







二、配置选项卡
上位机软件给咱们提供了很多的设置选项,最好是按照从上到下的方式进行设置,因为有些选项或者是参数之间具有一些联系,设置了某些选项之后,其它选项有可能会发生变化,具体的看下面的介绍。
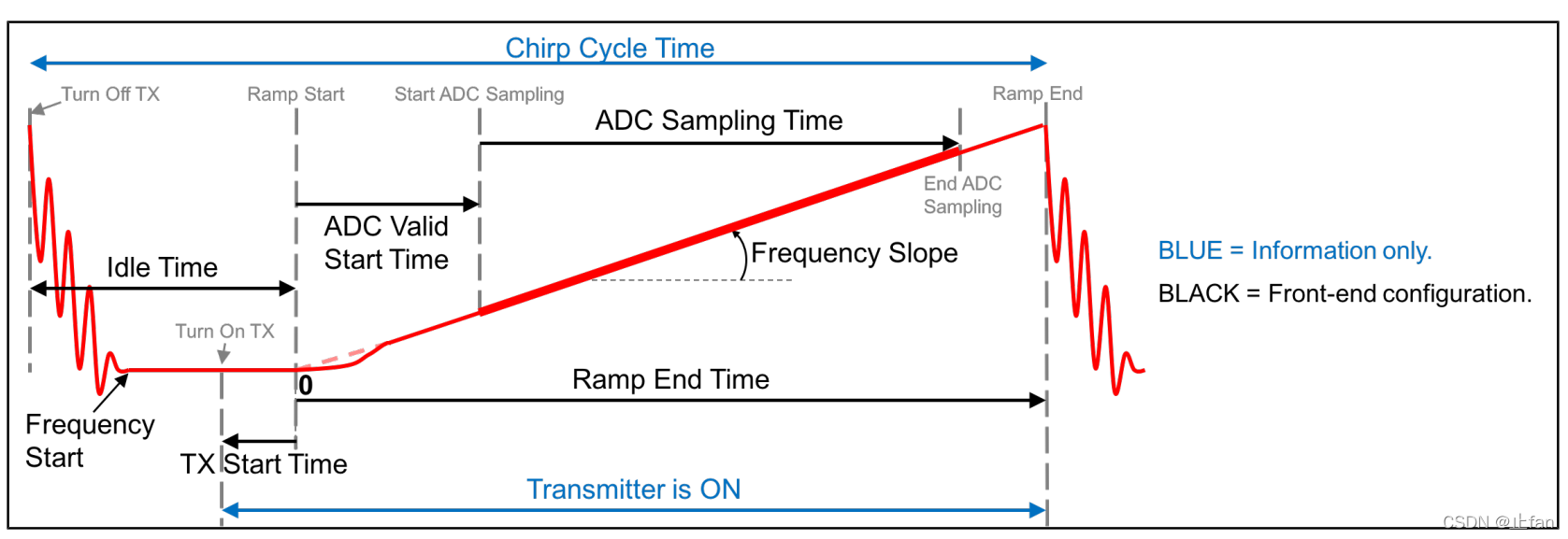
下面的这些配置都可以通过命令行的形式进行配置,为了方便大家对配置的内容的理解,所以贴图一张,此图来源于mmwave_sdk_user_guide,读者可以自行下载。该文档对于命令的配置有更详尽的说明。
2.1 平台(Platform)
这个是必须优先选择的,下拉菜单的形式,用的哪个平台就选择哪个。
2.2 SDK版本(SDK version)
要选择正确的SDK的版本,否则会出错,这个跟少录的文件,使用的芯片有关系,保存设置文件(Save Config To PC)的时候并没有提示选择版本,应该是保存了一个兼容的设置。
2.3 天线设置(Antenna Config (Azimuth Resolution - Degrees))
这里的下拉菜单可以设置收、发天线的数量,用于设置角分辨率还有俯仰角,具体的角度分辨率跟板卡上面的天线的排布有关。
需要注意的是,这个选项卡对下面的最大探测距离(Maximum Unambiguous Range
)和最大探测速度(Maximum Radial Velocity)的最大和最小值有影响。当我们选择了Elevation选项之后,就会有3D的散点图,这个还是挺有意思的。软件还支持命令行的方式对天线进行选择,可以使用channelCfg加掩码的方式来进行设置。还有就是如果要改变天线设置的话,必须要重启芯片后才能配置下去,否则会报错。
2.4 理想配置(Desirable Configuration)
软件预先给设计了一个配置,用户可以通过下拉菜单进行选择最关心的数据,一共有3个选项,分别是,最佳范围分辨率(Best Range Resolution),最佳速度分辨率(Best Velocity Resolution),和最佳范围(Best Range)。设置的时候最好按照下面章节的顺序进行设置。
2.5 带宽(Frequency Band (GHz))
有两种带宽可以选择,4GHz和1GHz。可以根据需要进行选择。
命令行模式也可以进行配置,在profileCfg里面进行配置。
2.6 场景选择——最佳范围分辨率(Scene Selection – Best Range Resolution)
本节将介绍用户在选择“最佳范围分辨率”的时候,应该遵循的选择顺序。
2.6.1 帧率(Frame Rate (fps))
滑块的方式进行选择,选择器件以何种帧率进行输出,注意这里不是指的波形的帧率。
这个选项控制着最大径向速度滑块上的最小值。更快的速率限制了可以从毫米波设备上,捕获的绘图和测量数据的数量。
命令行模式中,在 frameCfg 命令中定义帧持续时间(例如,以 ms 为单位的帧周期)
