






Contingency Planning over Probabilistic Hybrid Obstacle Predictions for Autonomous Road Vehicles
Abstrct
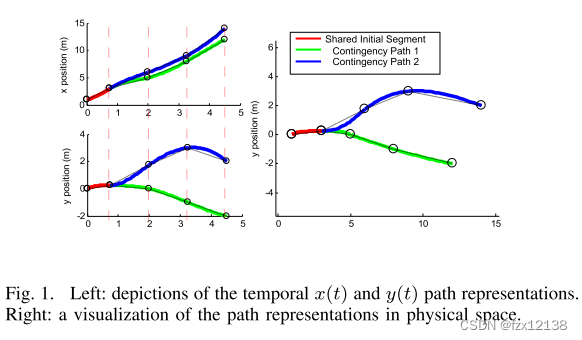
由于周围车辆在行车过程中意图不准确,因此在实际调试中经常会遇见,agent意图跳变引起的自车刹停,因此提出contingency的思想,也就是根据前车未来运动状态的概率分布,同时规划出多个轨迹,并且为了让两个plan在规划的时间序列上连续,规划由两部分组成:第一部分在前车具有不用未来运动的可能性时贡献相同的轨迹,第二部分则是在前车不同的未来运动预测下进行规划。
三次多项式
这里叉开一个话题,之前一直没有看三次多项式,这里补一下三次多项式拟合的相关内容,这里拿B站小黎视频作为梳理内容,链接如下:
第6节_基于三次样条插值的路径规划算法_哔哩哔哩_bilibili

龙格现象:
插值多项式的龙格现象的介绍与模拟_龙格函数多项式插值画图-CSDN博客
在《计算方法》和《计算机图形学基础》中讲到插值(线性插值、抛物线插值、高次lagrang插值)的拟合度,在三种自由曲线的图形中,是上升趋势,我们总以为次数越高精度越高,实际上,当点数n 增大(次数m=n-1 也增大)时,有时会在两端产生激烈的震荡,出现函数不收敛的现象,即所谓的龙格现象。


Obstacle Prediction

TODO














 844
844











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









