







 在Python中通过串口与Arduino进行通信时遇到问题,发送数据后无法接收到回应。经过排查,发现原因是串口连接建立需要时间。在发送数据前加入`time.sleep(3)`等待连接稳定,解决了收发数据不畅的问题。
在Python中通过串口与Arduino进行通信时遇到问题,发送数据后无法接收到回应。经过排查,发现原因是串口连接建立需要时间。在发送数据前加入`time.sleep(3)`等待连接稳定,解决了收发数据不畅的问题。
项目中需要用python通过串口给Arduino发送指令。还是面向百度编程,查询到以下方案
Arduino代码
#define adapterPort 3
void setup() {
Serial.begin(9600);
pinMode(adapterPort,OUTPUT);
}
void loop() {
if (Serial.available()>0){
char serialData=Serial.read();
if(serialData=='H'){
digitalWrite(adapterPort,HIGH);
Serial.print(serialData);
delay(800);
}
if(serialData=='L'){
digitalWrite(adapterPort,LOW);
Serial.print(serialData);
delay(800);
}
}
}通过Arduino的串口监视器发送指令,可以成功执行并返回数据
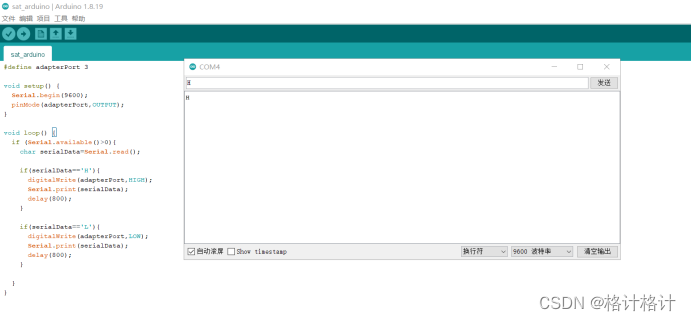
接下来通过python编写串口通信代码实现和Arduino的数据通信
Python代码
import serial
import time
arduino_serial = serial.Serial("COM4", 9600, timeout=0.5)
arduino_high=b'H'
arduino_low=b'L'
arduino_serial.write(arduino_high)
print(arduino_serial.readline())
# arduino_serial.write(arduino_low)
# print(arduino_serial.readline())
arduino_serial.close()奇怪的事情发生了,在发送完数据之后python端就是接收不到数据
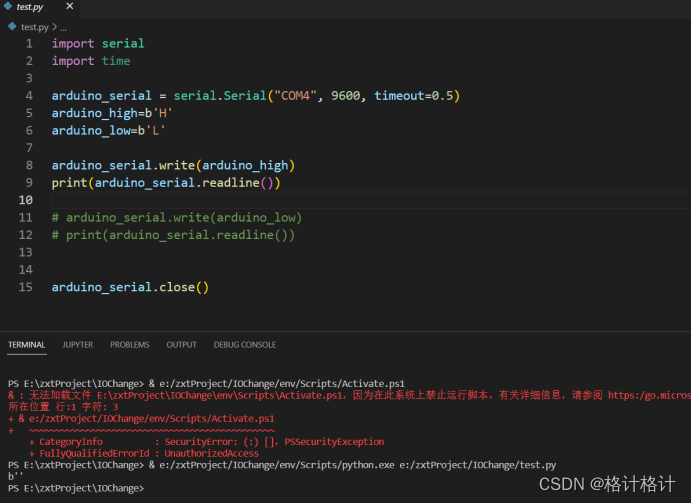
试了各种方法,甚至都去看串口的底层原理了,还是不行,真不知道网上那些人是怎么通过那千篇一律的代码跑成的。
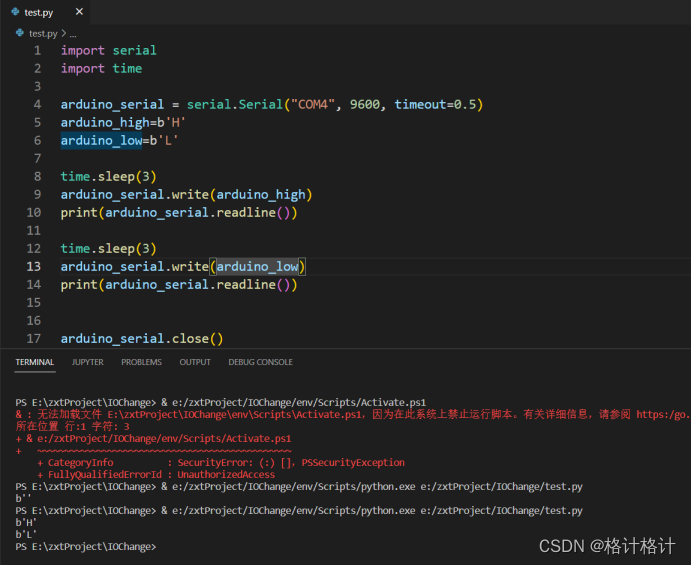
1000 years later......发现仅仅是需要加一行time.sleep()代码
import serial
import time
arduino_serial = serial.Serial("COM4", 9600, timeout=0.5)
arduino_high=b'H'
arduino_low=b'L'
time.sleep(3)
arduino_serial.write(arduino_high)
print(arduino_serial.readline())
time.sleep(3)
arduino_serial.write(arduino_low)
print(arduino_serial.readline())
arduino_serial.close()接着就能正常收发数据了,原因很简单,串口连接的建立是需要时间的,网上的代码,在串口建立代码后直接发消息,这时候连接都还没建立完成呢,发过去的消息当然没回应。所以在建立连接之后sleep(3)等连接建立完成之后再发送消息,这样就可以了。



















 932
932

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