2.6.2 范围分辨率(Range Resolution)
可以通过滑块来配置范围分辨率,分辨率的单位是米,这个选项对于最大的探测范围,最大的径向速度有一定的影响,可以自己试一试。
命令行模式,频率的斜率和调频时长(us)在profileCfg中进行设置。
2.6.3 最大明确范围(Maximum Unambiguous Range)
如果想要看到更远的距离,那就选择更大的值,这个选项对速度的分辨率有影响,这个数值越小,速度分辨率的选项将会更多,也就是能做到更高的速度分辨率,反之亦然。
命令行模式,在 profileCfg 命令中以 ksps 定义 ADC 采样数和 ADC 采样频率。
2.6.4 最大径向速度(Maximum Radial Velocity (m/s))
可以根据需要选择能测量的最大的径向速度,这个值越大,速度的分辨率越差,反之亦然。
命令行模式,在 profileCfg 命令中以 µs 为单位定义空闲时间。
2.6.5 径向速度分辨率(Radial Velocity Resolution (m/s))
这个选项一般只可以选择,它受前面所有选项的影响。
命令行模式,定义 frameCfg 命令中的循环数
2.7 场景选择——最佳速度分辨率(Scene Selection – Best Velocity Resolution)
2.7.1 帧率(Frame Rate (fps))
功能和2.6.1一样,不同的是,在最佳速度分辨率的选项前提下,它控制着速度的分辨率、最大速度中的最低值,更快的帧率限制了可以从毫米波设备捕获的绘图和测量数据的数量。
命令行模式中,在 frameCfg 命令中定义帧持续时间(例如,以 ms 为单位的帧周期)
2.7.2 径向速度分辨率(Radial Velocity Resolution (m/s))
在最佳速度分辨率配置的前提下,帧率确定的情况下,径向速度分辨率基本上是一个定值。
2.7.3 最大径向速度(Maximum Radial Velocity (m/s))
由于是最大径向速度优先,所以会对距离分辨率有影响。
最大径向速度调整的比较低的话,最大明确范围还可以调整的更高一些,如果最大径向速度调整到最大值的话,最大明确范围就只能很小了。
命令行模式中,定义 frameCfg 命令中的循环数。
2.7.4 范围分辨率(Range Resolution)
低分辨率,会有更大的最大明确范围,反之最大明确范围则变小。
命令行模式中,Range Resolution 和 Max Unambiguous Range 在 profileCfg 命令中,受 ADC 采样数、频率斜率常数、斜坡结束时间(以 µs 为单位)、空闲时间(以 µs 为单位)和 ADC 采样频率(以 ksps 为单位)因素的影响。
2.7.5 最大明确范围(Maximum Unambiguous Range)
在速度最优的情况下,这个范围基本上是固定的,只可以微调,而且这个值和范围分辨率是相关的。
命令行模式中,同2.7.4.
