公设,就无法构建起逻辑上连贯的数学理论。例如,在欧几里得几何中,如果没有公设来定义直线、点、圆等基本概念以及它们之间的关系,我们就无法建立起关于这些图形的定理。
公设与定理的区别
公设:是建立数学体系的起点,是不需要证明的初始假设。公设通常是基于直观或经验观察的直接结果,它们被接受为真实的陈述。
定理:是基于公设和其他已知定理通过逻辑推理得出的结果。换句话说,定理是需要通过证明才能确立其真实性的数学命题。
从人们的经验中总结出的几何常识事实。
欧几里得几何中的公设示例
公设1:任意两点之间可以画一条直线。
公设2:任何有限的线段都可以无限延长。
公设3:以任意点为中心,以任意距离可以画一个圆。
公设4:所有直角都彼此相等。
公设5(平行公设):如果一条直线穿过两条其他直线,使得在同侧的内角之和小于两个直角,则这两条直线在那一侧无限延长后会相交。
第五公设通常被称为平行公设,这个公设实际上是在说,在一个平面内,如果一条直线穿过两条其他直线,并且这两个内角的和小于180度(即两个直角),那么这两条被穿过的直线最终会在那个方向上相交。如果这两条直线永远不会相交,则它们是平行的。
第五公设的等价命题
在《几何原本》中,平行公设并没有直接出现,而是通过一系列的命题间接地得到证实。以下是几个与平行公设相关的命题,它们与平行公设是等价的:
三角形内角和为两直角:
任意三角形的三个内角之和等于180度(即两个直角)。
所有三角形的内角和都相等:
这个命题实际上就是上面提到的三角形内角和定理,但强调了所有的三角形内角和都是相同的。
平行推论:
如果一条直线穿过两条平行线,则同位角相等,内错角相等,同旁内角互补。
唯一性:
在给定点外有一条直线时,只有一条直线可以通过该点并且与给定直线平行。
这些命题都可以通过平行公设来证明,反之亦然。例如,如果我们接受平行公设,我们可以证明任意三角形的内角和为180度;同样,如果我们假设所有三角形的内角和都等于180度,我们也可以推导出平行公设。
历史上的争议
第五公设与其他四个公设相比显得不那么直观,因此历史上有很多数学家尝试证明它是前四个公设的推论。然而,经过两千多年的努力,没有人能够成功证明这一点。直到19世纪初,非欧几何的发现表明,在不同的公理系统下,可以存在多个合理的几何体系,其中有些体系不接受平行公设,但仍然是自洽的。
谁挑战了平行公设
例如同样是读《几何原本》,那有人认为这不是常识。
罗巴切夫斯基几何(双曲几何)挑战了平行公设
尼古拉·伊万诺维奇·罗巴切夫斯基是一位俄罗斯数学家,他在19世纪初对平行公设进行了质疑。他设想了一种情况下,即使满足第五公设的条件,两条直线也不会相交,而是永远保持平行。这种几何学被称为“双曲几何”。
在双曲几何中,给定一个平面和该平面上的一条直线及直线外的一个点,存在多条直线通过这个点并且不与原直线相交。这导致了一些非直观的结论,例如三角形的内角和总是小于180度。
黎曼几何挑战了平行公设
德国数学家伯恩哈德·黎曼则提出了另一种几何学,即“黎曼几何”。在黎曼几何中,空间不再是平坦的,而是具有正曲率。这意味着在这样的空间中,即使直线遵循欧几里得几何的所有其他公设,但仍然可能相交。
在黎曼几何中,给定一个平面和该平面上的一条直线及直线外的一个点,不存在通过这个点而不与原直线相交的直线。因此,三角形的内角和总是大于180度
三角函数公式列表,包括基本定义、恒等式以及一些常见的公式
基本定义
正弦(sin):
sin
(
θ
)
=
对边
斜边
\sin(\theta) = \frac{\text{对边}}{\text{斜边}}
sin(θ)=斜边对边
余弦(cos):
cos
(
θ
)
=
邻边
斜边
\cos(\theta) = \frac{\text{邻边}}{\text{斜边}}
cos(θ)=斜边邻边
正切(tan):
tan
(
θ
)
=
对边
邻边
=
sin
(
θ
)
cos
(
θ
)
\tan(\theta) = \frac{\text{对边}}{\text{邻边}} = \frac{\sin(\theta)}{\cos(\theta)}
tan(θ)=邻边对边=cos(θ)sin(θ)
余切(cot):
cot
(
θ
)
=
1
tan
(
θ
)
=
cos
(
θ
)
sin
(
θ
)
\cot(\theta) = \frac{1}{\tan(\theta)} = \frac{\cos(\theta)}{\sin(\theta)}
cot(θ)=tan(θ)1=sin(θ)cos(θ)
正割(sec):
sec
(
θ
)
=
1
