







 本文深入探讨连续时不变系统(LTI)的微分方程表示与解法,涵盖冲激与阶跃响应,详解卷积积分及其实用性质,最终引入微分算子与传输算子概念,为信号系统学习提供扎实基础。
本文深入探讨连续时不变系统(LTI)的微分方程表示与解法,涵盖冲激与阶跃响应,详解卷积积分及其实用性质,最终引入微分算子与传输算子概念,为信号系统学习提供扎实基础。
信号系统笔记(二)连续系统的时域分析
2 连续系统的时域分析
从这一章开始,知识变得难起来了,学着有点让人头秃,不过慢慢来,一步一个脚印。
2.1 连续系统的响应
2.1.1 连续系统建立微分方程
根据之前提到的知识,系统,本质是可以理解成一个“函数”,给定一个输入,然后得到输出。函数体一般为微分方程,如电路图:
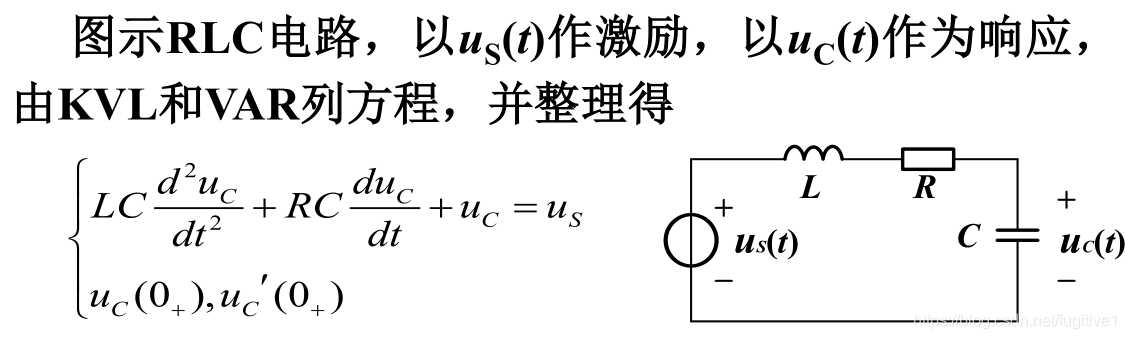
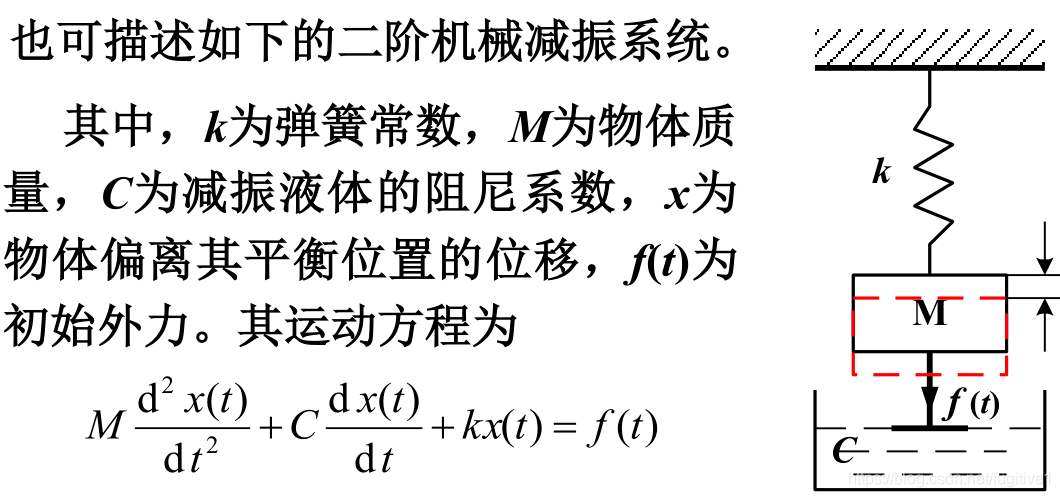
该方程为二阶线性微分方程,当然,不只是,电路图,其他系统也可以用微分方程来描述:
2.1.2 微分方程的模拟框图
我目前觉得,引入微分方程的模拟框图,是为了更加明确输入跟输出。二阶线性微分方程的一般形式如下:
y
′
′
(
t
)
+
a
1
y
′
(
t
)
+
a
0
y
(
t
)
=
f
(
t
)
y''(t)+a_1y'(t)+a_0y(t)=f(t)
y′′(t)+a1y′(t)+a0y(t)=f(t)
其中
f
(
t
)
f(t)
f(t)为系统的输入,
y
(
t
)
y(t)
y(t)为系统的输出。方程左边为系统的模型(类比于函数体),右边为输入函数(类比于函数输入值)。
可以由三种基本运算来描述一个系:相加、积分、数乘,分别对应框图中的,加法器、积分器、数乘器。

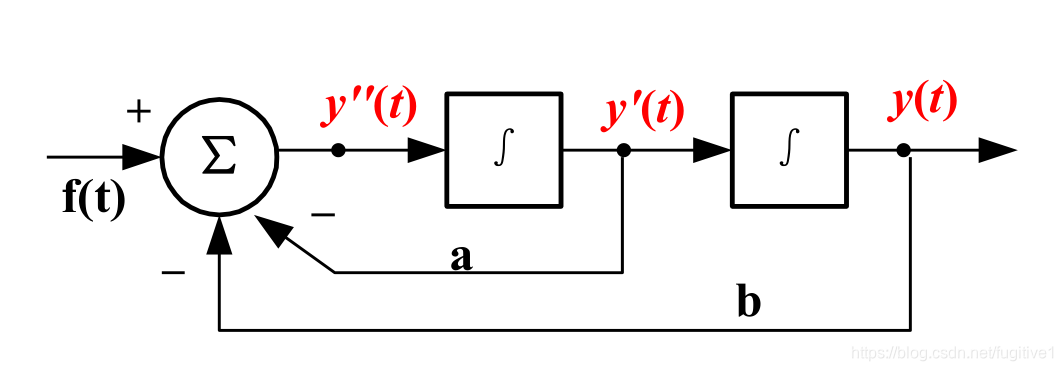
以下是实例解释微分方程框图的画法,如系统:
y
′
′
(
t
)
+
a
y
′
(
t
)
+
b
y
(
t
)
=
f
(
t
)
y''(t)+ay'(t)+by(t)=f(t)
y′′(t)+ay′(t)+by(t)=f(t),化为框图的步骤:
- 将方程变形为: y ′ ′ ( t ) = f ( t ) − a y ′ ( t ) − b y ( t ) y''(t)=f(t)-ay'(t)-by(t) y′′(t)=f(t)−ay′(t)−by(t)
- 画出两个积分器:
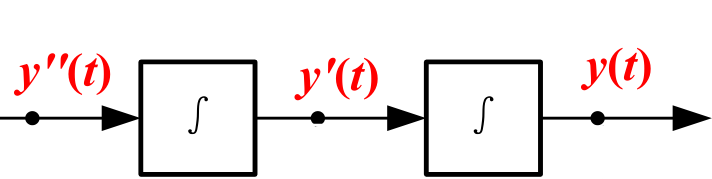
- 然后按照第一步的方程拼接
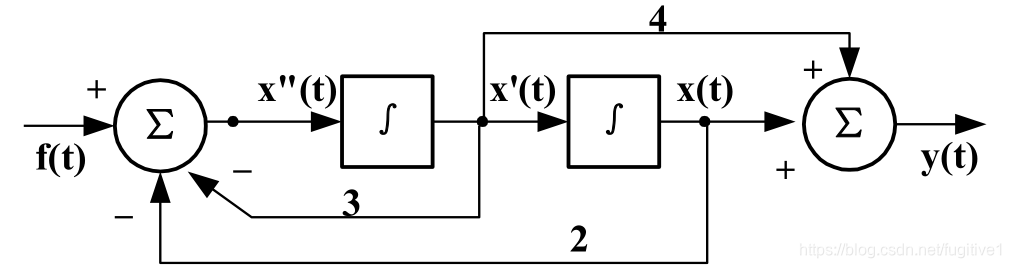
当输入中也含有微分的情况下,如系统: y ′ ′ ( t ) + 3 y ′ ( t ) + 2 y ( t ) = 4 f ′ ( t ) + f ( t ) y''(t)+3y'(t)+2y(t)=4f'(t)+f(t) y′′(t)+3y′(t)+2y(t)=4f′(t)+f(t),画框图需要引进辅助函数: x ′ ′ ( t ) + 3 x ′ ( t ) + 2 x ( t ) = f ( t ) x''(t)+3x'(t)+2x(t)=f(t) x′′(t)+3x′(t)+2x(t)=f(t),这个函数的系统跟上面那个系统一样,只不过输入为 f ( t ) f(t) f(t),输出为 x ( t ) x(t) x(t)。
由于是LTI系统,因此系统具线性,即: f ( t ) → x ( t ) f(t) \to x(t) f(t)→x(t), f ′ ( t ) → x ′ ( t ) f'(t) \to x'(t) f′(t)→x′(t), f ( t ) + 4 f ′ ( t ) → x ( t ) + x f ′ ( t ) = y ( t ) f(t)+4f'(t) \to x(t)+xf'(t)=y(t) f(t)+4f′(t)→x(t)+xf′(t)=y(t)
当然,框图跟方程可以互相转换,如下框图:
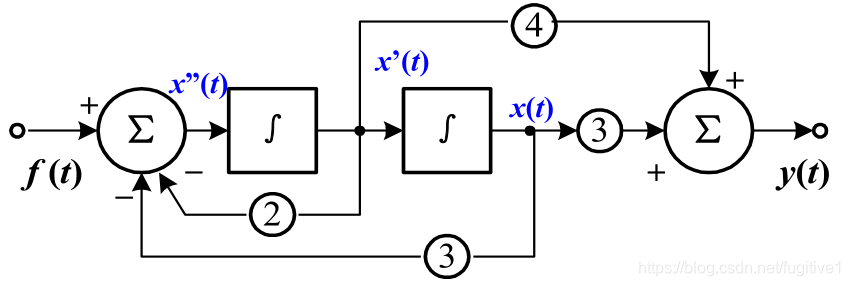
可以转换为方程: y ′ ′ ( t ) + 2 y ′ ( t ) + 3 y ( t ) = 3 f ( t ) + 4 f ′ ( t ) y''(t)+2y'(t)+3y(t)=3f(t)+4f'(t) y′′(t)+2y′(t)+3y(t)=3f(t)+4f′(t)
2.1.3 微分方程的经典解法
关于微分方程的经典解法,在学高等数学的时候就很懵逼,不知其原理只知其解法步骤,因为只知道解法步骤就足够了。一般来说,解法如下图所示:
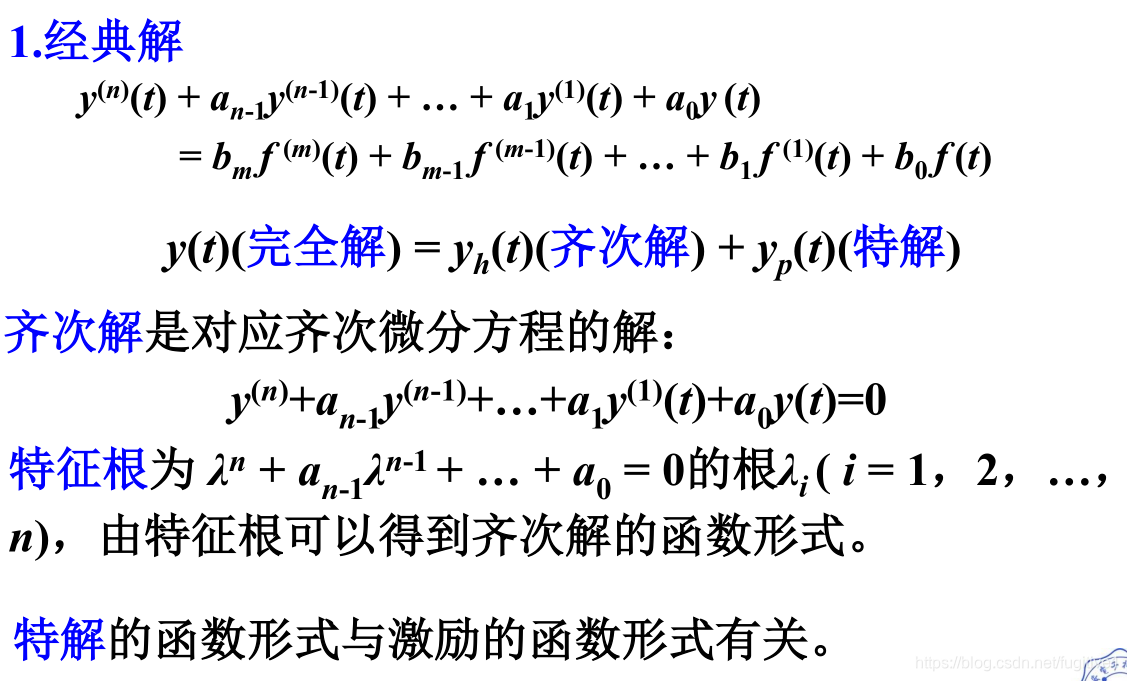
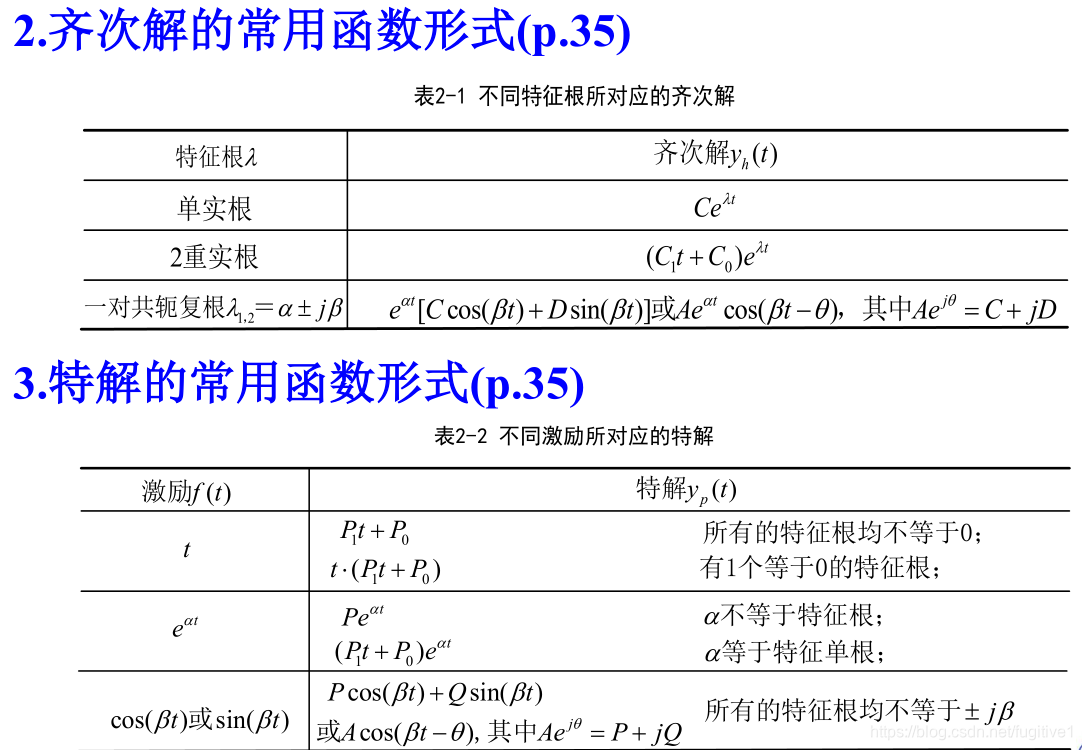
其中,二阶线性微分方程的解法如下:
2.1.4 连续系统的初始值
初始值是
n
n
n阶系统在
t
=
0
t=0
t=0时接入系统的时候,其响应在
t
=
0
+
t=0_+
t=0+时刻的值,即
y
(
j
)
(
0
+
)
(
j
=
0
,
1
,
.
.
.
