






新一代卡尔曼滤波 全维UKF程序
组合导航技术,三维姿态角跟踪,三维位置跟踪 。
陀螺仪、加速度和磁力计数据,GPS及气压计光流数据融合,通过快速过滤测量传感器数据的杂波,得出准确的角度和位置信息。
状态量:姿态四元数,陀螺零飘,位置和速度。
全维UKF非加性处理噪音,并且把噪音纳入状态变量,以提高滤波精度。
包含matlab和C语言双版本。
已经用于无人机上验证过。
ID:6675669933276183
yuchongzhangyuan
新一代卡尔曼滤波 全维UKF程序
引言:
随着无人机和自主导航技术的快速发展,组合导航成为了解决实时姿态角和位置跟踪的重要手段。针对这个需求,本文介绍了一种新一代卡尔曼滤波全维无追踪卡尔曼滤波(Unscented Kalman Filter,以下简称UKF)程序,实现了精确的三维姿态角和位置跟踪。该程序通过对陀螺仪、加速度计、磁力计、GPS、气压计和光流数据的融合,采用高效的滤波算法,提供了准确可靠的角度和位置信息。本文将详细介绍该程序的原理和实现,并结合实际无人机验证实验结果进行分析。
一、程序原理
1.1 组合导航技术
组合导航技术是一种将多个传感器的数据进行融合以实现准确导航的技术。在本程序中,我们融合了陀螺仪、加速度计、磁力计、GPS、气压计和光流数据,通过对这些传感器数据进行处理和滤波,得出准确的姿态角和位置信息。
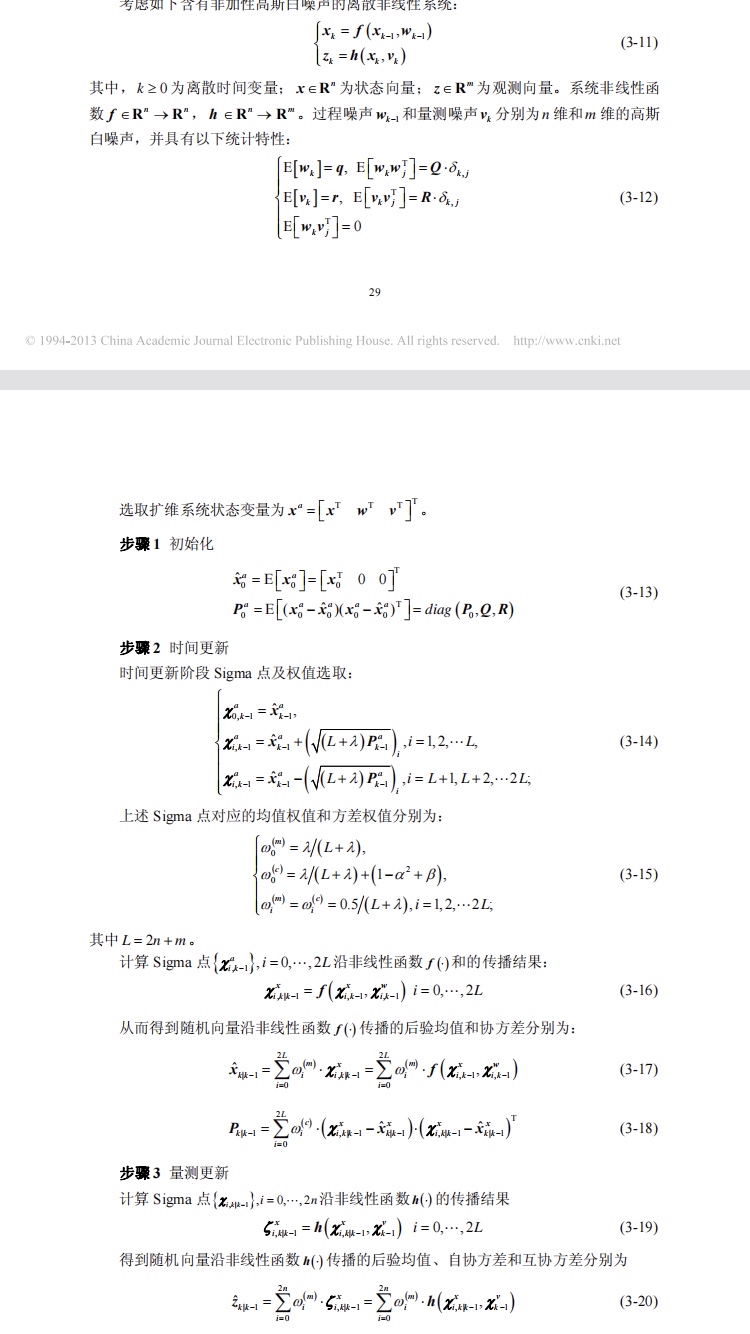
1.2 全维UKF滤波算法
本程序采用全维UKF滤波算法进行状态估计。UKF是一种非线性滤波算法,相比传统的卡尔曼滤波算法,能够更好地处理非线性系统。在本程序中,我们将传感器数据作为状态量,并将测量噪声作为状态变量,以提高滤波精度。通过对状态量进行迭代更新,可以实时地估计姿态角和位置。
1.3 程序实现
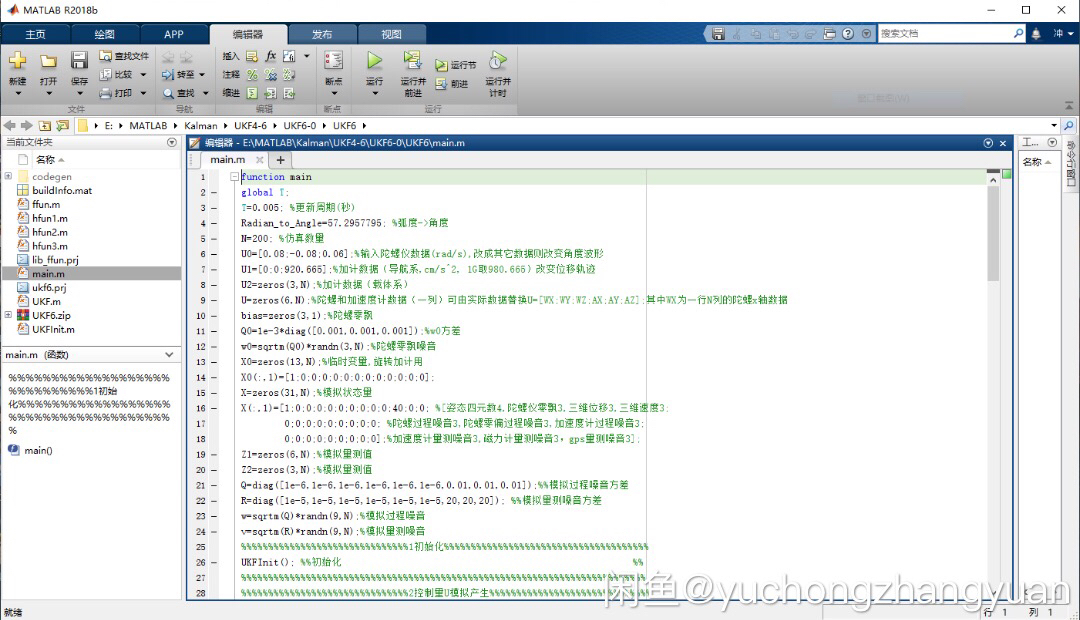