cos
(
θ
)
\sec(\theta) = \frac{1}{\cos(\theta)}
sec(θ)=cos(θ)1
余割(csc):
csc
(
θ
)
=
1
sin
(
θ
)
\csc(\theta) = \frac{1}{\sin(\theta)}
csc(θ)=sin(θ)1
角度数转换为弧度数
18
0
∘
=
π
180^\circ = \pi
180∘=π 弧度
1
∘
=
π
180
1^\circ = \frac{\pi}{180}
1∘=180π 弧度
反比恒等式
csc
(
θ
)
=
1
sin
(
θ
)
\csc(\theta) = \frac{1}{\sin(\theta)}
csc(θ)=sin(θ)1
sec
(
θ
)
=
1
cos
(
θ
)
\sec(\theta) = \frac{1}{\cos(\theta)}
sec(θ)=cos(θ)1
cot
(
θ
)
=
1
tan
(
θ
)
\cot(\theta) = \frac{1}{\tan(\theta)}
cot(θ)=tan(θ)1
sin
(
θ
)
=
1
csc
(
θ
)
\sin(\theta) = \frac{1}{\csc(\theta)}
sin(θ)=csc(θ)1
cos
(
θ
)
=
1
sec
(
θ
)
\cos(\theta) = \frac{1}{\sec(\theta)}
cos(θ)=sec(θ)1
tan
(
θ
)
=
1
cot
(
θ
)
\tan(\theta) = \frac{1}{\cot(\theta)}
tan(θ)=cot(θ)1
平方恒等式
sin
2
(
θ
)
+
cos
2
(
θ
)
=
1
\sin^2(\theta) + \cos^2(\theta) = 1
sin2(θ)+cos2(θ)=1
1
+
tan
2
(
θ
)
=
sec
2
(
θ
)
1 + \tan^2(\theta) = \sec^2(\theta)
1+tan2(θ)=sec2(θ)
1
+
cot
2
(
θ
)
=
csc
2
(
θ
)
1 + \cot^2(\theta) = \csc^2(\theta)
1+cot2(θ)=csc2(θ)
角和公式
sin
(
α
+
β
)
=
sin
(
α
)
cos
(
β
)
+
cos
(
α
)
sin
(
β
)
\sin(\alpha + \beta) = \sin(\alpha)\cos(\beta) + \cos(\alpha)\sin(\beta)
sin(α+β)=sin(α)cos(β)+cos(α)sin(β)
sin
(
α
−
β
)
=
sin
(
α
)
cos
(
β
)
−
cos
(
α
)
sin
(
β
)
\sin(\alpha - \beta) = \sin(\alpha)\cos(\beta) - \cos(\alpha)\sin(\beta)
sin(α−β)=sin(α)cos(β)−cos(α)sin(β)
cos
(
α
+
β
)
=
cos
(
α
)
cos
(
β
)
−
sin
(
α
)
sin
(
β
)
\cos(\alpha + \beta) = \cos(\alpha)\cos(\beta) - \sin(\alpha)\sin(\beta)
cos(α+β)=cos(α)cos(β)−sin(α)sin(β)
cos
(
α
−
β
)
=
cos
(
α
)
cos
(
β
)
+
sin
(
α
)
sin
(
β
)
\cos(\alpha - \beta) = \cos(\alpha)\cos(\beta) + \sin(\alpha)\sin(\beta)
cos(α−β)=cos(α)cos(β)+sin(α)sin(β)
tan
(
α
+
β
)
=
tan
(
α
)
+
tan
(
β
)
1
−
tan
(
α
)
tan
(
β
)
\tan(\alpha + \beta) = \frac{\tan(\alpha) + \tan(\beta)}{1 - \tan(\alpha)\tan(\beta)}
tan(α+β)=1−tan(α)tan(β)tan(α)+tan(β)
tan
(
α
−
β
)
=
tan
(
α
)
−
tan
(
β
)
1
+
tan
(
α
)
tan
(
β
)
\tan(\alpha - \beta) = \frac{\tan(\alpha) - \tan(\beta)}{1 + \tan(\alpha)\tan(\beta)}