,
n
−
1
)
y^{(j)}(0_+)(j=0,1,...,n-1)
y(j)(0+)(j=0,1,...,n−1)。
初始状态是指系统在激励未接入的
t
=
0
−
t=0_-
t=0−时刻的响应值
y
(
j
)
(
0
−
)
y^{(j)}(0_-)
y(j)(0−),这个值反映了系统的历史情况,与激励无关系。
一般来说,需要从初始状态求得初始值,即:
y
(
j
)
(
0
−
)
→
y
(
j
)
(
0
+
)
y^{(j)}(0_-) \to y^{(j)}(0_+)
y(j)(0−)→y(j)(0+)。
例如:
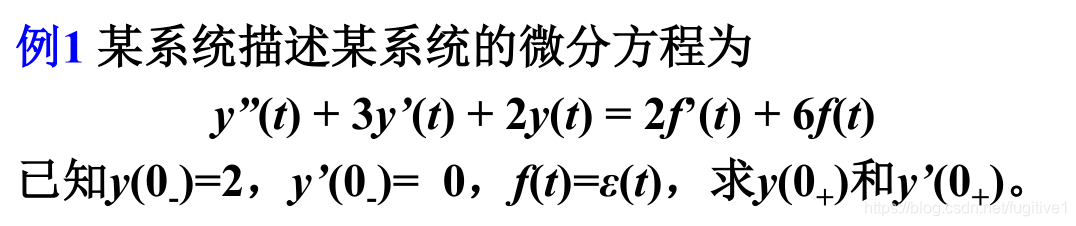
带入输入信号得到:
y
′
′
(
t
)
+
3
y
′
(
t
)
+
2
y
(
t
)
=
2
δ
(
t
)
+
6
ε
(
t
)
y''(t)+3y'(t)+2y(t)=2\delta(t)+6\varepsilon(t)
y′′(t)+3y′(t)+2y(t)=2δ(t)+6ε(t),观察此方程,右边含有
δ
(
t
)
\delta(t)
δ(t),说明
y
′
′
(
t
)
y''(t)
y′′(t)中含有
δ
(
t
)
\delta(t)
δ(t),因为如果
y
′
(
t
)
y'(t)
y′(t)含有
δ
(
t
)
\delta(t)
δ(t)的话,那么
y
′
′
(
t
)
y''(t)
y′′(t)中必含有
δ
′
(
t
)
\delta'(t)
δ′(t),但是等式右边不含有
δ
′
(
t
)
\delta'(t)
δ′(t)。
PS:这里可能会考虑到为什么等式右边没有对应到
y
(
t
)
y(t)
y(t),
y
′
′
(
t
)
y''(t)
y′′(t)必含有
δ
(
t
)
\delta(t)
δ(t),则:
y
′
(
t
)
y'(t)
y′(t)必含有
ε
(
t
)
\varepsilon(t)
ε(t),那么
y
(
t
)
y(t)
y(t)必含有
ε
(
t
)
\varepsilon(t)
ε(t)的积分,这个在等式右边没有体现,我没想清楚为什么。
按照上面的思路,
y
′
′
(
t
)
y''(t)
y′′(t)中含有
δ
(
t
)
\delta(t)
δ(t),
y
′
(
t
)
y'(t)
y′(t)含有
ε
(
t
)
\varepsilon(t)
ε(t),因此有:
y
′
(
0
−
)
≠
y
′
(
0
+
)
y'(0_-) \neq y'(0_+)
y′(0−)=y′(0+),
y
(
0
−
)
=
y
(
0
+
)
=
2
y(0_-)=y(0_+)=2
y(0−)=y(0+)=2。对等式两边同时求
0
−
→
0
+
0_-\to0_+
0−→0+的积分得到:
∫
0
−
0
+
y
′
′
(
t
)
d
t
+
3
∫
0
−
0
+
y
′
(
t
)
d
t
+
2
∫
0
−
0
+
y
(
t
)
d
t
=
2
∫
0
−
0
+
δ
(
t
)
d
t
+
6
∫
0
−
0
+
ε
(
t
)
d
t
\int_{0_-}^{0_+}y''(t){\rm d}t+3\int_{0_-}^{0_+}y'(t){\rm d}t+2\int_{0_-}^{0_+}y(t){\rm d}t=2\int_{0_-}^{0_+}\delta(t){\rm d}t+6\int_{0_-}^{0_+}\varepsilon(t){\rm d}t