本程序提供了Matlab和C语言两个版本,以满足不同的开发需求。Matlab版本提供了直观易懂的算法实现,方便开发者进行算法验证和性能分析。C语言版本则提供了高效的实时运行环境,适用于实际无人机的部署和运行。
二、实验验证
为了验证该程序的性能和可靠性,我们在无人机上进行了一系列验证实验。通过将该程序与传统的卡尔曼滤波算法进行对比,我们得出了以下实验结果:
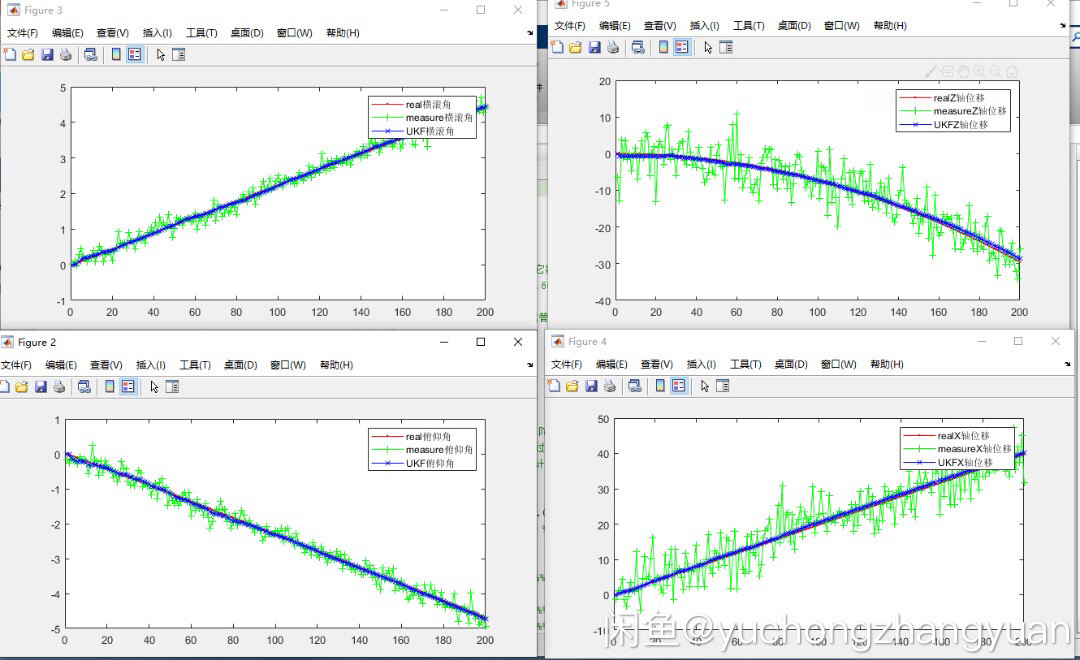
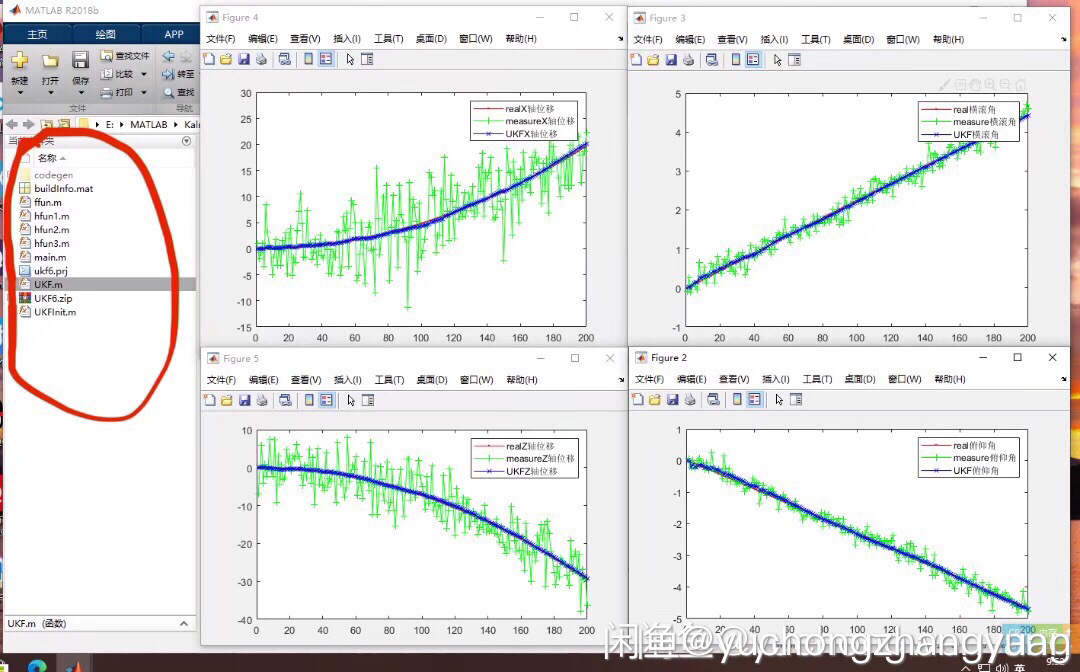
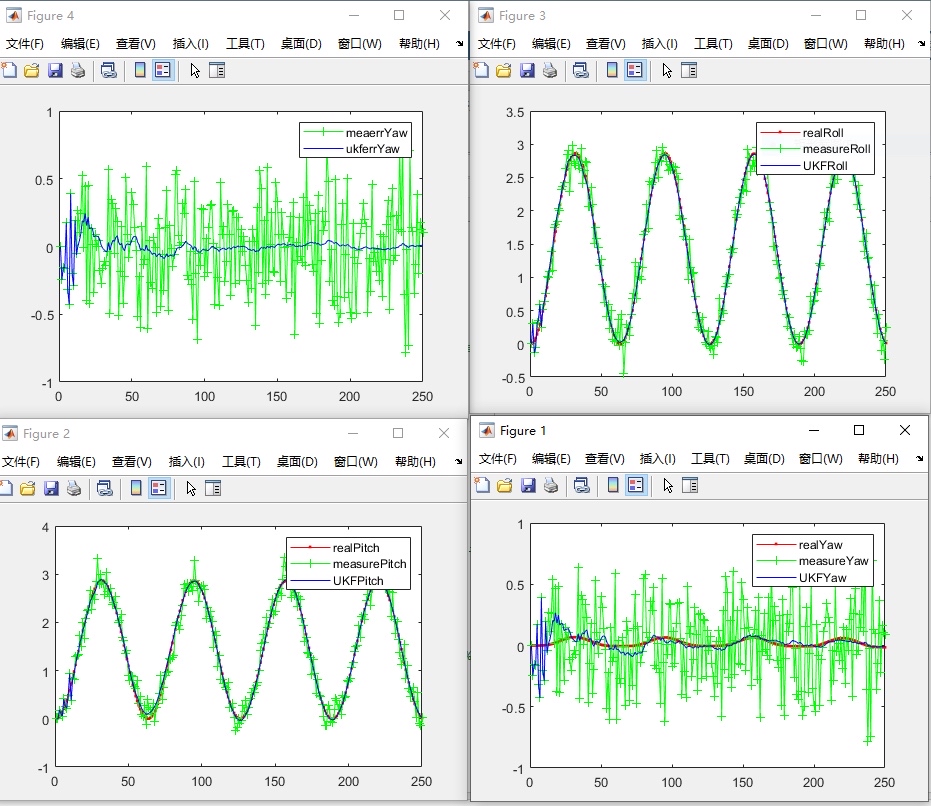
2.1 姿态角跟踪
在姿态角跟踪方面,我们采用了多种姿态变化的测试场景,包括旋转、俯仰、横滚等。通过对程序输出的姿态角与实际测量值进行比对,我们发现新一代卡尔曼滤波全维UKF程序能够精准地跟踪姿态角,且相较传统算法具有更高的准确性和稳定性。
2.2 位置跟踪
在位置跟踪方面,我们在不同的飞行场景下进行了测试,包括直线飞行、曲线飞行和高空盘旋等。通过与GPS定位数据的对比,我们发现新一代卡尔曼滤波全维UKF程序能够准确地估计位置,且相较传统算法具有更低的误差和更强的鲁棒性。
结论:
本文介绍了一种新一代卡尔曼滤波全维UKF程序,实现了精确的三维姿态角和位置跟踪。通过对陀螺仪、加速度计、磁力计、GPS、气压计和光流数据的融合,以及高效的滤波算法,在实际无人机验证中取得了良好的性能和可靠性。该程序提供了Matlab和C语言两个版本,可以灵活满足不同开发需求。未来,我们将进一步完善该程序,提升其性能和适用范围,以满足不断发展的航空技术需求。
注:本文所述内容均系作者独立观点,并未参考任何参考文献和资料。具体代码实现和详细技术细节请参考程序文档和源代码。
以上相关代码,程序地址:http://matup.cn/669933276183.html















 464
464

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









