今天学习了第三种图像缩放的方法,双三次插值法。由于理解能力比较差,看了好久的公式,还是云里雾里,但是为了督促自己学习,还是把已知的部分记录下来。
数学原理
维基百科的解释
假设源图像A大小为m*n,缩放后的目标图像B的大小为M*N。那么根据比例我们可以得到B(X,Y)在A上的的
对应坐标为A(x,y)=A(X*(m/M),Y*(n/N))。在双线性插值法中,我们选取A(x,y)的最近四个点。而在双立方
插值法中,我们选取的是最近的16个像素点作为计算目标图像B(X,Y)处像素值的参数。如图所示:
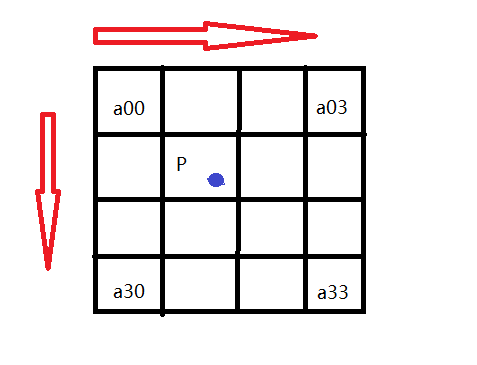
如图所示P点就是目标图像B在(X,Y)处对应于源图像中的位置,P的坐标位置会出现小数部分,所以我们假设
P的坐标为P(x+u,y+v),其中x,y分别表示整数部分,u,v分别表示小数部分。那么我们就可以得到如图所示的
最近16个像素的位置,在这里用a(i,j)(i,j=0,1,2,3)来表示。
双立方插值的目的就是通过找到一种关系,或者说系数,可以把这16个像素对于P处像素值得影响因子找出
来,从而根据这个影响因子来获得目标图像对应点的像素值,达到图像缩放的目的。
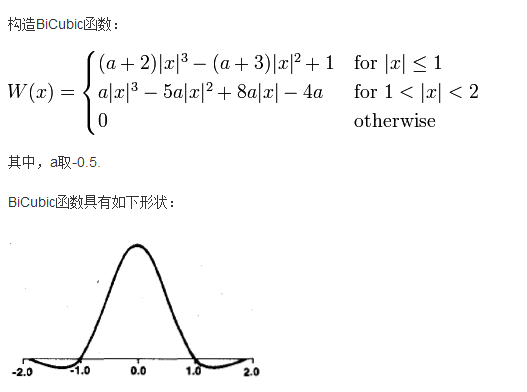
我在这次的学习中学习的是基于BiCubic基函数的双三次插值法,BiCubic基函数形式如下:
参考这里的博客
我们要做的就是求出BiCubic函数中的参数x,从而获得上面所说的16个像素所对应的系数。在学习双线性插
值法的时候,我们是把图像的行和列分开来理解的,那么在这里,我们也用这种方法描述如何求出a(i,j)对应
的系数k_ij。假设行系数为k_i,列系数为k_j。我们以a00位置为例:
首先,我们要求出当前像素与P点的位置,比如a00距离P(x+u,y+v)的距离为(1+u,1+v)。
那么我们可以得到:k_i_0=W(1+u),k_j_0=W(1+v).