∫0−0+y′′(t)dt+3∫0−0+y′(t)dt+2∫0−0+y(t)dt=2∫0−0+δ(t)dt+6∫0−0+ε(t)dt
y
′
(
0
+
)
−
y
′
(
0
−
)
=
2
y'(0_+)-y'(0_-)=2
y′(0+)−y′(0−)=2
因此得到:
y
(
0
+
)
=
2
,
y
′
(
0
+
)
=
2
y(0_+)=2,y'(0_+)=2
y(0+)=2,y′(0+)=2
结论:微分方程等号右端含有
δ
(
t
)
\delta(t)
δ(t) 时 , 仅在等号左端
y
(
t
)
y(t)
y(t)的最高阶导数中含有
δ
(
t
)
\delta(t)
δ(t) , 则
y
(
t
)
y(t)
y(t) 的次高阶跃变 , 其余连续;若右端不含冲激函数 , 则不会跃变。
2.1.5 零输入响应
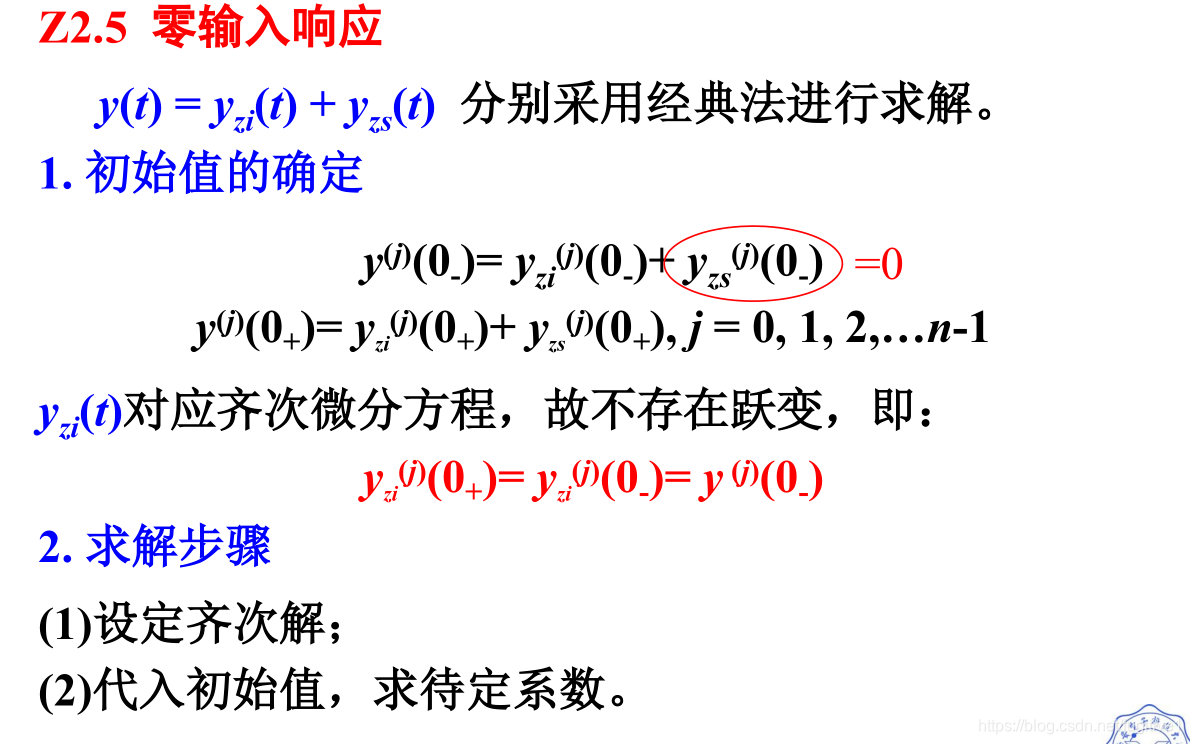
例题:
该系统为零输入响应,则有:
y
′
′
(
t
)
+
3
y
′
(
t
)
+
2
y
(
t
)
=
0
y''(t)+3y'(t)+2y(t)=0
y′′(t)+3y′(t)+2y(t)=0
y
(
0
−
)
=
y
(
0
+
)
=
2
,
y
′
(
0
−
)
=
y
′
(
0
+
)
=
0
y(0_-)=y(0_+)=2,y'(0_-)=y'(0_+)=0
y(0−)=y(0+)=2,y′(0−)=y′(0+)=0
该方程是个齐次微分方程,特征方程为
r
2
+
3
r
+
2
=
0
r^2+3r+2=0
r2+3r+2=0,
r
1
=
−
1
,
r
2
=
−
2
r_1=-1,r_2=-2
r1=−1,r2=−2。因此设定通解为:
y
(
t
)
=
C
1
e
−
t
+
C
2
e
−
2
t
y(t)=C_1e^{-t}+C_2e^{-2t}
y(t)=C1e−t+C2e−2t,带入值解得零输入响应为:
y
(
t
)
=
4
e
−
t
−
2
e
−
2
t
y(t)=4e^{-t}-2e^{-2t}
y(t)=4e−t−2e−2t
2.1.6 零状态响应
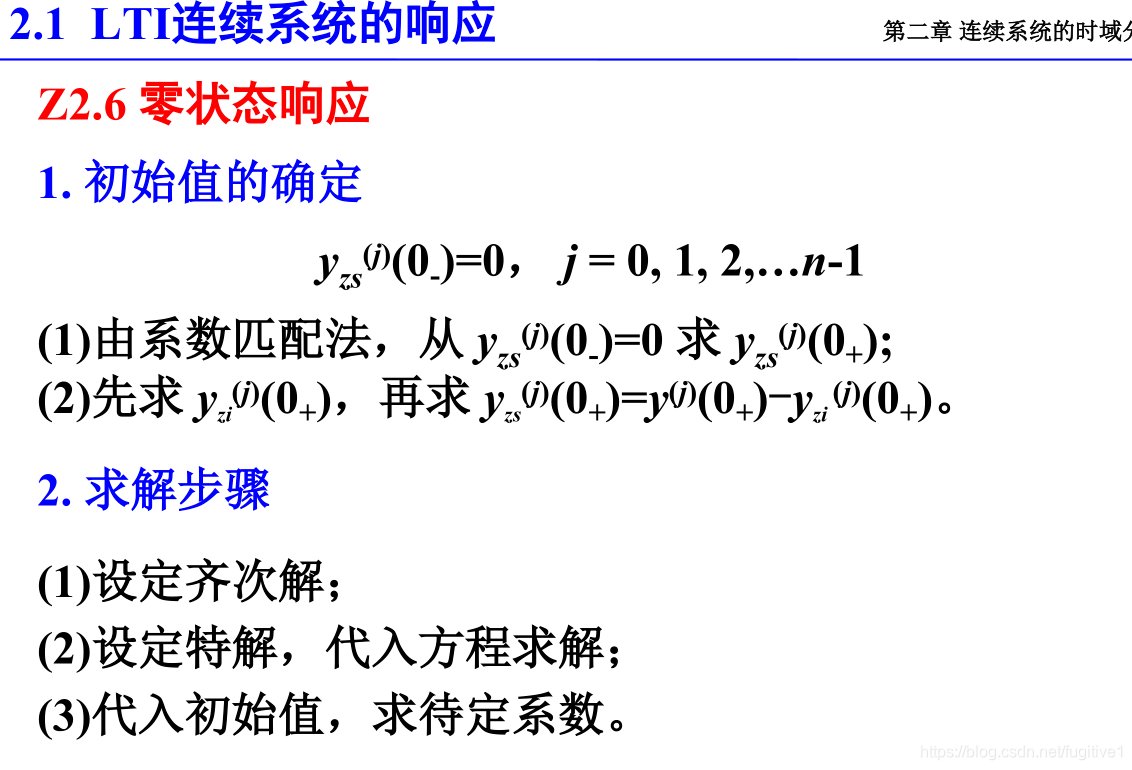
例题:
零输入响应跟上面一样,零状态响应求法如下,根据零状态响应的特质,可以得到:
y
z
s
(
0
−
)
=
0
,
y
z
s
′
(
0
−
)
=
0
y_{zs}(0_-)=0,y'_{zs}(0_-)=0
yzs(0−)=0,yzs′(0−)=0,现在要求
y
z
s
(
0
+
)
,
y
z
s
′
(
0
+
)
y_{zs}(0_+),y'_{zs}(0_+)
yzs(0+),yzs′(0+)。原微分方程化为:
y
′
′
(
t
)
+
3
y
′
(
t
)
+
2
y
(
t
)
=
2
δ
(
t
)
+
6
ε
(
t
)
y''(t)+3y'(t)+2y(t)=2\delta(t)+6\varepsilon(t)
y′′(t)+3y′(t)+2y(t)=2δ(t)+6ε(t)
由匹配法知(见2.1.4节):
y
z
s
(
0
−
)
=
y
z
s
(
0
+
)
=
0
,
y
z
s
′
(
0
+
)
=
2
y_{zs}(0_-)=y_{zs}(0_+)=0,y'_{zs}(0_+)=2
