






新一代卡尔曼滤波 全维UKF程序
组合导航技术,三维姿态角跟踪,三维位置跟踪 。
陀螺仪、加速度和磁力计数据,GPS及气压计光流数据融合,通过快速过滤测量传感器数据的杂波,得出准确的角度和位置信息。
状态量:姿态四元数,陀螺零飘,位置和速度。
全维UKF非加性处理噪音,并且把噪音纳入状态变量,以提高滤波精度。
包含matlab和C语言双版本。
已经用于无人机上验证过。
ID:6675669933276183
yuchongzhangyuan
新一代卡尔曼滤波 全维UKF程序
引言:
在现代导航系统中,组合导航技术凭借其高精度和鲁棒性成为了研究热点。姿态角跟踪和位置跟踪是组合导航系统中的两个核心问题。为了解决这些问题,我们提出了一种基于新一代卡尔曼滤波全维UKF程序的方法。本文将详细介绍该程序的原理和实现,并提供了matlab和C语言双版本供程序员使用。
-
研究背景和意义
在无人机、航天航空、机器人等领域,精准的姿态角跟踪和位置跟踪对于实时控制和导航至关重要。传统导航系统单一传感器测量数据精度有限,容易受到噪音的影响,无法满足高精度导航需求。因此,需要一种能够融合多种传感器数据的滤波算法,提高测量数据的准确性和可靠性。 -