2.8 场景选择——最佳范围(Scene Selection – Best Range)
这个选项是我们把范围当作是最优选项,在这个前提下进行设置。
2.8.1 帧率(Frame Rate (fps))
这个滑块的变动,影响最大径向速度的最小值。
更快的帧率限制了可以从毫米波设备捕获的绘图和测量数据的数量。
命令行模式中,在 frameCfg 命令中定义帧持续时间(例如,以 ms 为单位的帧周期)
2.8.2 最大明确范围(Maximum Unambiguous Range)
以5米为阶梯进行设置
范围越大,范围分辨率越低,范围越小,范围分辨率越高。
命令行模式中,profileCfg中的频率斜率影响。
2.8.3 范围分辨率(Range Resolution)
同2.8.2种的内容一样,范围分辨率和最大明确范围反方向变化。
命令行模式中,Range Resolution 和 Max Unambiguous Range 在 profileCfg 命令中,受 ADC 采样数、频斜坡结束时间(以 µs 为单位)和 ADC 采样频率(以 ksps 为单位)因素的影响。
2.8.4 最大径向速度(Maximum Radial Velocity (m/s))
最大径向速度越大,速度分辨率越低,最大径向速度越小,速度分辨率越高。
命令行模式中,受profileCfg中的idle time空闲时间影响。
2.9 图表选择(Plot Selection)
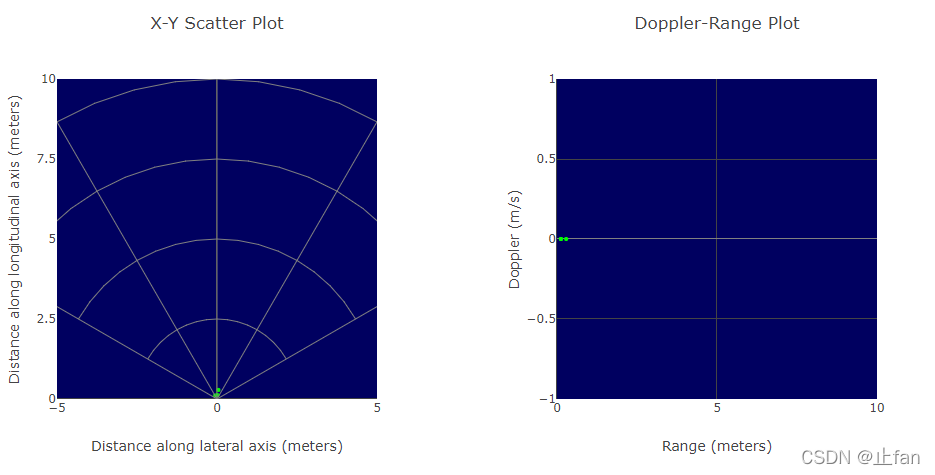
2.9.1 散点图Scatter Plot
选择这个复选框之后,就可以看到散点图和距离多普勒图像(一维多普勒)
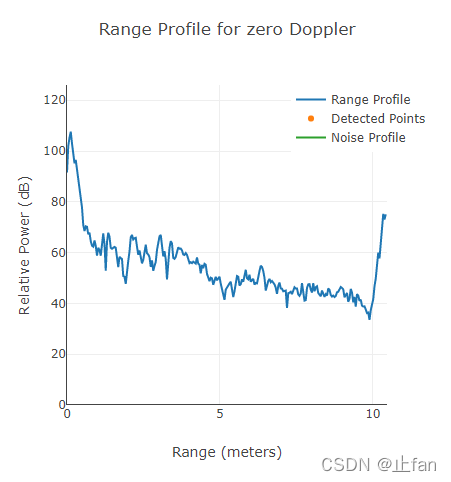
2.9.2 范围配置(距离配置)Range Profile
这个选项可以让我们看到0度多普勒增益强度和距离之间的关系。
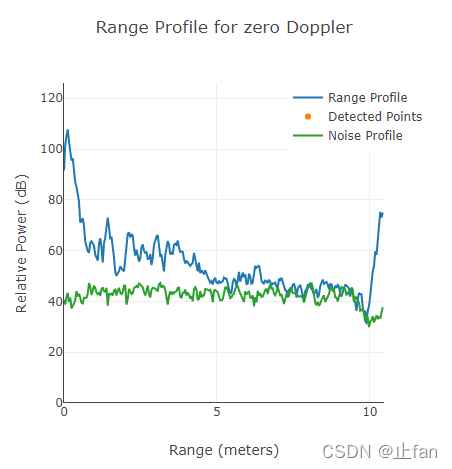
2.9.3 噪声配置(距离配置)Noise Profile