yzs(0−)=yzs(0+)=0,yzs′(0+)=2
当
t
>
0
t>0
t>0时,
y
′
′
(
t
)
+
3
y
′
(
t
)
+
2
y
(
t
)
=
6
y''(t)+3y'(t)+2y(t)=6
y′′(t)+3y′(t)+2y(t)=6
齐次方程的通解为:
y
z
s
h
(
t
)
=
C
1
e
−
t
+
C
2
e
−
2
t
y_{zsh}(t)=C_1e^{-t}+C_2e^{-2t}
yzsh(t)=C1e−t+C2e−2t解得:
y
z
s
h
(
t
)
=
−
4
e
−
t
+
e
−
2
t
y_{zsh}(t)=-4e^{-t}+e^{-2t}
yzsh(t)=−4e−t+e−2t
设定特解为:
y
z
s
p
(
t
)
=
p
y_{zsp}(t)=p
yzsp(t)=p,带入方程解得
p
=
3
p=3
p=3解得零状态响应为:
y
z
s
(
t
)
=
−
4
e
−
t
+
e
−
2
t
+
3
y_{zs}(t)=-4e^{-t}+e^{-2t}+3
yzs(t)=−4e−t+e−2t+3
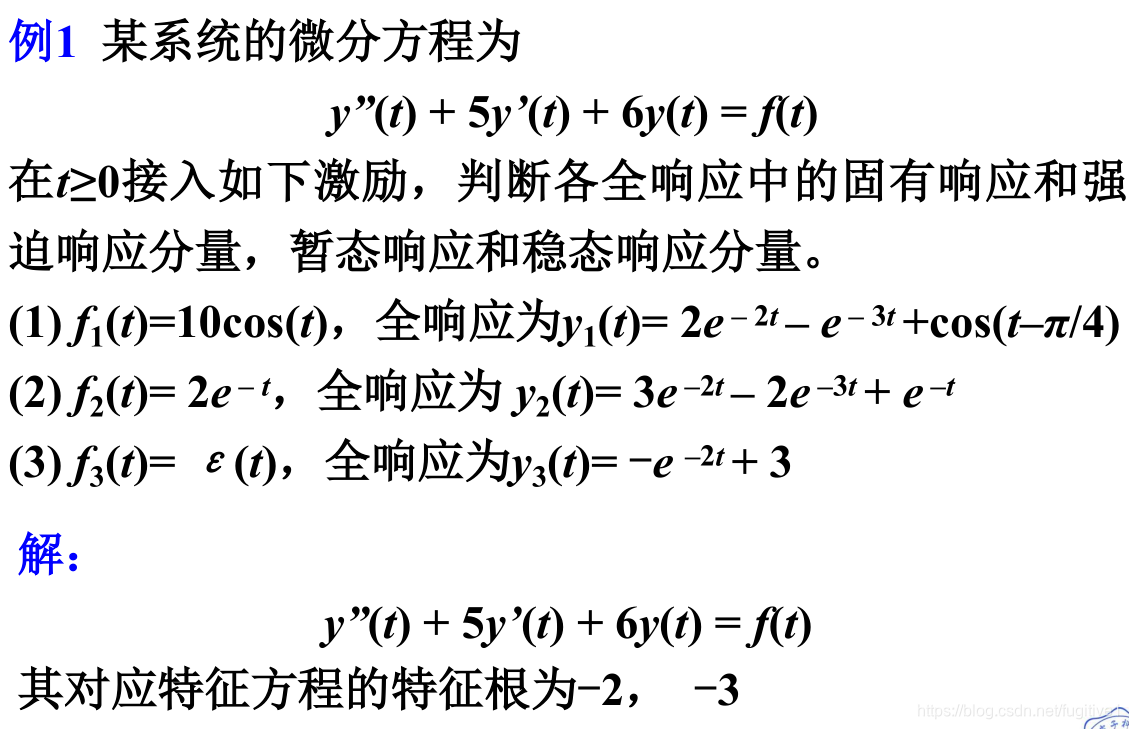
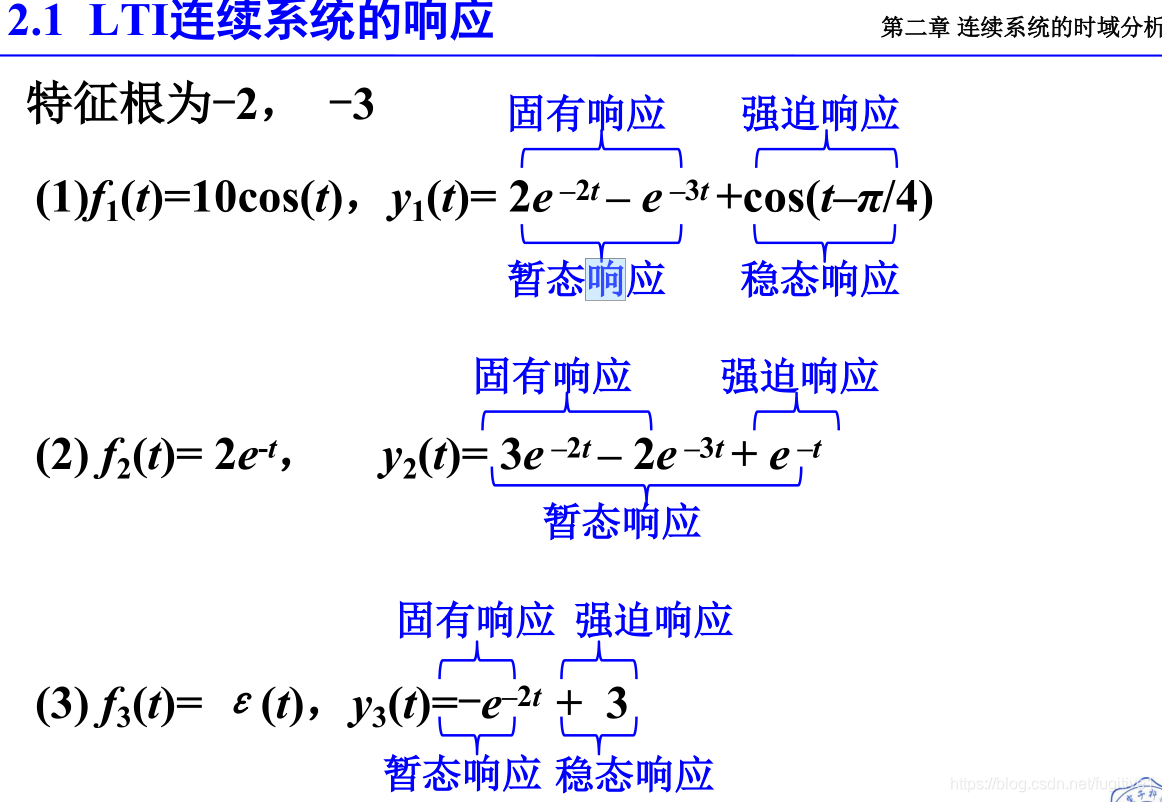
2.1.7 响应分类
2.2 冲激响应与阶跃响应
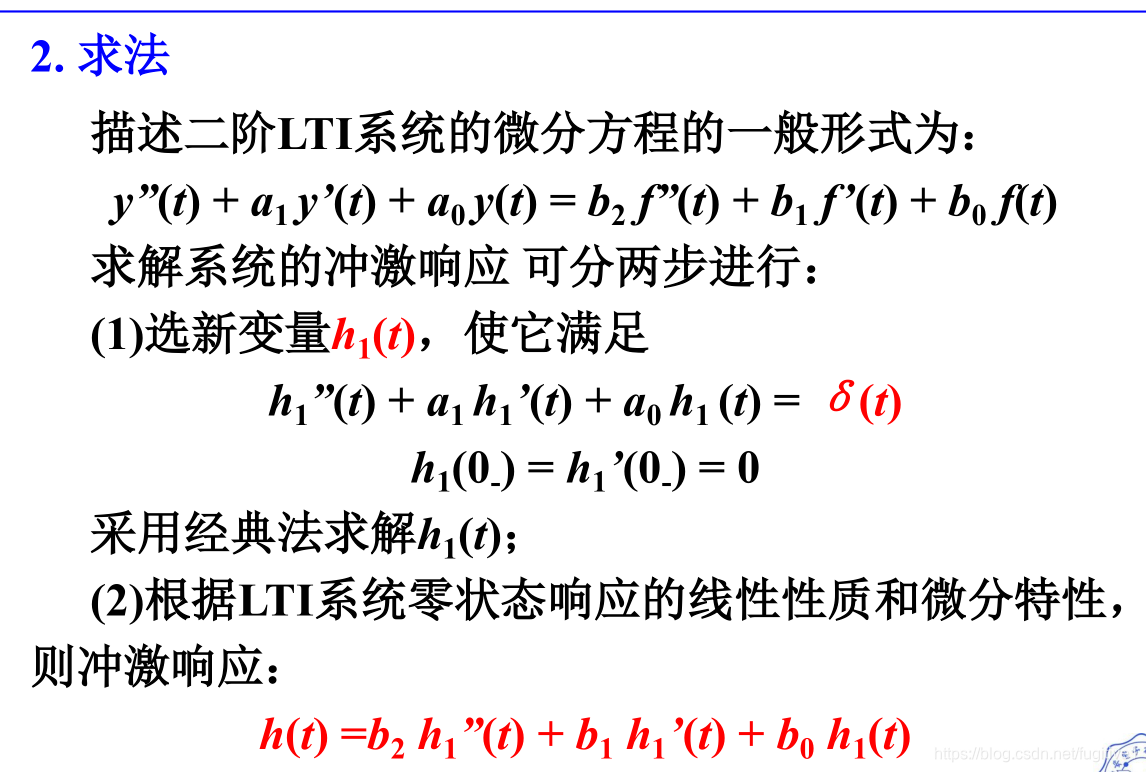
2.2.1 冲激响应及其求法
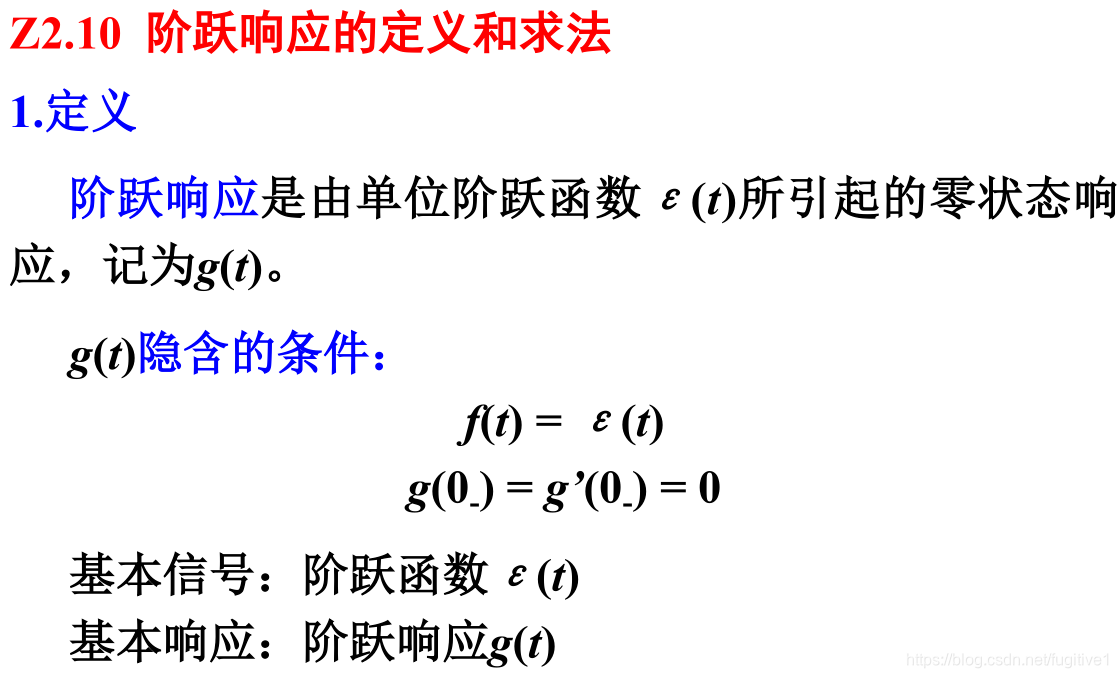
冲激响应是由单位冲激函数
δ
(
t
)
\delta(t)
δ(t)所引起的零状态响应,记为
h
(
t
)
h(t)
h(t)。
h
(
t
)
h(t)
h(t)隐含的条件:
f
(
t
)
=
δ
(
t
)
f(t)=\delta(t)
f(t)=δ(t)
h
(
0
−
)
=
h
′
(
0
−
)
=
0
h(0_-)=h'(0_-)=0
h(0−)=h′(0−)=0
其中第二个条件是所有二阶零状态响应都成立。
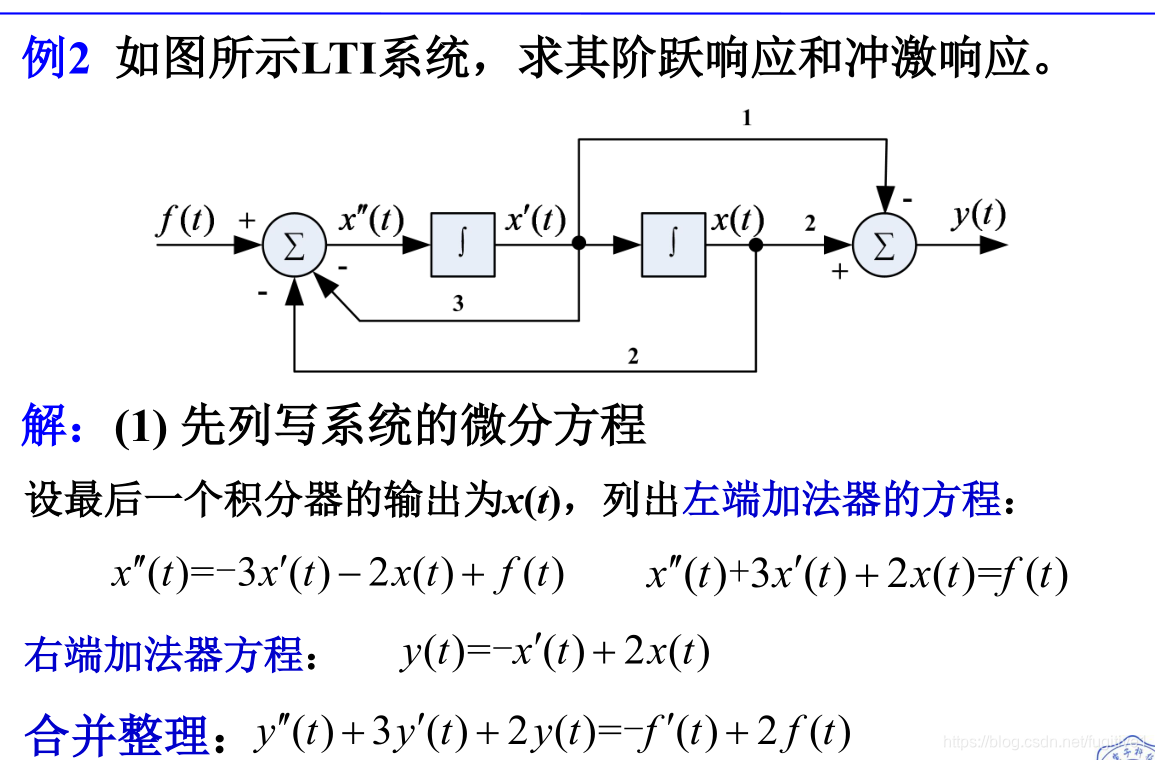
例题如下:
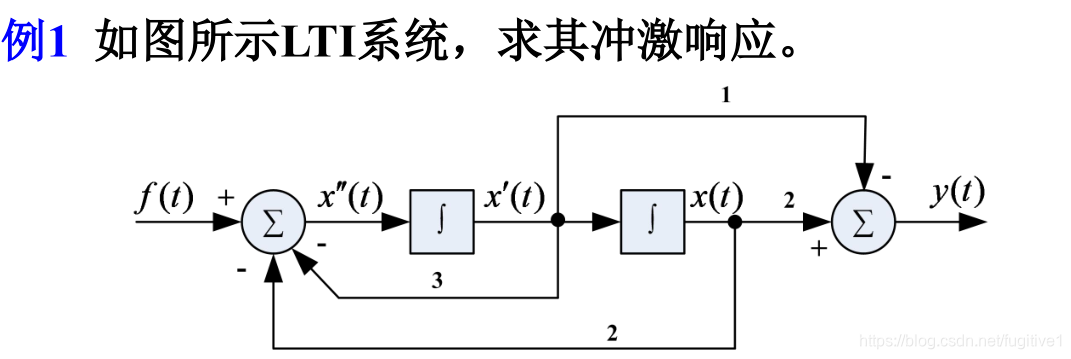
先求其系统的方程:
x
′
′
(
t
)
=
f
(
t
)
−
2
x
(
t
)
−
3
x
′
(
t
)
→
x
′
′
(
t
)
+
3
x
′
(
t
)
+
2
x
(
t
)
=
f
(
t
)
x''(t)=f(t)-2x(t)-3x'(t) \to x''(t)+3x'(t)+2x(t)=f(t)
x′′(t)=f(t)−2x(t)−3x′(t)→x′′(t)+3x′(t)+2x(t)=f(t),系统方程为:
y
′
′
(
t
)
+
3
y
′
(
t
)
+
2
y
(
t
)
=
−
f
′
(
t
)
+
2
f
(
t
)
y''(t)+3y'(t)+2y(t)=-f'(t)+2f(t)
y′′(t)+3y′(t)+2y(t)=−f′(t)+2f(t),
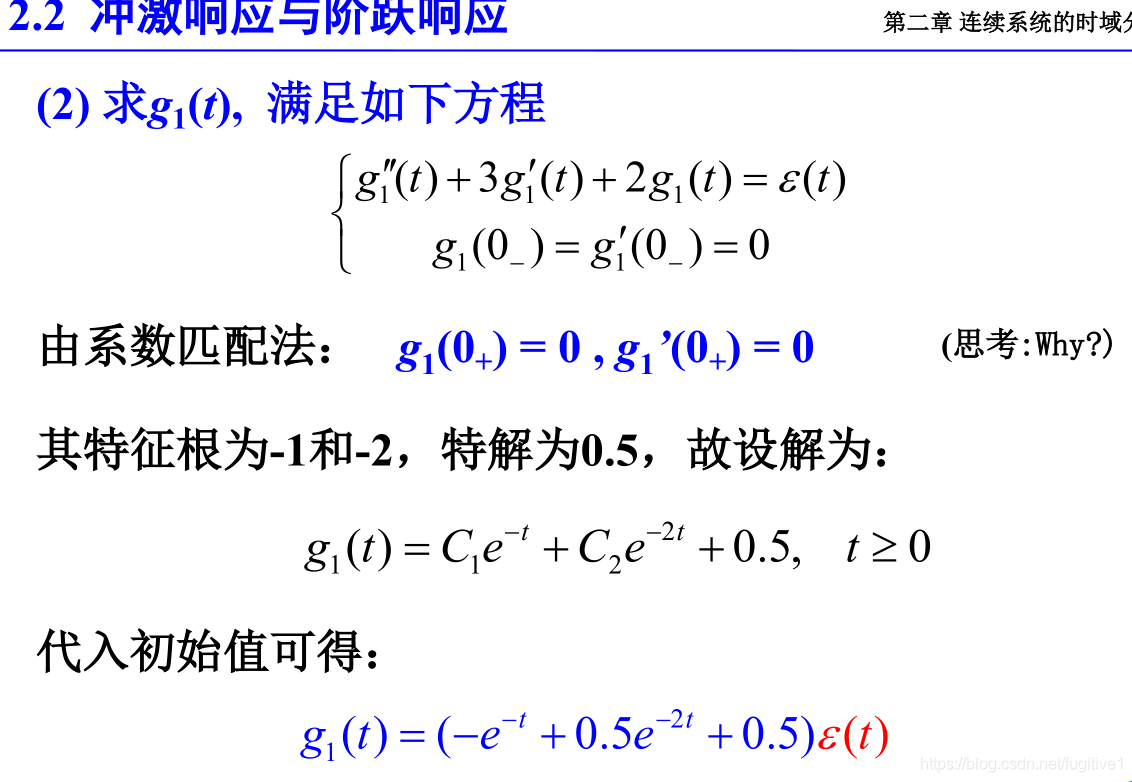
设
h
1
′
′
(
t
)
+
3
h
1
′
(
t
)
+
2
h
1
(
t
)
=
δ
(
t
)
h_1''(t)+3h_1'(t)+2h_1(t)=\delta(t)