同理我们可以得到所有行和列对应的系数:
k_i_0=W(1+u), k_i_1=W(u), k__i_2=W(1-u), k_i_3=W(2-u);
k_j_0=W(1+v), k_j_1=W(v), k_j_2=W(1-v), k_j_3=W(2-v);
这样我们就分别得到了行和列方向上的系数。
由k_i_j=k_i*k_j我们就可以得到每个像素a(i,j)对应的权值了。
最后通过求和公式可以得到目标图片B(X,Y)对应的像素值:
pixelB(X,Y)=pixelA(0,0)*k_0_0+pixelA(0,1)*k_0_1+…+pixelA(3,3)*k_3_3;
这里其实就是个求和公式,由于不知道怎么编辑公式,就这样表达了。
程序实现
#include <opencv2\opencv.hpp>
#include <iostream>
#include <math.h>
using namespace std;
using namespace cv;
float a = -0.5;
void getW_x(float w_x[4], float x);
void getW_y(float w_y[4], float y);
int main(){
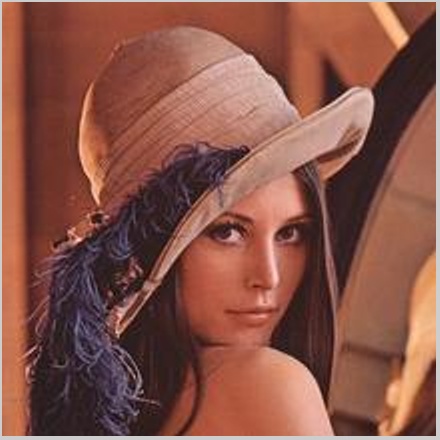
Mat image = imread("lena.jpg");
float Row_B = image.rows*2;
float Col_B = image.cols*2;
Mat biggerImage(Row_B, Col_B, CV_8UC3);
for (int i = 2; i < Row_B-4; i++){
for (int j = 2; j < Col_B-4; j++){
float x = i*(image.rows / Row_B);
float y = j*(image.cols / Col_B);
float w_x[4], w_y[4];
getW_x(w_x, x);
getW_y(w_y, y);
Vec3f temp = { 0, 0, 0 };
for (int s = 0; s <= 3; s++){
for (int t = 0; t <= 3; t++){
temp = temp + (Vec3f)(image.at<Vec3b>(int(x) + s - 1, int(y) + t - 1))*w_x[s] * w_y[t];
}
}
biggerImage.at<Vec3b>(i, j) = (Vec3b)temp;
}
}
imshow("image", image);
imshow("biggerImage", biggerImage);
waitKey(0);
return 0;
}
void getW_x(float w_x[4],float x){
int X = (int)x;
float stemp_x[4];
stemp_x[0] = 1 + (x - X);
stemp_x[1] = x - X;
stemp_x[2] = 1 - (x - X);
stemp_x[3] = 2 - (x - X);
w_x[0] = a*abs(stemp_x[0] * stemp_x[0] * stemp_x[0]) - 5 * a*stemp_x[0] * stemp_x[0] + 8 * a*abs(stemp_x[0]) - 4 * a;
w_x[1] = (a + 2)*abs(stemp_x[1] * stemp_x[1] * stemp_x[1]) - (a + 3)*stemp_x[1] * stemp_x[1] + 1;
w_x[2] = (a + 2)*abs(stemp_x[2] * stemp_x[2] * stemp_x[2]) - (a + 3)*stemp_x[2] * stemp_x[2] + 1;
w_x[3] = a*abs(stemp_x[3] * stemp_x[3] * stemp_x[3]) - 5 * a*stemp_x[3] * stemp_x[3] + 8 * a*abs(stemp_x[3]) - 4 * a;
}
void getW_y(float w_y[4], float y){
int Y = (int)y;
float stemp_y[4];
stemp_y[0] = 1.0 + (y - Y);
stemp_y[1] = y - Y;
stemp_y[2] = 1 - (y - Y);
stemp_y[3] = 2 - (y - Y);
w_y[0] = a*abs(stemp_y[0] * stemp_y[0] * stemp_y[0]) - 5 * a*stemp_y[0] * stemp_y[0] + 8 * a*abs(stemp_y[0]) - 4 * a;
w_y[1] = (a + 2)*abs(stemp_y[1] * stemp_y[1] * stemp_y[1]) - (a + 3)*stemp_y[1] * stemp_y[1] + 1;
w_y[2] = (a + 2)*abs(stemp_y[2] * stemp_y[2] * stemp_y[2]) - (a + 3)*stemp_y[2] * stemp_y[2] + 1;
w_y[3] = a*abs(stemp_y[3] * stemp_y[3] * stemp_y[3]) - 5 * a*stemp_y[3] * stemp_y[3] + 8 * a*abs(stemp_y[3]) - 4 * a;
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
注:由于作者编程能力有限,希望有人能指正一下怎么优化这里的程序,这个程序只是实现了算法,运行
速度慢的要死不能忍受!
效果展示
























 705
705

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