选择这个后,噪声的波形就会出现在2.9.2的波形里面,绿色的就是噪声的波形。
2.9.4 范围方位角热图 Range Azimuth Heat Map
选中这个选项,会绘制一个范围方位角的热图,会讲目标绘制在图表里面。颜色越红表示目标越大。选择这个选项的话,手册建议帧率设置为1fps,这样能够有有充足的帧周期把信息通过UART传递出来。不过测试了一下,帧率稍微大一点也行,基本上别超过5pfs。

2.9.5 距离多普勒热图 Range Doppler Heat Map
这个选项手册也是要求1fps,原因同2.9.4。选中的话,会传递出来距离多普勒热图。这个图会显示出来目标距离雷达的距离,还有相对应的速度值,还是颜色越红表示目标越大。
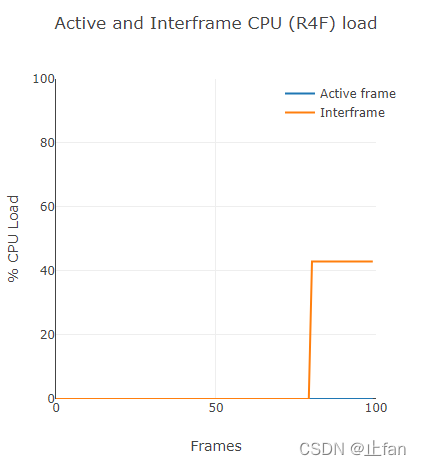
2.9.6 统计数据 Statistics
这个图表是统计CPU负载的,用处感觉不太大,生成热图的时候,负载还是挺大的。
2.10 用户选择配置User Selected Configuration
上面的选项都配置完成之后,就可以下发配置了
2.10.1 将配置发送到毫米波芯片 Send Configuration to mmWave Device
这里没什么可以写的,连接好端口,设置好合理的参数,然后点击左下角的send按钮就可以发送配置了,发送如果成功的话,在右边的Console Message窗口会有返回的信息,如果没有发送成功,就再发一次。
2.10.2 保存配置文件到电脑上 Saving Configuration to PC
如果觉得设置的参数挺好,想保存下来也可以,
2.10.3 重置选择 Reset Selection
如果胡乱设置,导致设置乱了的话,也可以重置选择,这个功能挺方便,尤其对于新手。
第二章配置到此就讲完了,期待第三章,码字不易,多多支持。

















 564
564

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