h1′′(t)+3h1′(t)+2h1(t)=δ(t),由于二阶线性零状态响应初始条件有:
h
(
0
−
)
=
h
′
(
0
−
)
=
0
h(0_-)=h'(0_-)=0
h(0−)=h′(0−)=0。
由系数匹配法得到:
h
′
(
0
−
)
≠
h
′
(
0
+
)
,
h
(
0
−
)
=
h
(
0
+
)
=
0
h'(0_-)\neq h'(0_+),h(0_-)=h(0_+)=0
h′(0−)=h′(0+),h(0−)=h(0+)=0
两端从
0
−
→
0
+
0_- \to 0_+
0−→0+积分得到:
∫
0
−
0
+
h
1
′
′
(
t
)
+
3
∫
0
−
0
+
h
1
′
(
t
)
+
2
∫
0
−
0
+
h
1
(
t
)
=
∫
0
−
0
+
δ
(
t
)
\int_{0_-}^{0_+}h_1''(t)+3\int_{0_-}^{0_+}h_1'(t)+2\int_{0_-}^{0_+}h_1(t)=\int_{0_-}^{0_+}\delta(t)
∫0−0+h1′′(t)+3∫0−0+h1′(t)+2∫0−0+h1(t)=∫0−0+δ(t)
h
1
′
(
0
+
)
−
h
1
′
(
0
−
)
=
1
h'_1(0_+)-h'_1(0_-)=1
h1′(0+)−h1′(0−)=1
因此得到初始值:
h
(
0
+
)
=
0
,
h
′
(
0
+
)
=
1
h(0_+)=0,h'(0_+)=1
h(0+)=0,h′(0+)=1
当
t
>
0
t>0
t>0时 ,方程化为:
h
1
′
′
(
t
)
+
3
h
1
′
(
t
)
+
2
h
1
(
t
)
=
0
h_1''(t)+3h_1'(t)+2h_1(t)=0
h1′′(t)+3h1′(t)+2h1(t)=0,其特征跟分别为
r
1
=
−
1
,
r
2
=
−
2
r_1=-1,r_2=-2
r1=−1,r2=−2,因此设定解为
h
1
(
t
)
=
C
1
e
−
1
t
+
C
2
e
−
2
t
h_1(t)=C_1e^{-1t}+C_2e^{-2t}
h1(t)=C1e−1t+C2e−2t,带入初始值得到:
h
1
(
t
)
=
(
e
−
1
t
−
2
e
−
2
t
)
ε
(
t
)
h_1(t)=(e^{-1t}-2e^{-2t})\varepsilon(t)
h1(t)=(e−1t−2e−2t)ε(t)
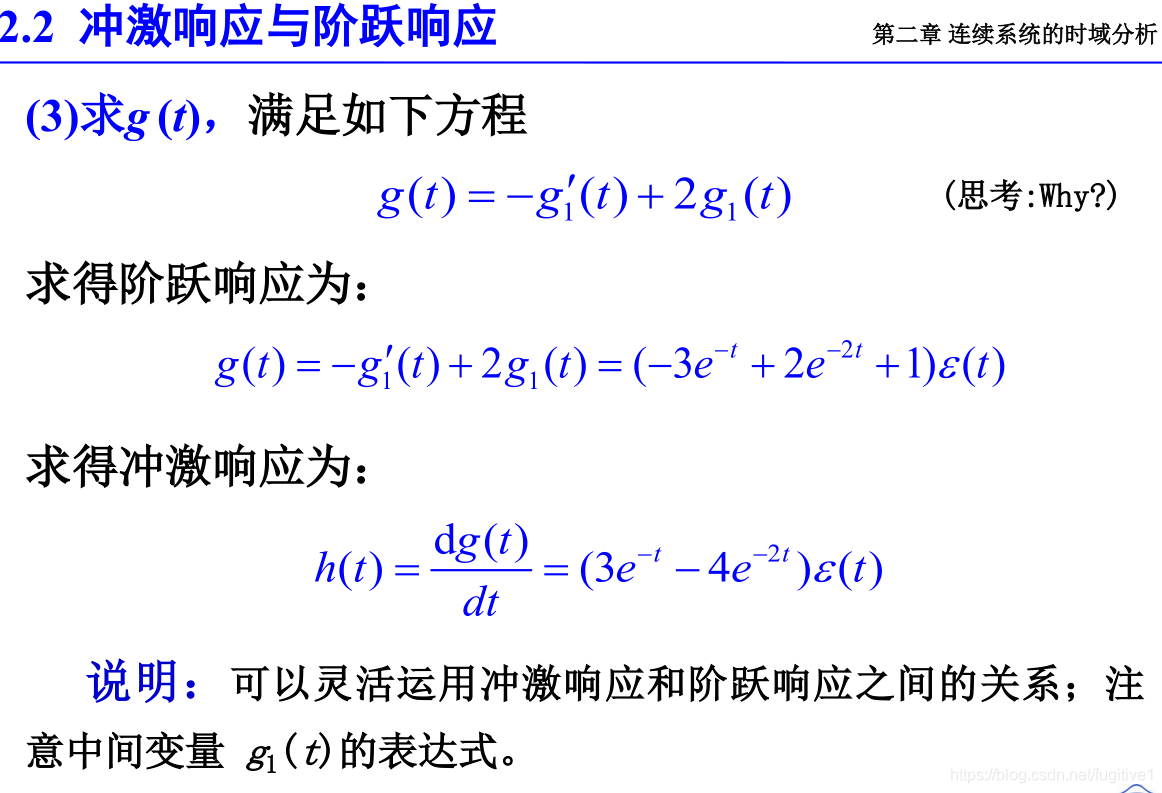
因此
−
f
′
(
t
)
+
2
f
(
t
)
→
−
h
1
′
(
t
)
+
2
h
1
(
t
)
=
(
3
e
−
1
t
−
4
e
−
2
t
)
ε
(
t
)
-f'(t)+2f(t)\to -h_1'(t)+2h_1(t)=(3e^{-1t}-4e^{-2t})\varepsilon(t)
−f′(t)+2f(t)→−h1′(t)+2h1(t)=(3e−1t−4e−2t)ε(t)
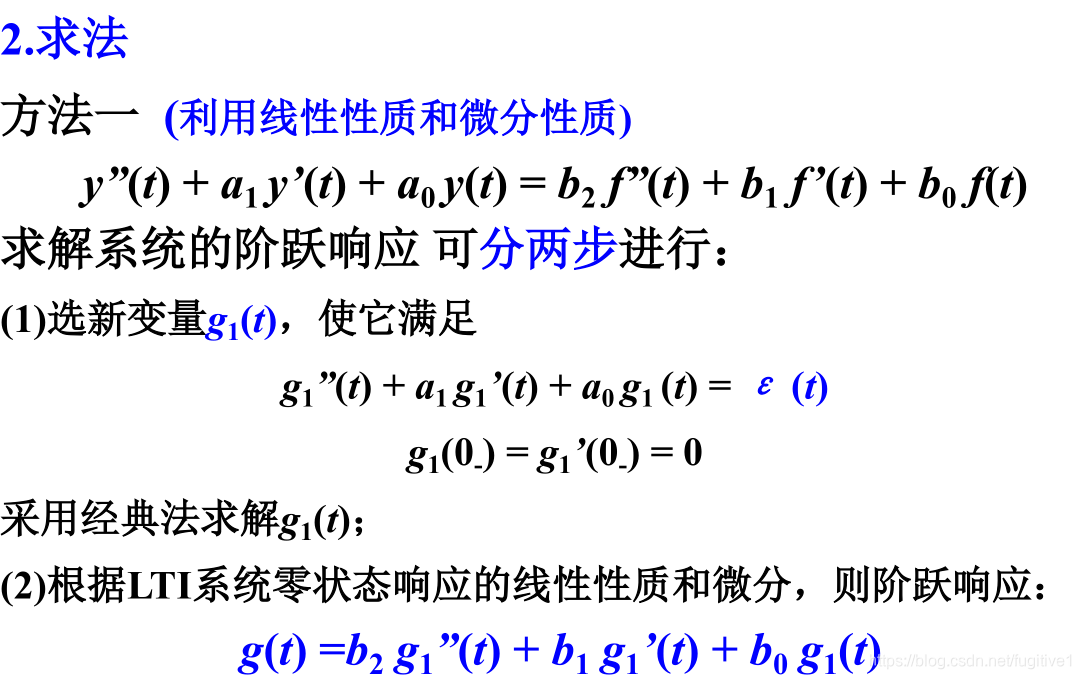
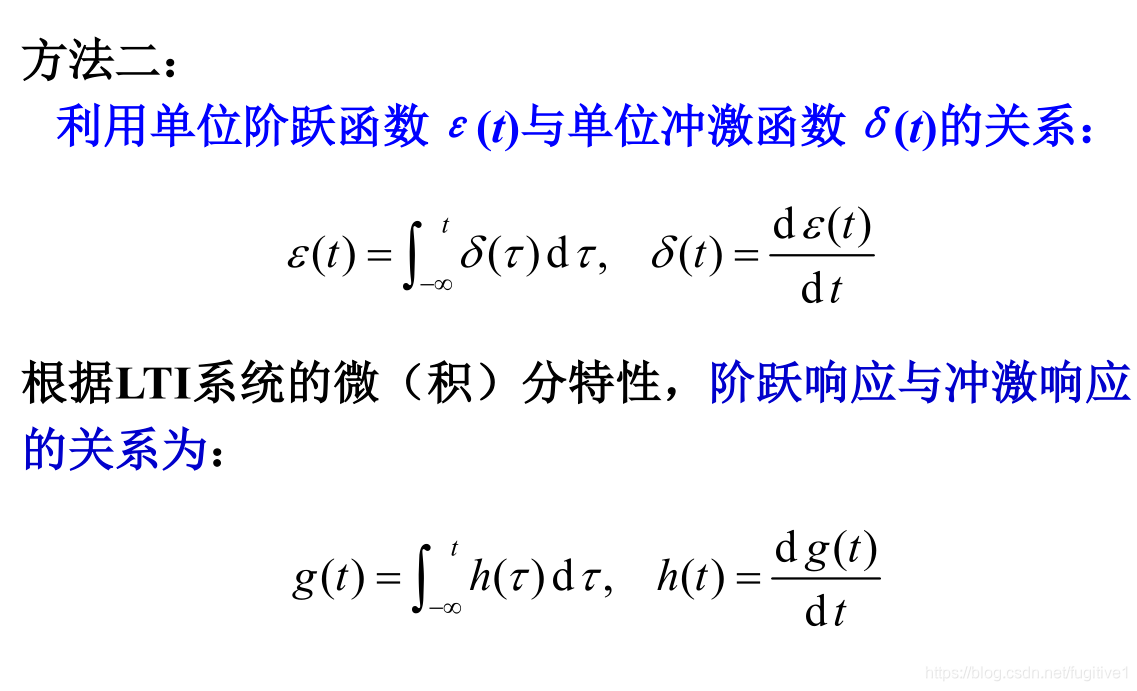
2.2.2 阶跃响应及其求法
2.3 卷积积分
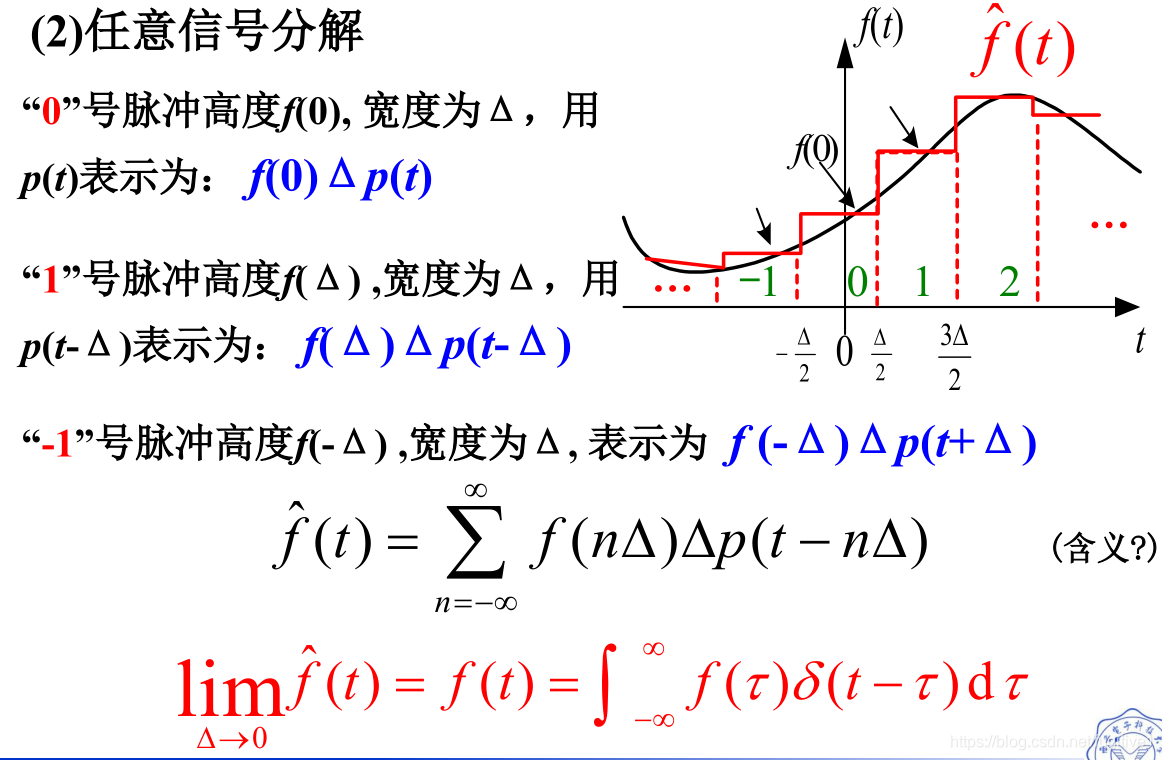
2.3.1 信号的时域分解
p
(
t
)
p(t)