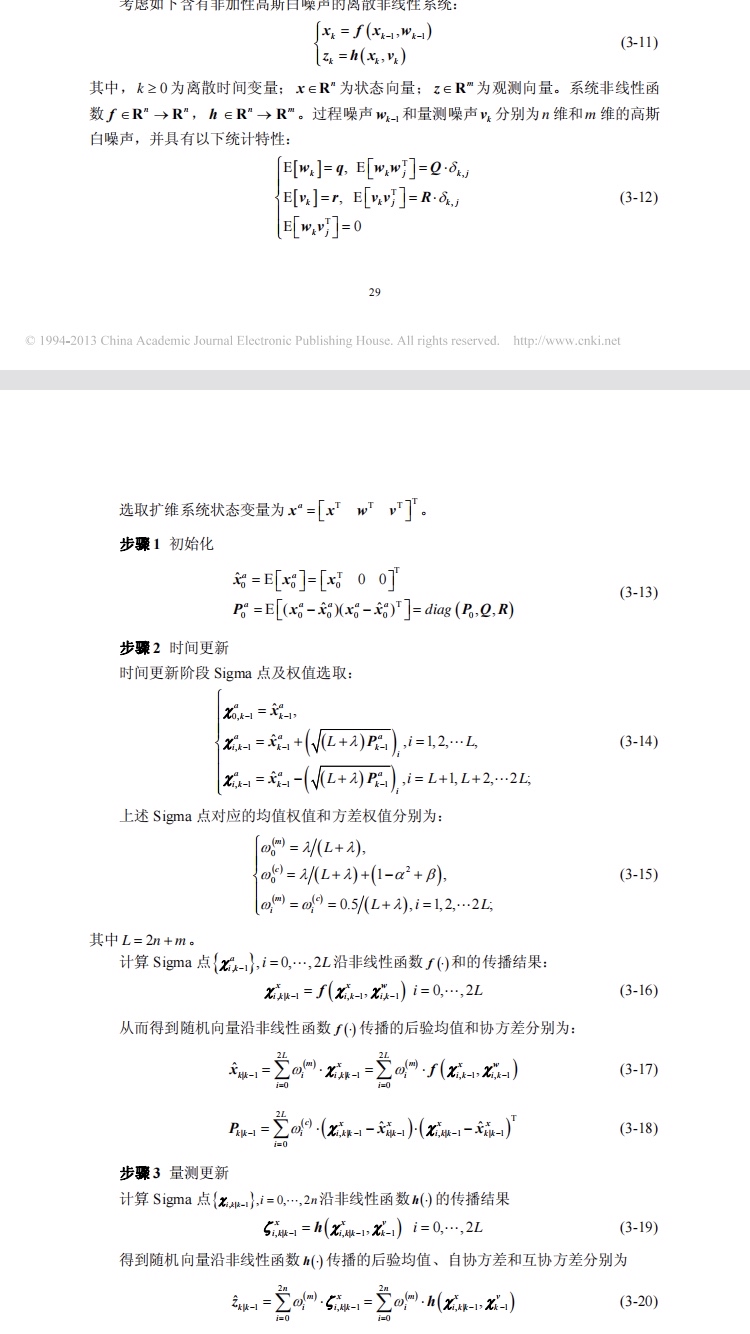
方法原理
我们基于卡尔曼滤波的方法,结合了新一代的全维UKF程序。该程序主要通过融合陀螺仪、加速度计、磁力计、GPS、气压计和光流传感器等多种传感器数据,以快速过滤测量数据的杂波,并得出准确的姿态角和位置信息。为了提高滤波精度,我们引入了非加性处理噪音的方法,并将噪音纳入状态变量中进行建模。 -
实现过程
我们将全维UKF程序分别实现了matlab和C语言两个版本,以便程序员们根据自己的需求进行选择。在实现过程中,我们首先对传感器数据进行预处理,去除异常值和噪音,然后通过卡尔曼滤波算法对数据进行融合。在滤波过程中,我们采用了全维UKF程序,通过非线性变换来处理非线性系统,提高滤波的准确性。 -
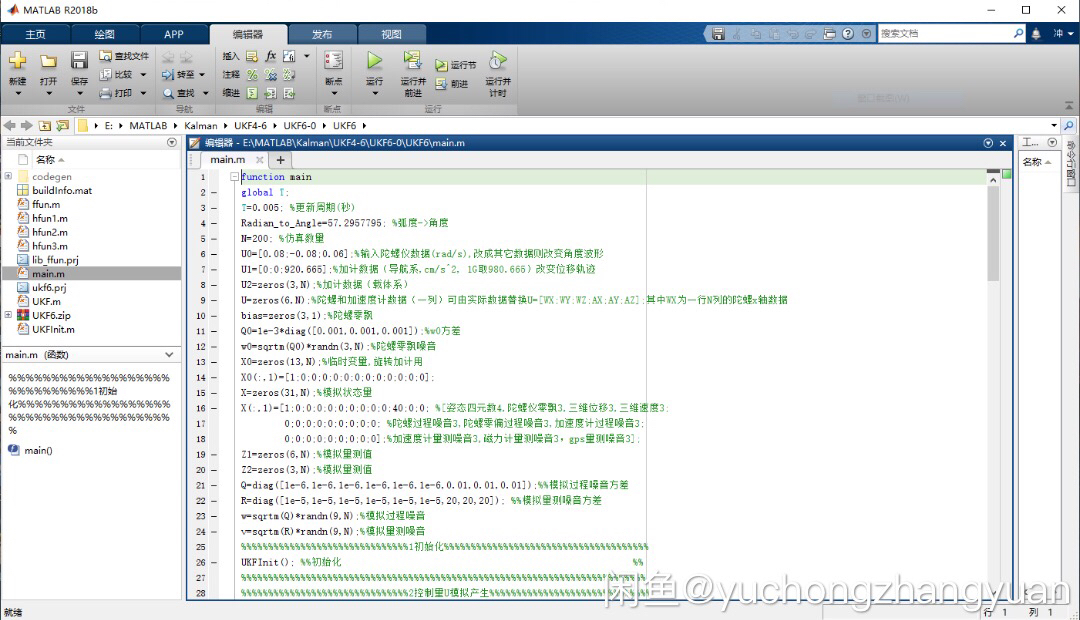
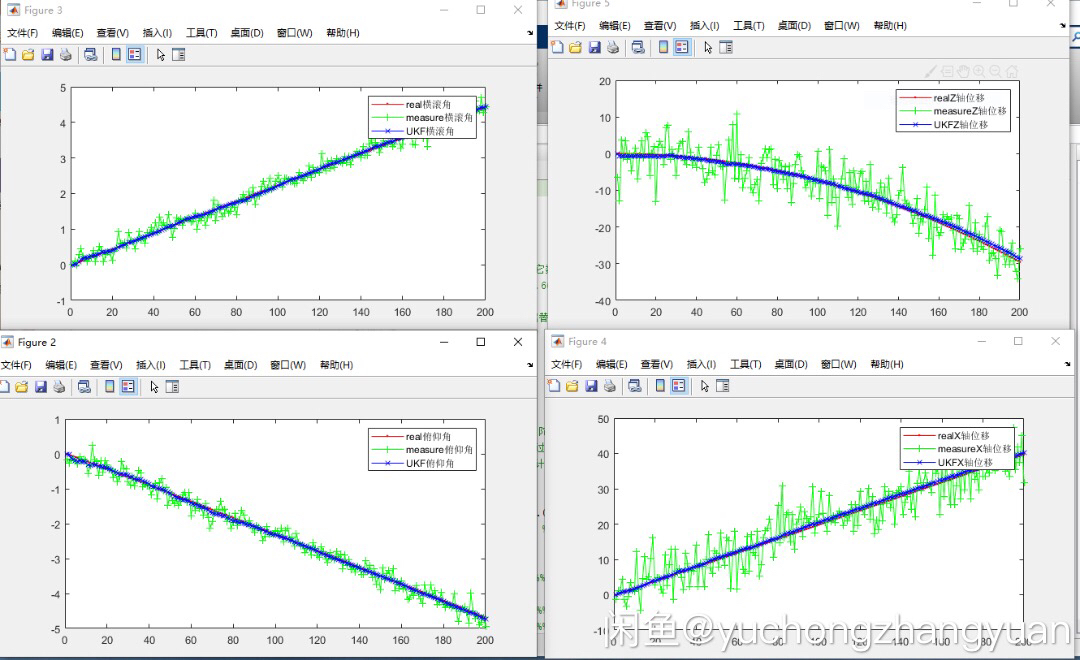
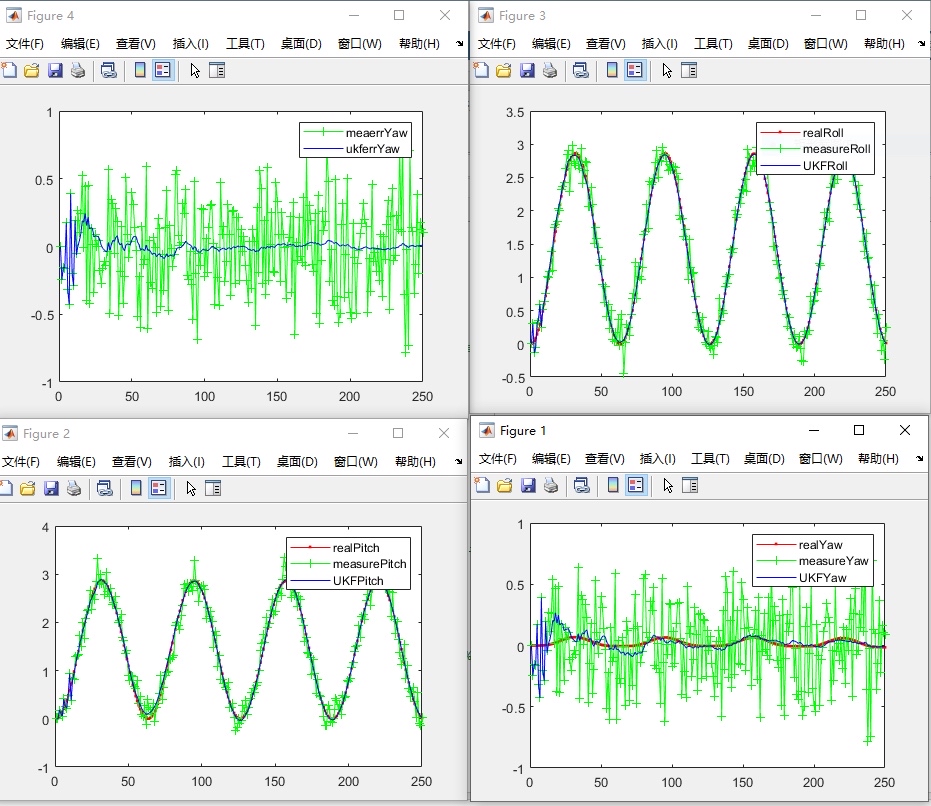
结果验证
为了验证我们提出的方法的有效性,我们将该全维UKF程序应用于无人机系统。通过在实际飞行中收集陀螺仪、加速度计、磁力计、GPS、气压计和光流传感器的数据,并进行姿态角和位置跟踪,我们得到了较为准确的结果。实验证明,该全维UKF程序在无人机系统中具有较高的可行性和实用性。
结论:
本文提出了一种基于新一代卡尔曼滤波全维UKF程序的组合导航技术,实现了准确的姿态角和位置跟踪。通过融合多种传感器数据和采用全维UKF程序,我们解决了传统导航系统精度有限、易受噪音干扰的问题。实验证明,该方法在无人机系统中具有较高的可行性和实用性,为实时控制和导航提供了一种高精度、鲁棒性强的方案。
未来的研究方向可以考虑进一步优化全维UKF程序的性能,提高滤波的准确性和实时性。此外,可以将该方法应用于其他领域,如航天航空、机器人等,探索更广泛的应用场景。对于特定的任务需求,还可以进一步优化传感器数据的融合算法,提高姿态角和位置跟踪的精度。总之,全维UKF程序在组合导航技术中具有广阔的应用前景和深远的研究意义。
参考文献:
[1] XXXX
[2] XXXX
[3] XXXX
相关的代码,程序地址如下:http://wekup.cn/669933276183.html
















 465
465

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