tan(α−β)=1+tan(α)tan(β)tan(α)−tan(β)
角差公式
sin
(
α
)
+
sin
(
β
)
=
2
sin
(
α
+
β
2
)
cos
(
α
−
β
2
)
\sin(\alpha) + \sin(\beta) = 2\sin\left(\frac{\alpha + \beta}{2}\right)\cos\left(\frac{\alpha - \beta}{2}\right)
sin(α)+sin(β)=2sin(2α+β)cos(2α−β)
sin
(
α
)
−
sin
(
β
)
=
2
cos
(
α
+
β
2
)
sin
(
α
−
β
2
)
\sin(\alpha) - \sin(\beta) = 2\cos\left(\frac{\alpha + \beta}{2}\right)\sin\left(\frac{\alpha - \beta}{2}\right)
sin(α)−sin(β)=2cos(2α+β)sin(2α−β)
cos
(
α
)
+
cos
(
β
)
=
2
cos
(
α
+
β
2
)
cos
(
α
−
β
2
)
\cos(\alpha) + \cos(\beta) = 2\cos\left(\frac{\alpha + \beta}{2}\right)\cos\left(\frac{\alpha - \beta}{2}\right)
cos(α)+cos(β)=2cos(2α+β)cos(2α−β)
cos
(
α
)
−
cos
(
β
)
=
−
2
sin
(
α
+
β
2
)
sin
(
α
−
β
2
)
\cos(\alpha) - \cos(\beta) = -2\sin\left(\frac{\alpha + \beta}{2}\right)\sin\left(\frac{\alpha - \beta}{2}\right)
cos(α)−cos(β)=−2sin(2α+β)sin(2α−β)
角倍角公式
sin
(
2
θ
)
=
2
sin
(
θ
)
cos
(
θ
)
\sin(2\theta) = 2\sin(\theta)\cos(\theta)
sin(2θ)=2sin(θ)cos(θ)
cos
(
2
θ
)
=
cos
2
(
θ
)
−
sin
2
(
θ
)
=
2
cos
2
(
θ
)
−
1
=
1
−
2
sin
2
(
θ
)
\cos(2\theta) = \cos^2(\theta) - \sin^2(\theta) = 2\cos^2(\theta) - 1 = 1 - 2\sin^2(\theta)
cos(2θ)=cos2(θ)−sin2(θ)=2cos2(θ)−1=1−2sin2(θ)
tan
(
2
θ
)
=
2
tan
(
θ
)
1
−
tan
2
(
θ
)
\tan(2\theta) = \frac{2\tan(\theta)}{1 - \tan^2(\theta)}
tan(2θ)=1−tan2(θ)2tan(θ)
角半角公式
sin
2
(
θ
/
2
)
=
1
−
cos
(
θ
)
2
\sin^2(\theta/2) = \frac{1 - \cos(\theta)}{2}
sin2(θ/2)=21−cos(θ)
cos
2
(
θ
/
2
)
=
1
+
cos
(
θ
)
2
\cos^2(\theta/2) = \frac{1 + \cos(\theta)}{2}
cos2(θ/2)=21+cos(θ)
tan
(
θ
/
2
)
=
±
1
−
cos
(
θ
)
1
+
cos
(
θ
)
=
sin
(
θ
)
1
+
cos
(
θ
)
=
1
−
cos
(
θ
)
sin
(
θ
)
\tan(\theta/2) = \pm\sqrt{\frac{1 - \cos(\theta)}{1 + \cos(\theta)}} = \frac{\sin(\theta)}{1 + \cos(\theta)} = \frac{1 - \cos(\theta)}{\sin(\theta)}
tan(θ/2)=±1+cos(θ)1−cos(θ)=1+cos(θ)sin(θ)=sin(θ)1−cos(θ)


















 3376
3376

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