p(t)的面积为
1
1
1,宽度为
Δ
\Delta
Δ,因此高度为
1
Δ
\frac{1}{\Delta}
Δ1。当
Δ
→
0
\Delta \to 0
Δ→0,
p
(
t
)
→
δ
(
t
)
p(t) \to \delta(t)
p(t)→δ(t)。

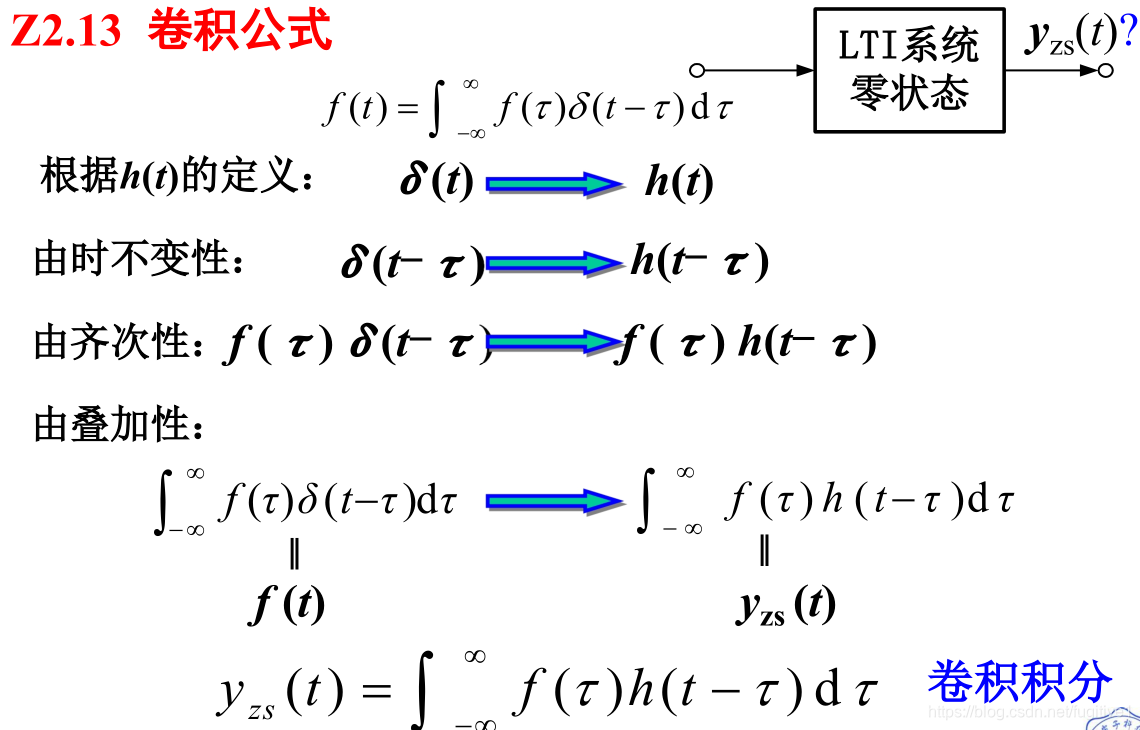
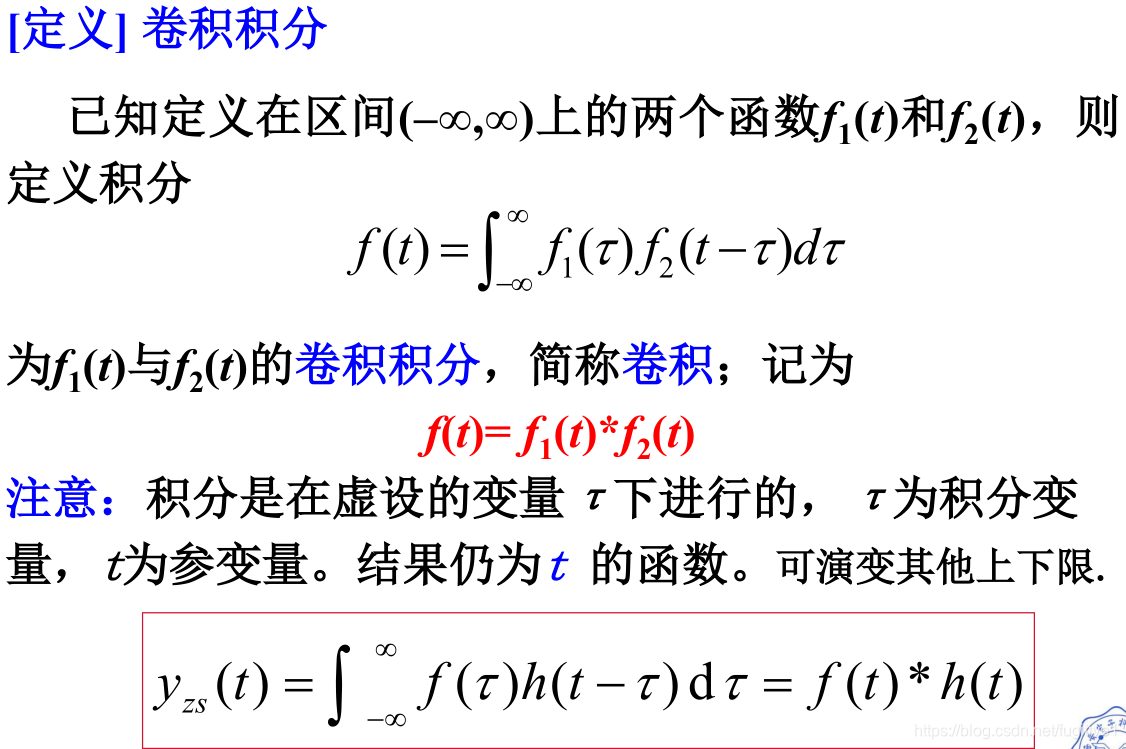
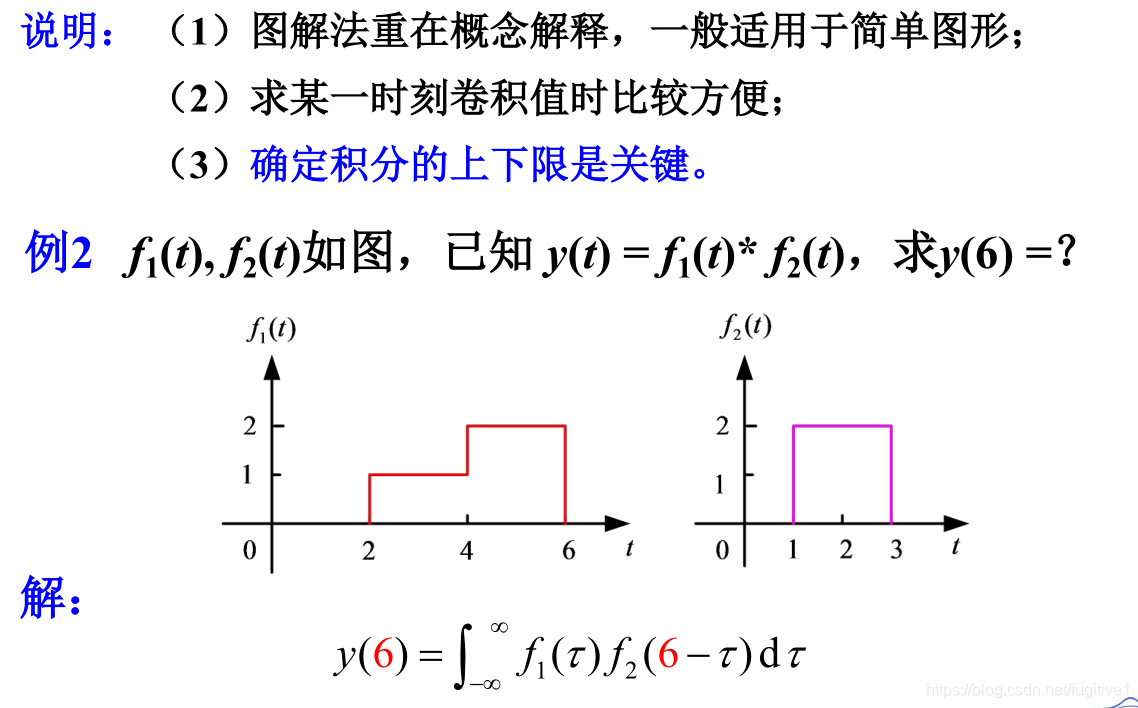
2.3.2 卷积公式

解:
f
(
t
)
=
f
1
(
t
)
∗
f
2
(
t
)
=
∫
−
∞
∞
f
1
(
τ
)
f
2
(
t
−
τ
)
d
τ
=
∫
−
∞
∞
e
−
t
ε
(
τ
)
ε
(
t
−
τ
)
d
τ
f(t)=f_1(t)*f_2(t)=\int_{-\infty}^{\infty}f_1(\tau)f_2(t-\tau) {\rm d}\tau=\int_{-\infty}^{\infty}e^{-t}\varepsilon(\tau)\varepsilon(t-\tau) {\rm d}\tau
f(t)=f1(t)∗f2(t)=∫−∞∞f1(τ)f2(t−τ)dτ=∫−∞∞e−tε(τ)ε(t−τ)dτ
由于单位阶跃函数在小于零时为零,因此该积分只在
τ
>
0
\tau >0
τ>0且
τ
<
t
\tau < t
τ<t有取值(这里有个隐含的含义,就是
t
>
0
t>0
t>0),且在这个范围内
ε
\varepsilon
ε的值取
1
1
1,积分限变为
0
→
t
0 \to t
0→t:
∫
0
t
e
−
t
ε
(
τ
)
ε
(
t
−
τ
)
d
τ
=
∫
0
t
e
−
t
d
τ
ε
(
t
)
=
[
−
e
−
τ
]
0
t
ε
(
t
)
=
(
1
−
e
−
t
)
ε
(
t
)
\int_0^te^{-t}\varepsilon(\tau)\varepsilon(t-\tau) {\rm d}\tau=\int_0^te^{-t} {\rm d}\tau\varepsilon(t)=[-e^{-\tau}]_{0}^{t}\varepsilon(t)=(1-e^{-t})\varepsilon(t)
∫0te−tε(τ)ε(t−τ)dτ=∫0te−tdτε(t)=[−e−τ]0tε(t)=(1−e−t)ε(t)
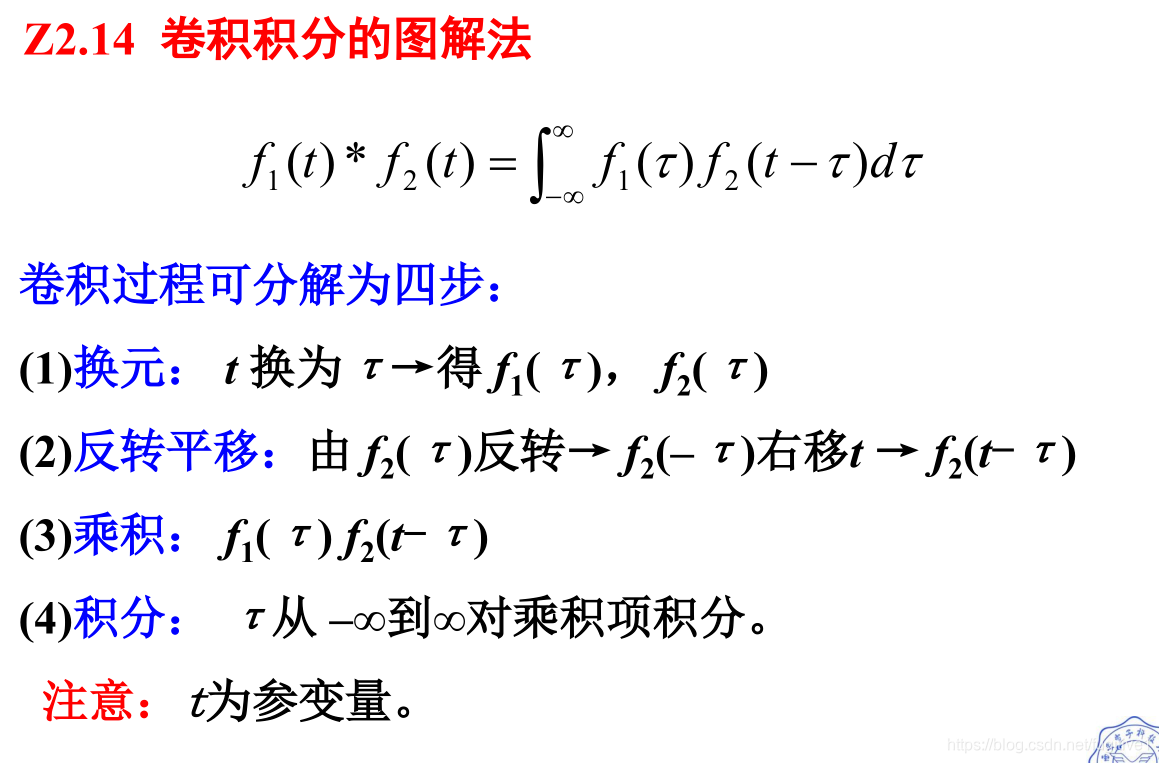
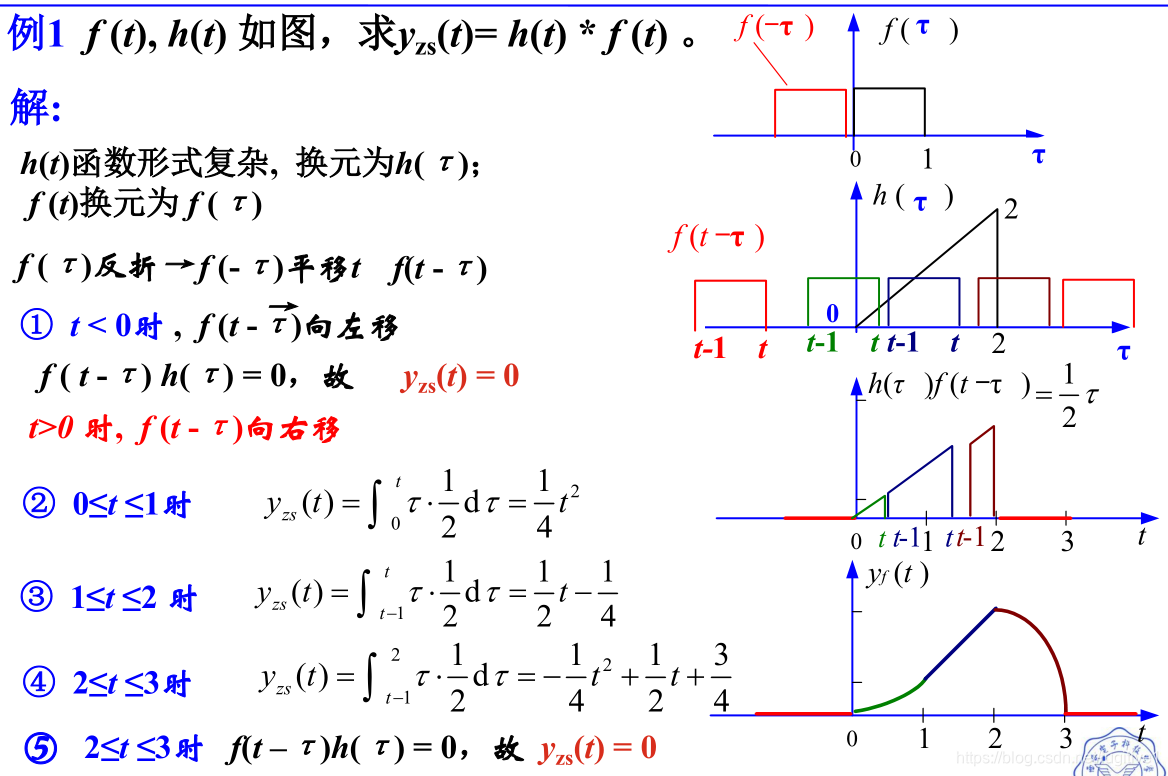
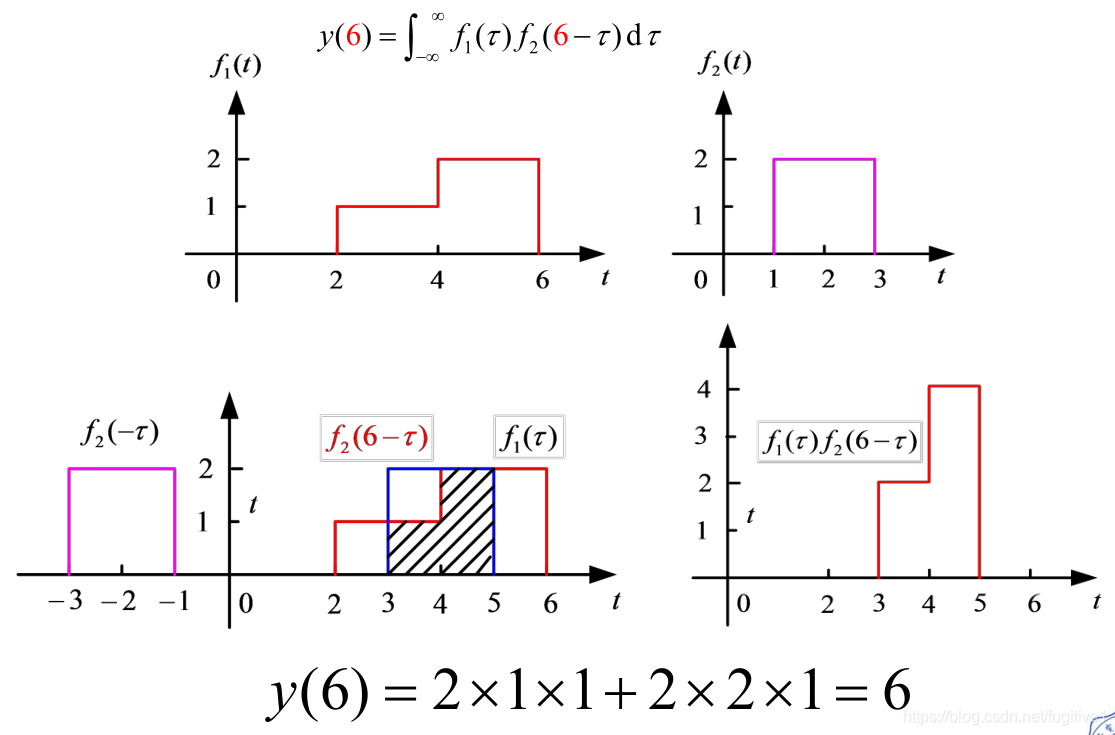
2.3.3 卷积积分的图解法
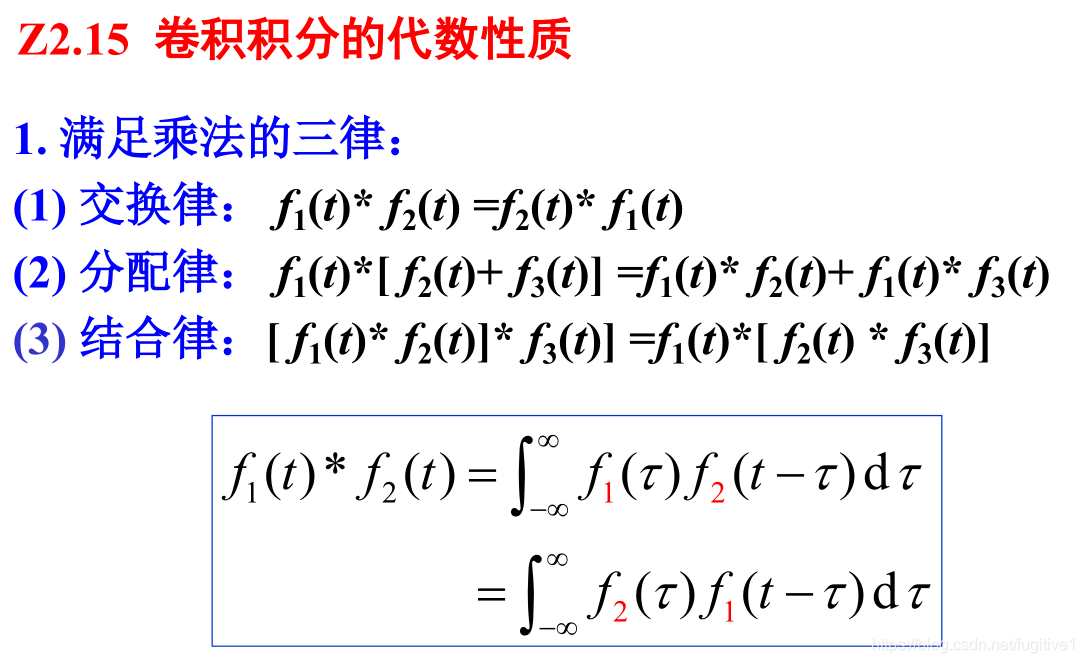
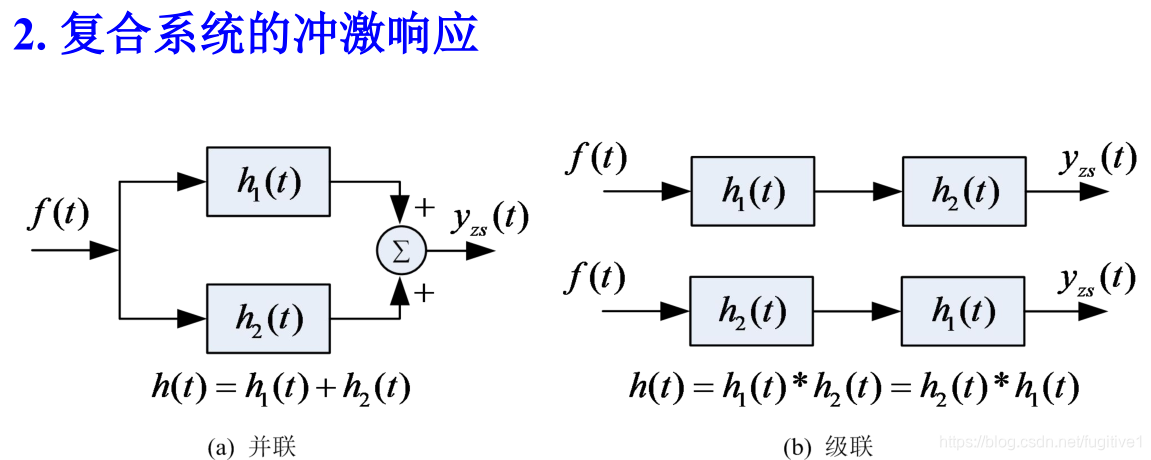
2.3.4 卷积积分的代数性质
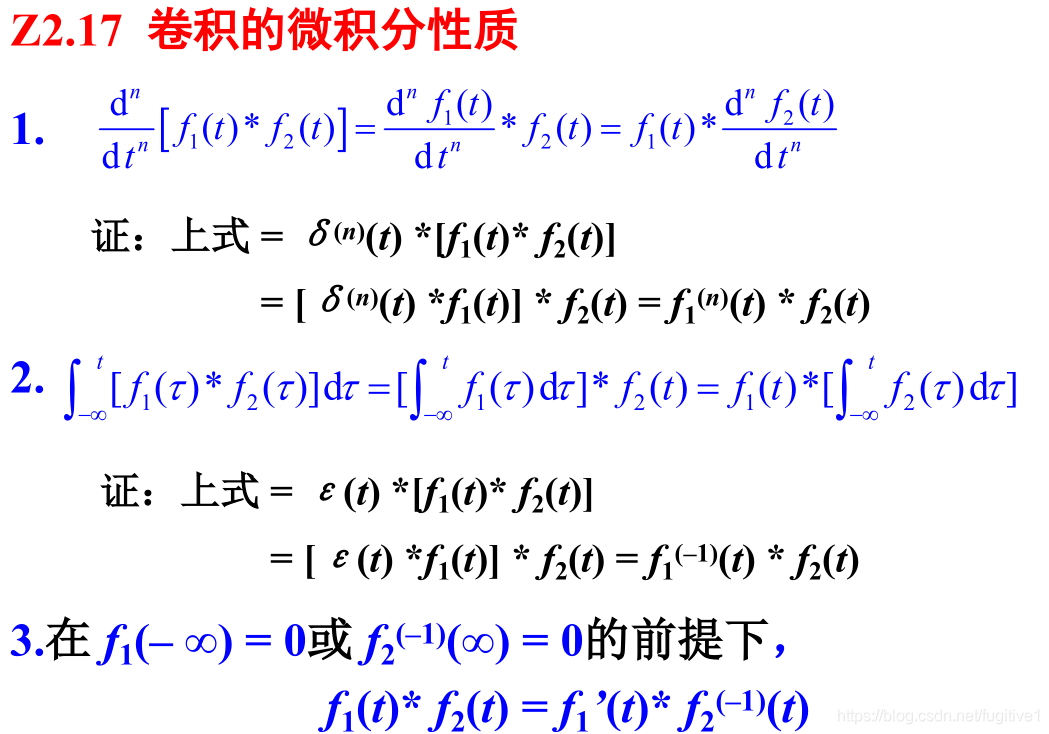
2.3.5 卷积积分的微积分性质
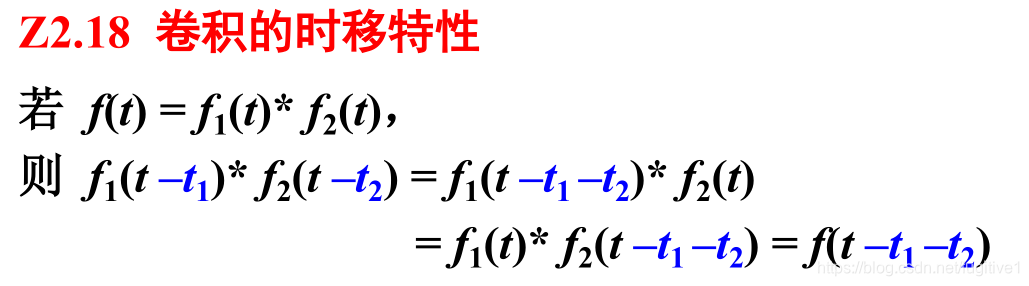
2.3.6 卷积积分的时移性质


函数
f
1
(
t
)
f_1(t)
f1(t)可以表示为两个阶跃函数的差:
f
1
(
