







研究思路:
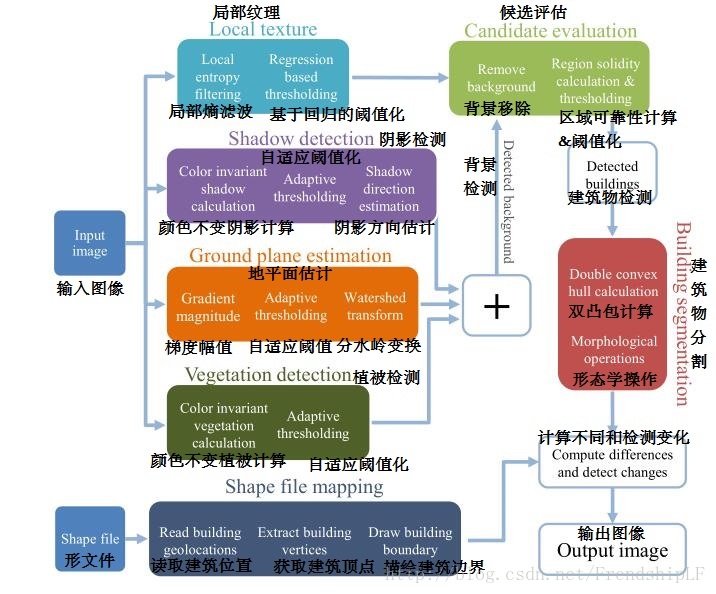
研究框架:
1:自适应阈值处理
1.1:熵滤波
建筑物检测算法的第一步是检测图像中的纹理,该纹理可能表示建筑物的屋顶。计算该图像中所有像素的局部熵强度,以此来确定具有建筑物屋顶特征的光滑纹理的区域。灰度图像中给定像素的熵E定义为:
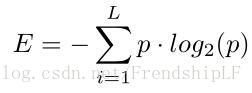
其中L是相邻像素的个数,p是邻域中像素值的出现次数。
由于建筑物区域相较于背景区域,比如:植被或其他人造结构,有着相对较低的熵值。因此,通过阈值化图像的熵值可以得到图像的低熵值区域。
1.2:自适应阈值处理
在本研究中,我们提出了一种基于二次回归和随机抽样一致性的自适应阈值技术。这种技术允许我们的算法对数据集中每张图像进行熵特性的自适应。具体而言,将测试图像中的熵的平均值和标准偏差与在给定训练集上通过手动测试阈值确定的二次模型进行比较。在执行基于二次回归的方法之前,我们在采集的熵特性上进行随机抽样一致性可以消除异常点。
2:背景检测
为了完善检测结果,从建筑物候选区域检测并减去代表背景区域(比如:植被、阴影和地平面)。
2.1:植被检测
我们假设所有建筑物区域不会在屋顶上有植被,因此我们可以从建筑物候选区域中检测和减去图像中的植被区域。通过使用图像绿色通道和图像所有颜色通道数目之间的关系,植被密度可以计算为:
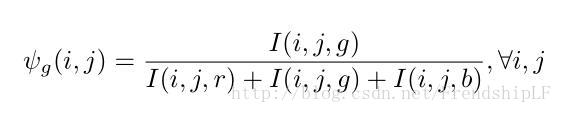
这里ψg(i,j)是每个像素的植被强度,I 是图像三通道红(r)、绿(g)和蓝(b)的强度,I ∈{1,2,…,m }和J∈{1,2,…,n}代表第i行和第j列图像。M和N表示各自的行和列。为了建立二值化图像来表示图像中的植被区域,Otsu自动阈值化方法被用于找到适值,来阈值化植被密度。
2.3 阴影检测
在图像处理中,采用基于颜色通道的方法来检测阴影区域。场景中的阴影强度可以计算为:

这里,ψs(i,j)表示每个像素的阴影强度。为了找到二值化的阴影区域,Otsu自动阈值化方法再次被用于寻找适值来阈值化处理阴影强度。
2.3地平面估计
为了进一步减少建筑物候选区域之间的假阳性检测的影像,我们估计场景的地平面。这种技术尤其有用,因为道路和一些草地区域的熵特征与真实建筑物的屋顶的熵特性具有相似性。通过检测地平面区域并从检测到的建筑物区域中减去它们,我们可以消除更多的假阳性检测。
分水岭分割方法被用于创建可识别地平面区域的分割,这些区域被假定分割为最大区域。通过阈值化处理每个分水岭分割区域包围盒的宽和高,我们可以找到最大区域。然后,从建筑物候选区域减去这些区域,以排除可能代表道路和地面区域的假阳性。
3:建筑物候选区域评估
3.1:稳健滤波
在基于建筑物的形状上,稳健阈值化被用于细化建筑物候选区域。对比于矩形形状建筑物的高稳健性,低稳健性的区域不太可能是真的建筑物。我们定义稳健性为建筑物候选区域面积与建筑物区域凸包面积之比。我们使用这种技术的目的是为了减少低熵不规则形状区域的假阳性检测的数量,否则这些区域会被检测为建筑候选区域。这就要求检测的建筑物大多在形状上是矩形的,这样的建筑物区域会产生很高的稳健值。
3.2:阴影角滤波
为了进一步减少建筑物候选集的假阳性,阴影角度进行滤波消除不像一个真正的建筑物那样投射阴影的候选区域。由于在这项研究中,由于二维图像中没有高程信息,所以只能根据它们与阴影的联系来估计高程区域。由于所有的建筑物都在地面之上,所以它们都会在建筑物和太阳之间的相反方向上投射阴影。如果与阴影相连,那么虚假建筑候选区域可能会被提高,但如果建筑候选区域和影子之间的角度与大多数建筑候选区域不匹配,那么它们可能会被淘汰。
为了计算阴影角,建筑物阴影的方向首先必须在一个区域内进行估计。多数投票法被用来选择正确的阴影角。为了确定一个有效的阴影角,所有建筑物候选区域的角度在一个特定的公差范围内进行阈值化处理。任何与阴影区域没有直接联系的或在有效角度范围之外有阴影角的建筑候选区域都被淘汰。
4:建筑物分割
该算法检测的建筑候选区域已被细化,以去除许多非建筑区域,但它们的分割可能不精确是由于屋顶区域的细节,如:区划、窗户、通风设备或其他将导致一个局部的高熵区域的细节。为了从这些候选区域中恢复更精确的分割,我们采用凸包和形态学运算相结合的方法。
第一个凸包操首先被用于关闭单个屋顶分割区域内的任何缺口,然后使用形态学闭操作将附近的屋顶分割区域结合在一起,第二个凸包操被用于关闭任何新连接的屋顶分割区域之间的缺口。通过使用这种方法,能够更精确地将可以分别识别的屋顶分割区域和被检测的建筑物面积结合在一起。
5:建筑物变化检测
在得到最后分割后的建筑物候选区域之后,将该图像的检测与上一次的建筑物区域进行比较。只存在于前一次而不是在当前图像中的区域被标记为已被破坏、仅在当前图像中存在的区域,而不是在前一次的被标记为新的区域、存在于两个时期的区域被标记为未变化的区域。
所有被标记为已被破坏的建筑区域都会被算法重新审视,以确保它们不是建造区域以避免潜在的假阴性检测。具体而言,从检测算法中识别出的前一段时间的区域,从当前时间的背景检测中检测。如果这些区域被确定为在当前背景区,然后他们被标记为已被破坏。如果没有,他们将被重新界定并且添加到当前建筑区域检测。这种技术允许在变化检测中更精确地考虑具有高熵纹理的屋顶建筑物。














 66
66











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









