







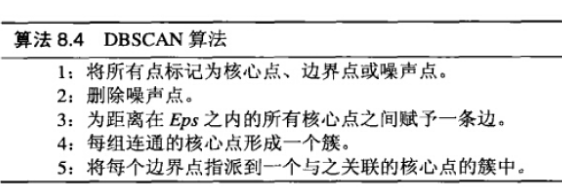
DBSCAN的核心思想是从某个核心点出发,不断向密度可达的区域扩张,从而得到一个包含核心点和边界点的最大化区域,区域中任意两点密度相连。
 邻域:对任意一个点p,其邻域定义为:
邻域:对任意一个点p,其邻域定义为: 。
。
密度:设 ,则
,则 为
为 的密度。
的密度。
核心点:设,若 ,则称为
,则称为 中的中心点,中心点构成的集合为
中的中心点,中心点构成的集合为。
边界点:设 ,且落在某个核心点的邻域内。一个边界点可能落在多个核心点的邻域内。
,且落在某个核心点的邻域内。一个边界点可能落在多个核心点的邻域内。
直接密度可达:设 ,若满足
,若满足 且
且 ,则称
,则称 从直接密度可达。
从直接密度可达。
密度可达:假设存在一串点 ,使得
,使得 从
从 是直接密度可达的,那么就认为
是直接密度可达的,那么就认为 从
从 密度可达。
密度可达。
密度相连:假设存在点 ,其中
,其中 均从
均从 密度可达,那么和密度相连。密度相连具有对称性。
密度可达,那么和密度相连。密度相连具有对称性。
类簇:设非空集合 ,若满足:
,若满足:
(1) ,且从密度可达,那么
,且从密度可达,那么 。
。
(2)和密度相连。则称 构成一个类簇。
构成一个类簇。
缺点:DBSCAN使用了统一的 邻域值和
邻域值和 值,在类中的数据分布密度不均匀时,较小时,密度小的cluster会被划分成多个性质相似的cluster;较大时,会使得距离较近且密度较大的cluster被合并成一个cluster。在高维数据时,因为维数灾难问题,的选取比较困难。
值,在类中的数据分布密度不均匀时,较小时,密度小的cluster会被划分成多个性质相似的cluster;较大时,会使得距离较近且密度较大的cluster被合并成一个cluster。在高维数据时,因为维数灾难问题,的选取比较困难。
优点:能发现任意形状的聚簇,聚类结果几乎不依赖于结点遍历顺序,能够有效的发现噪声点。















 1054
1054

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