t
)
=
ε
(
t
)
−
ε
(
t
−
2
)
f_1(t)=\varepsilon(t)-\varepsilon(t-2)
f1(t)=ε(t)−ε(t−2)
f
1
(
t
)
∗
f
2
(
t
)
=
(
ε
(
t
−
2
)
−
ε
(
t
)
)
∗
f
2
(
t
)
f_1(t)*f_2(t)=(\varepsilon(t-2)-\varepsilon(t))*f_2(t)
f1(t)∗f2(t)=(ε(t−2)−ε(t))∗f2(t)
根据分配率得到:
ε
(
t
)
∗
f
2
(
t
)
−
ε
(
t
)
∗
f
2
(
t
−
2
)
\varepsilon(t)*f_2(t)-\varepsilon(t)*f_2(t-2)
ε(t)∗f2(t)−ε(t)∗f2(t−2)
其中:
ε
(
t
)
∗
f
2
(
t
)
=
f
2
−
1
(
t
)
=
(
1
−
e
−
t
)
ε
(
t
)
\varepsilon(t)*f_2(t)=f_2^{-1}(t)=(1-e^{-t})\varepsilon(t)
ε(t)∗f2(t)=f2−1(t)=(1−e−t)ε(t)
f
2
−
1
(
t
)
f_2^{-1}(t)
f2−1(t)为
f
2
(
t
)
f_2(t)
f2(t)的积分,这里我有点不明白,感觉积分应该为
(
C
−
e
−
t
)
(C-e^{-t})
(C−e−t),C为任意常数,而不是
(
1
−
e
−
t
)
(1-e^{-t})
(1−e−t),说明一定有初始条件
f
2
−
1
(
0
)
=
0
f_2^{-1}(0)=0
f2−1(0)=0才能使得
C
=
1
C=1
C=1,我认为这里可以这样思考,积分代表函数图像与坐标轴围成的面积,当
t
<
0
t<0
t<0的时候函数取值为0,因此当
t
=
0
t=0
t=0时,函数与坐标轴围成的面积也为
0
0
0。
由卷积的时移特性得到:
ε
(
t
−
2
)
∗
f
2
(
t
)
=
(
1
−
e
−
(
t
−
2
)
)
ε
(
t
−
2
)
\varepsilon(t-2)*f_2(t)=(1-e^{-(t-2)})\varepsilon(t-2)
ε(t−2)∗f2(t)=(1−e−(t−2))ε(t−2)
最终得到:
f
1
(
t
)
∗
f
2
(
t
)
=
(
1
−
e
−
t
)
ε
(
t
)
−
(
1
−
e
−
(
t
−
2
)
)
ε
(
t
−
2
)
f_1(t)*f_2(t)=(1-e^{-t})\varepsilon(t)-(1-e^{-(t-2)})\varepsilon(t-2)
f1(t)∗f2(t)=(1−e−t)ε(t)−(1−e−(t−2))ε(t−2)
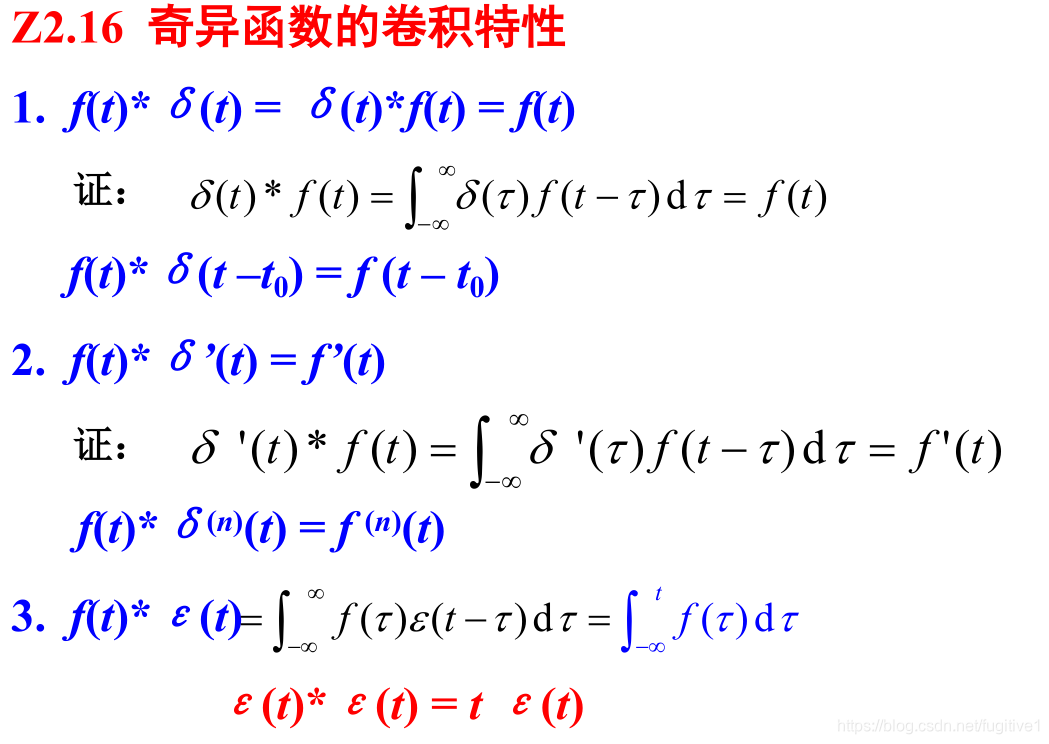
2.3.7 常用的卷积积分公式
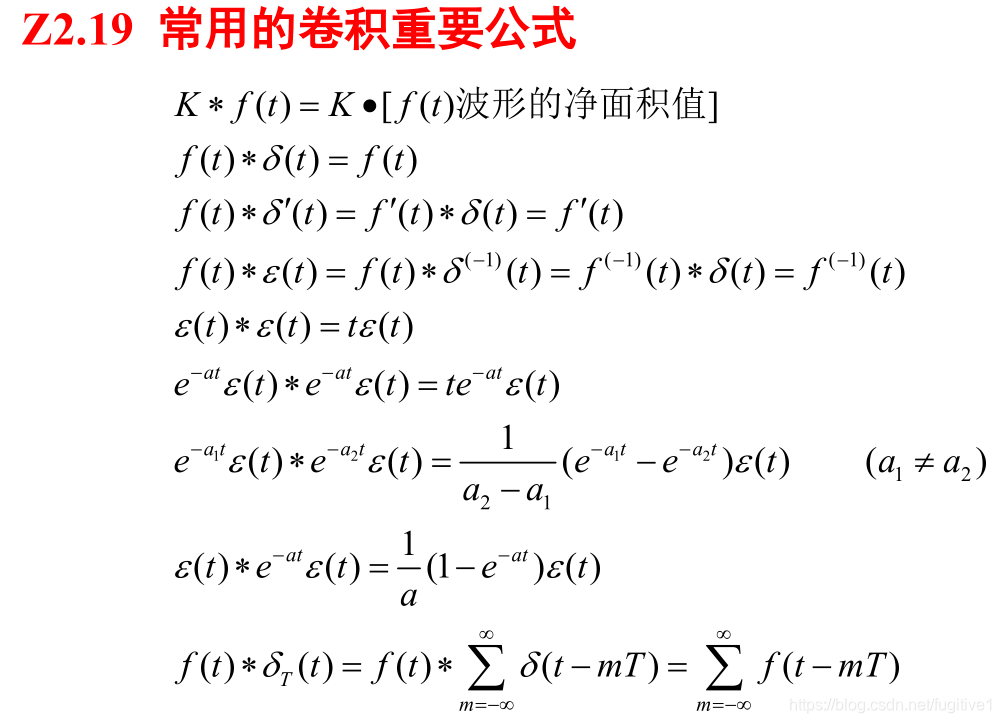
2.3.8 用梳状函数卷积产生周期信号
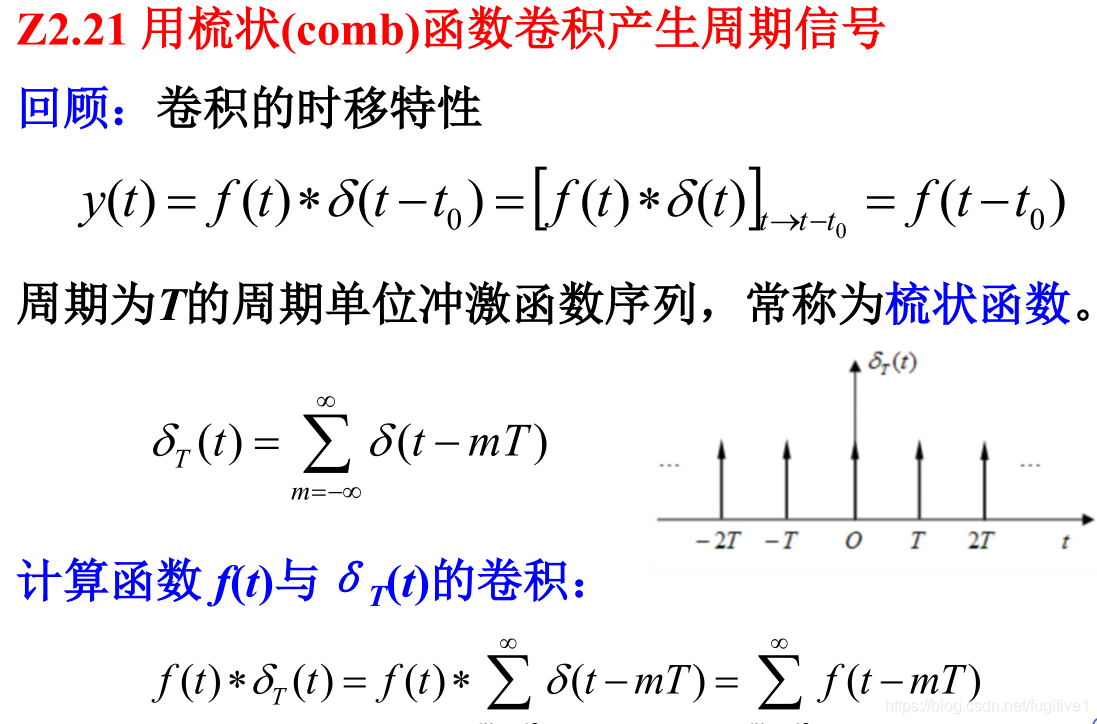
这个产生周期信号,在后面的数字信号处理会涉及到,公式
f
(
t
)
∗
δ
(
t
−
t
0
)
=
f
(
t
−
t
0
)
f(t)*\delta(t-t_0)=f(t-t_0)
f(t)∗δ(t−t0)=f(t−t0),相当于把
f
(
t
)
f(t)
f(t)向左平移了
t
0
t_0
t0个单位。
δ
T
(
t
)
\delta_T(t)
δT(t)是无数个周期为
T
T
T的
δ
\delta
δ,因此跟
δ
T
(
t
)
\delta_T(t)
δT(t)卷积自然就变成了周期函数。
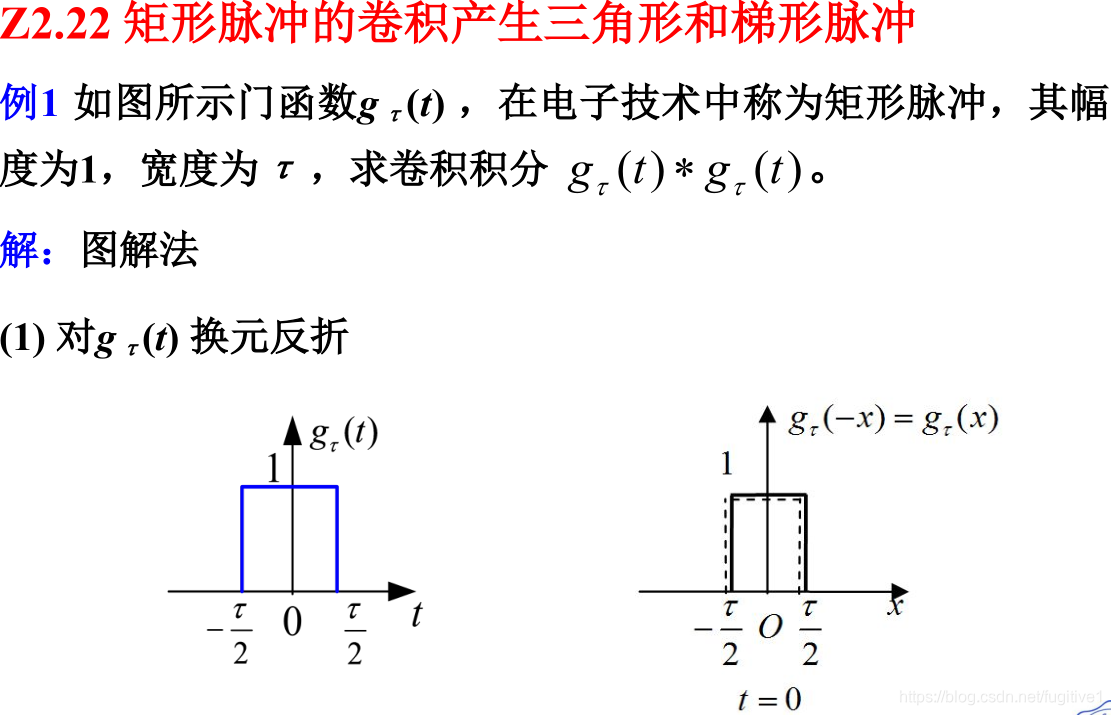
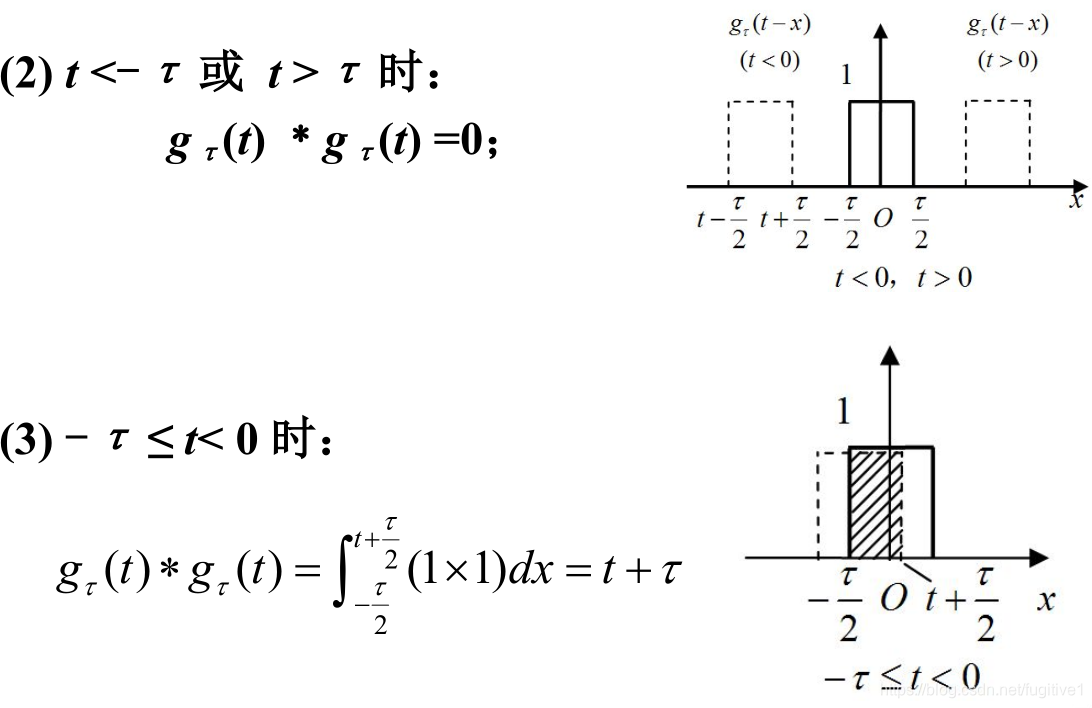
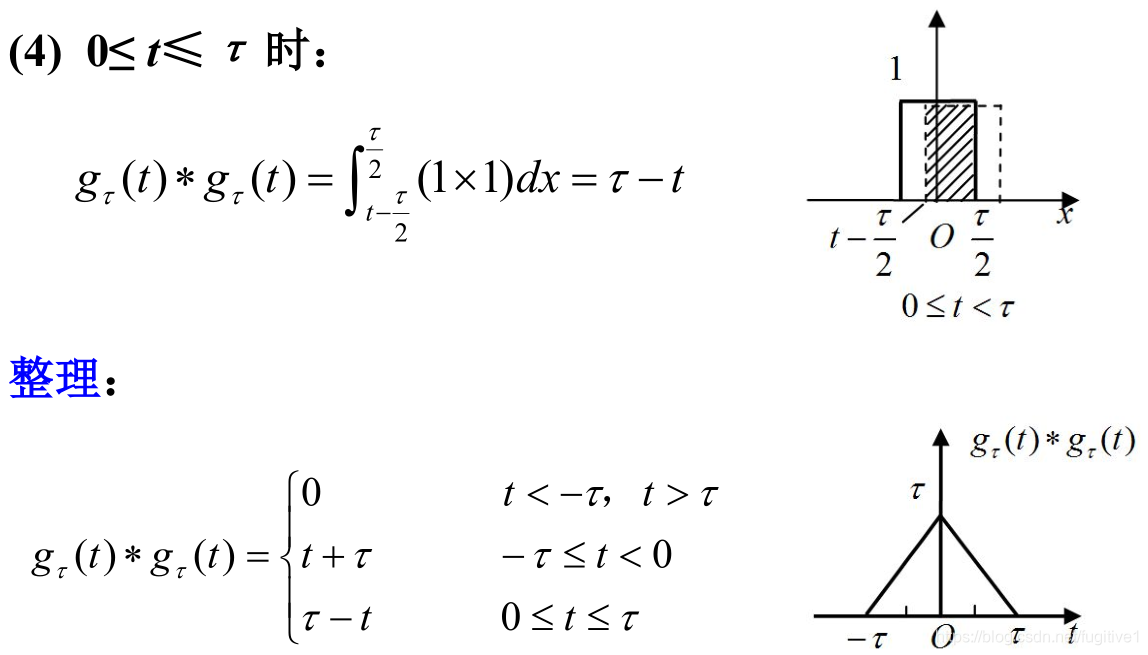
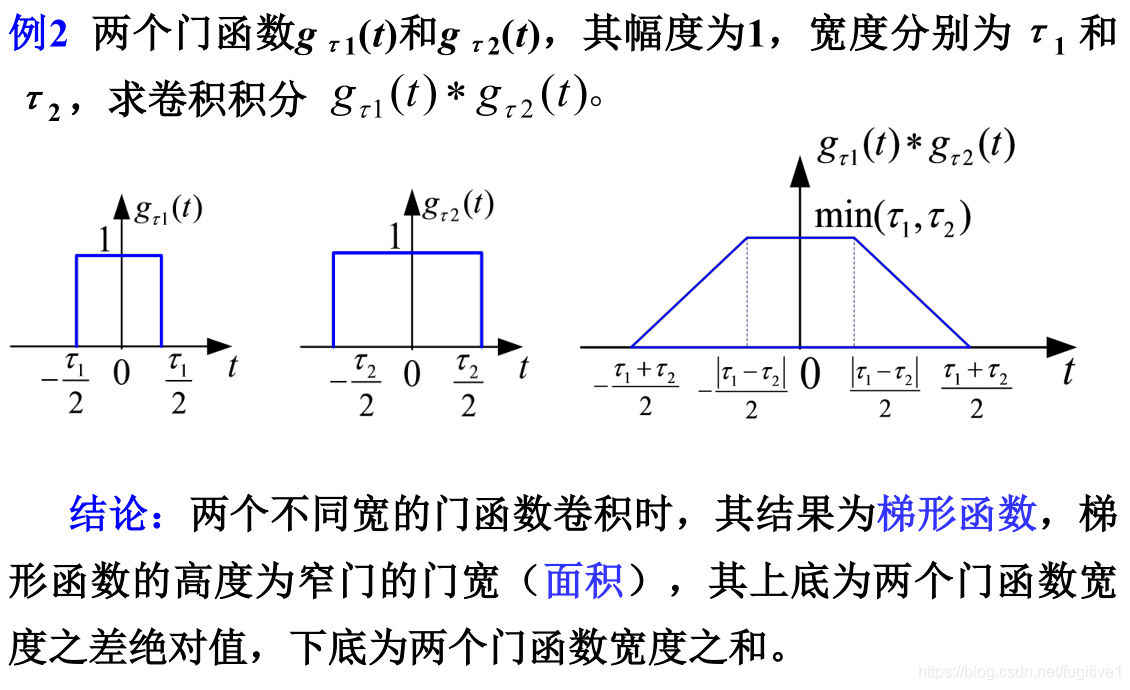
2.3.9 矩形脉冲的卷积产生三角形和梯形脉冲
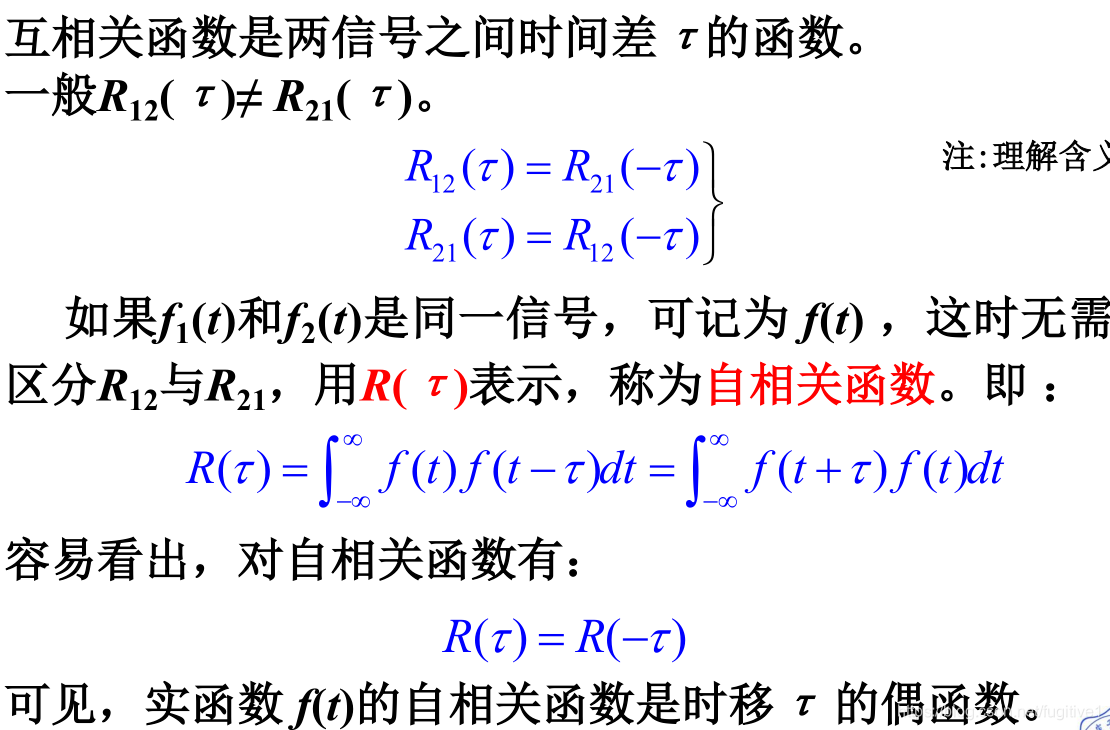
2.4 相关函数
2.4.1 互相关和自相关函数的定义
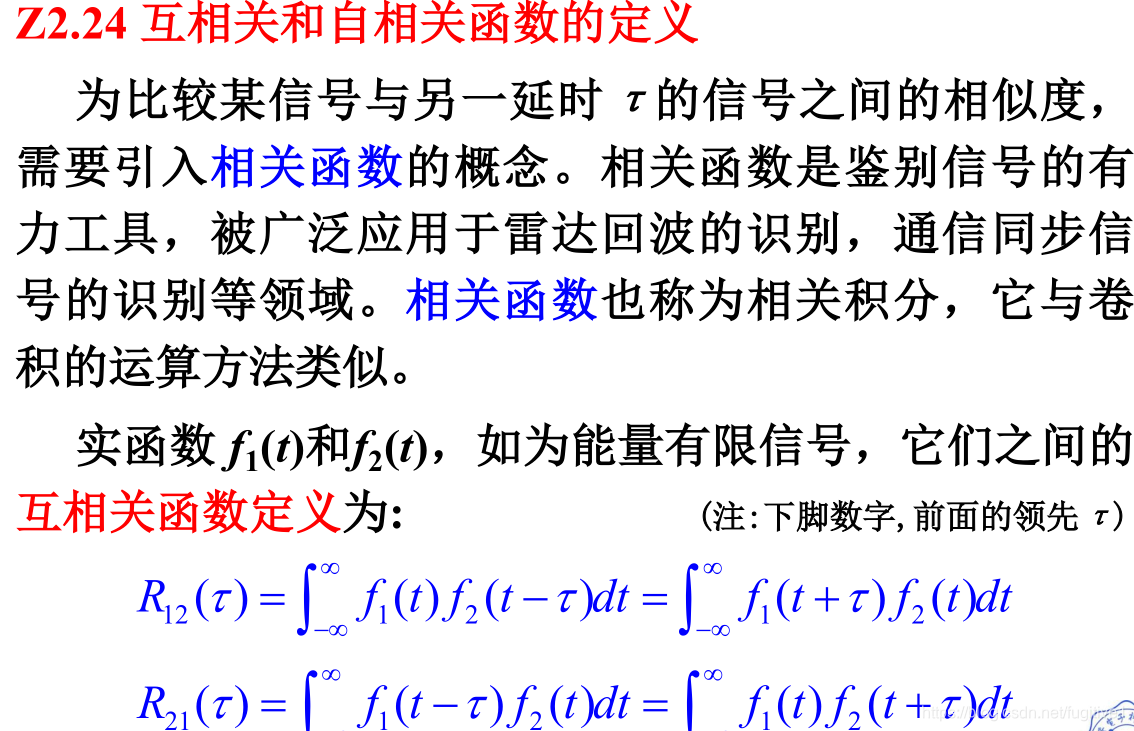
下面是相关函数的应用
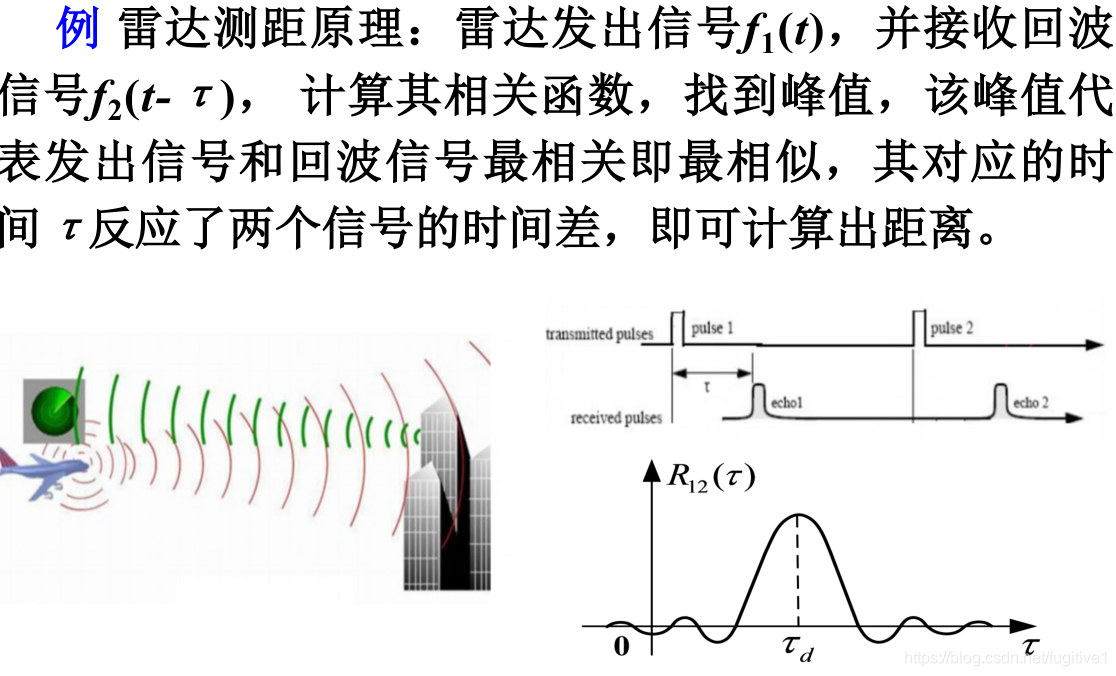
用这个例子来理解相关函数中这个“相关”的含义,雷达发射的信号如上面的transmitted pulses
f
1
(
t
)
f_1(t)
f1(t),接收的信号为received pulses
f
2
(
t
)
f_2(t)
f2(t),相关函数为
∫
−
∞
∞
f
1
(
t
)
∗
f
2
(
t
−
τ
)
\int_{-\infty}^{\infty}f_1(t)*f_2(t-\tau)
∫−∞∞f1(t)∗f2(t−τ)得到的是一个关于
τ
\tau
τ的函数,相关函数最大的时候得到的
τ
\tau
τ值就为雷达信号从发出到收到的时间间隔。
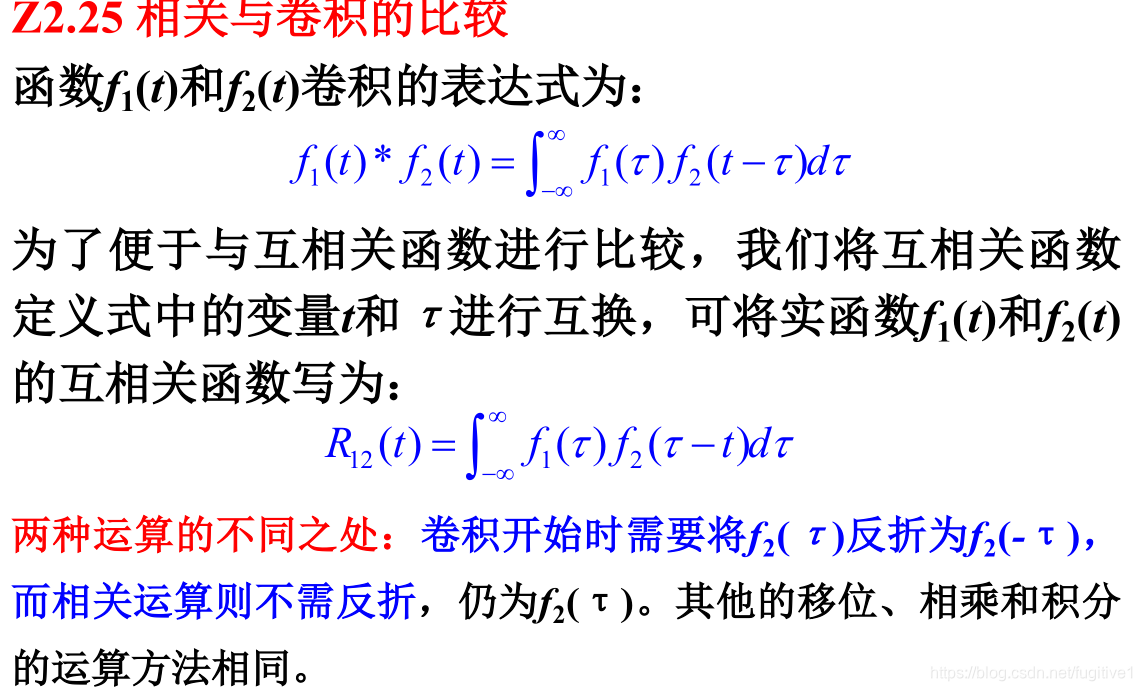
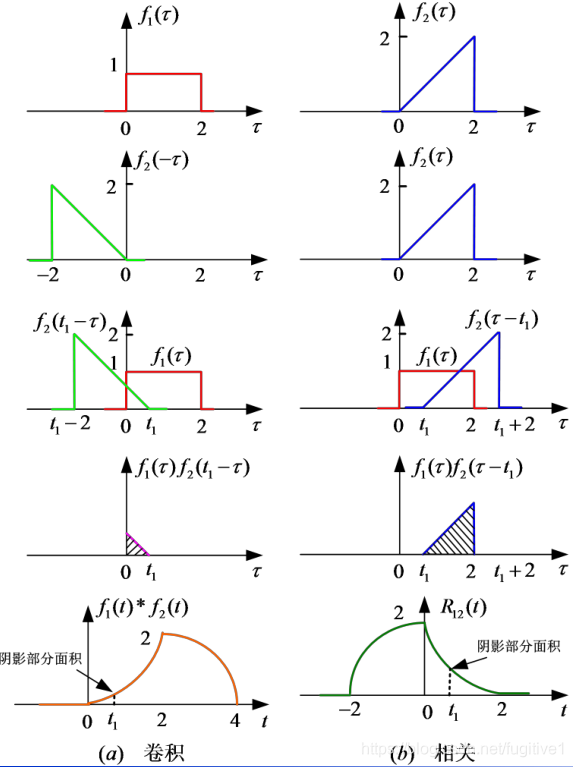
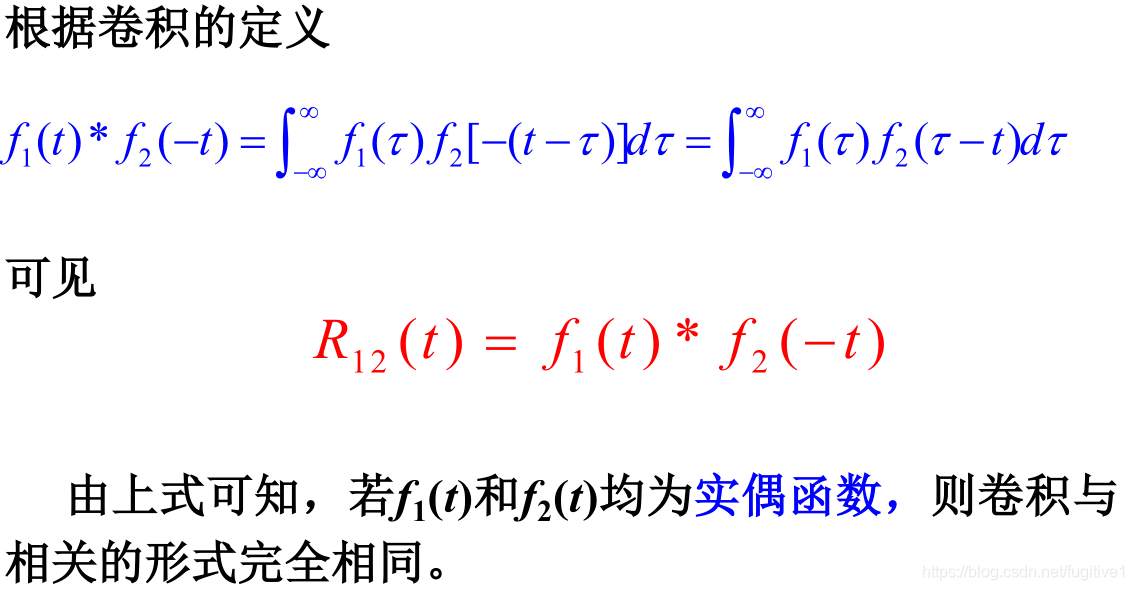
2.4.2 卷积与相关的比较
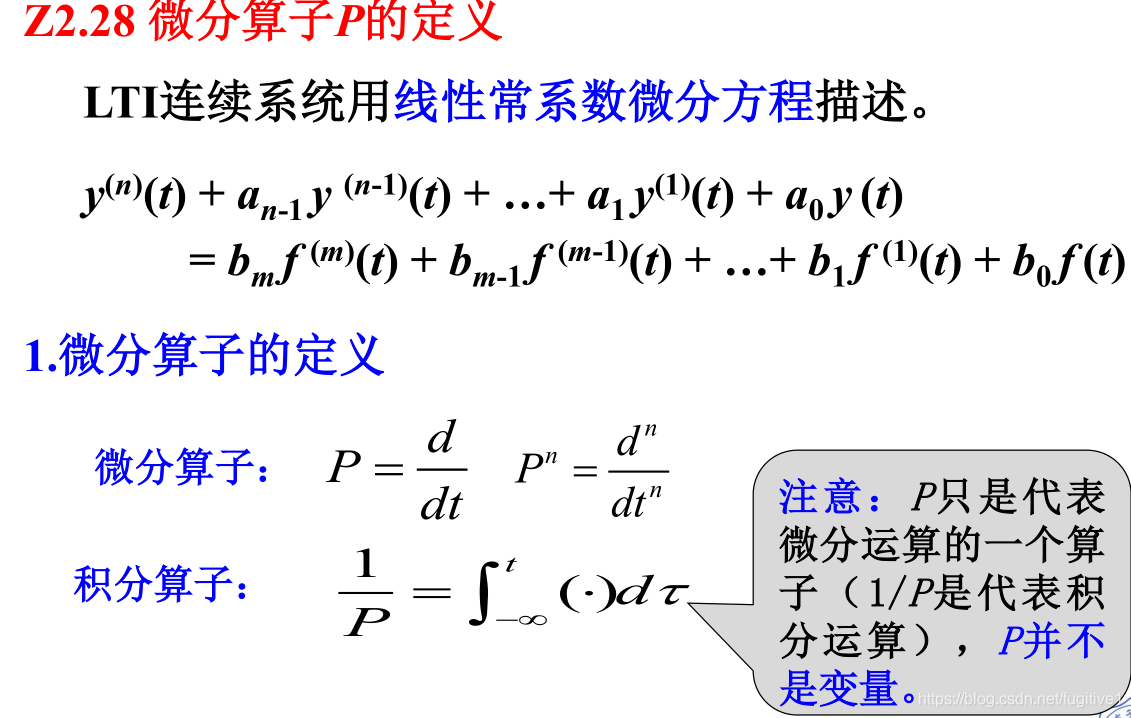
2.5 连续系统的微分算子描述
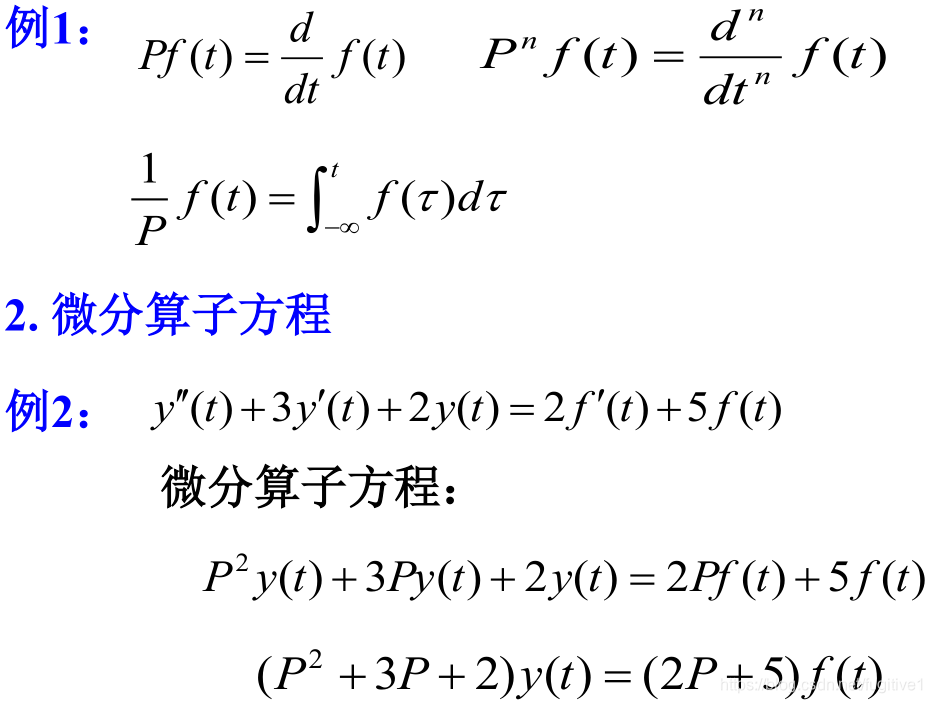
2.5.1 微分算子P的定义
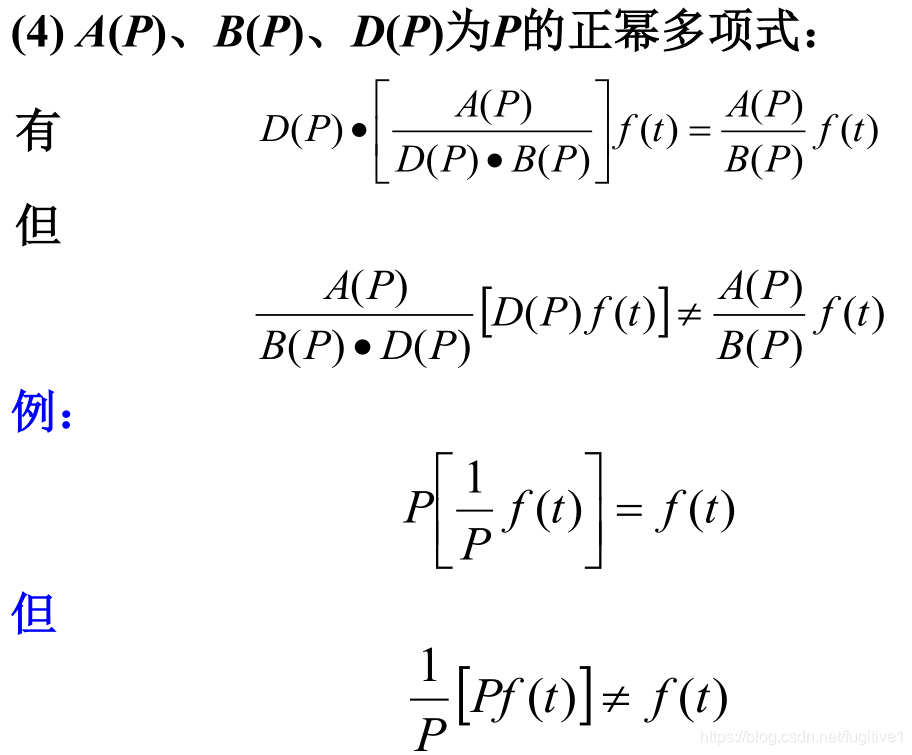
2.5.2 微分算子P的性质
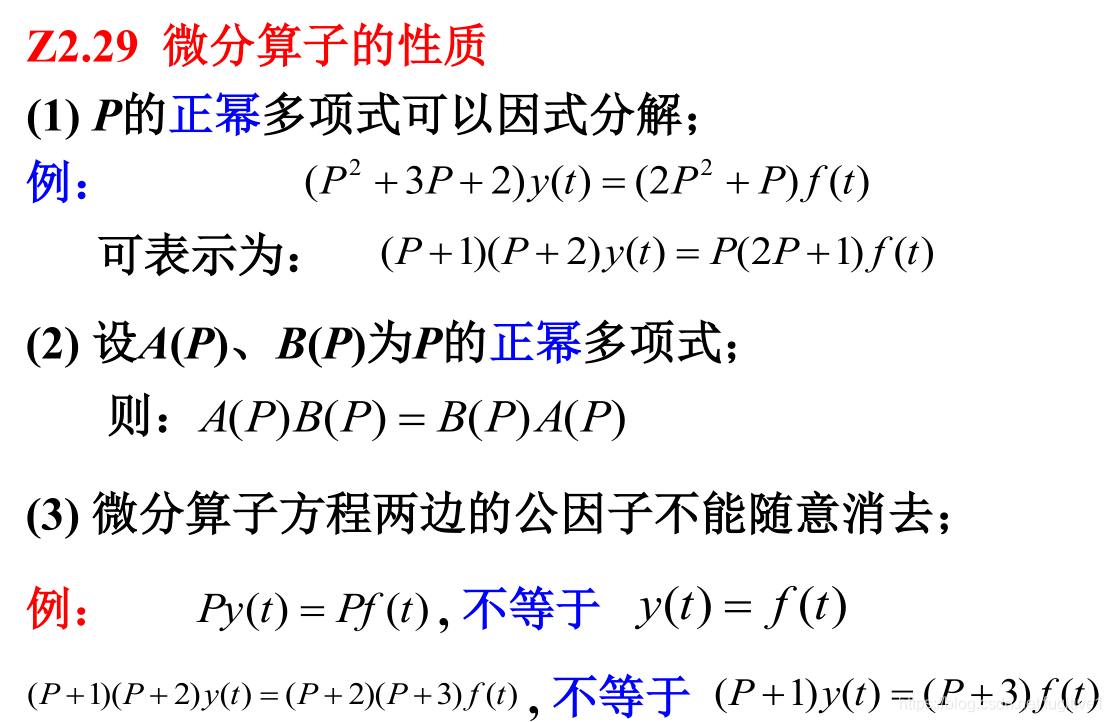
正幂多项式就是微分多项式,负幂指的积分。
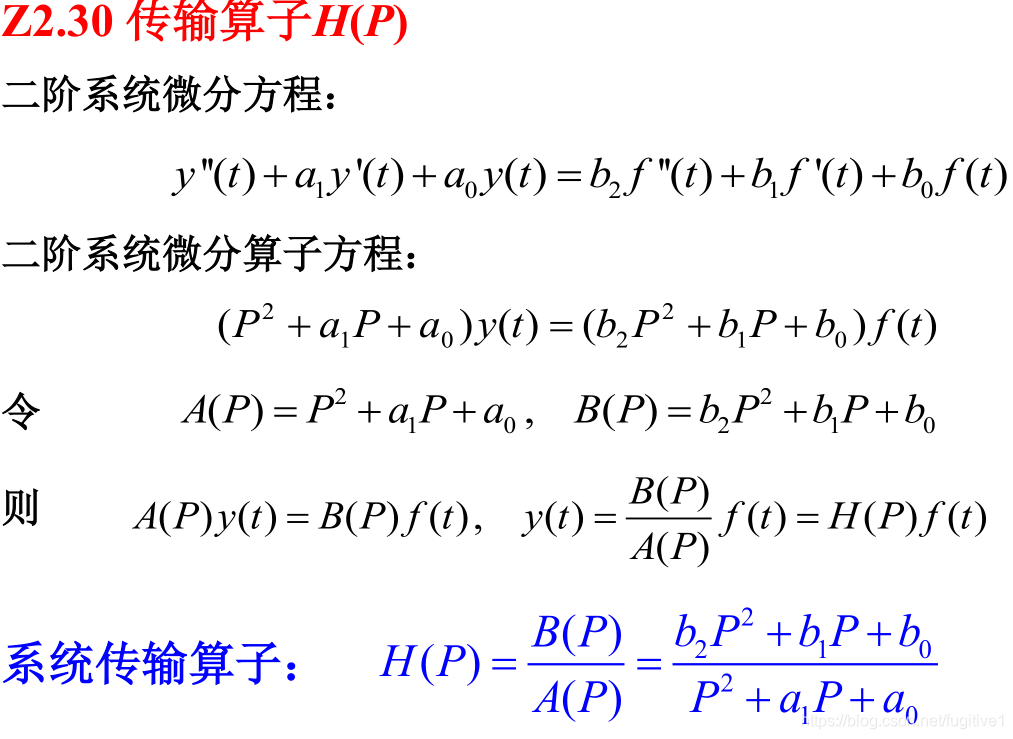
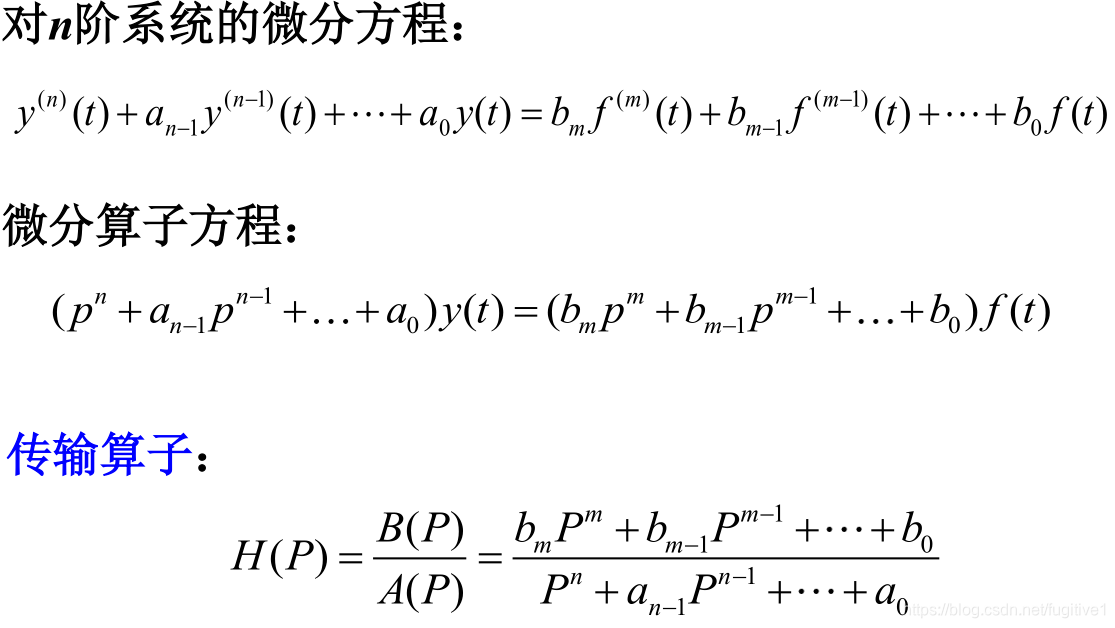
2.5.3 传输算子 H ( P ) H(P) H(P)
为了更简单描述系统方程的结构,引入了传输算子:
2.6 总结
这一章主要讲了连续时不变系统(LTI)的系统微分方程表示和解法,以及基本信号(冲激信号、阶跃信号)的响应。之后讲了信号在时域上的分解(卷积),引出了卷积积分以及相关函数,最后定义了微分算子 P P P以及传输算子 H ( P ) H(P) H(P)来更简便的描述系统的方程。

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









