







做为拍照手机的核心模块之一,camera sensor 效果的调整,涉及到众多的参数,如果对基本的光学原理及 sensor 软/硬件对图像处理的原理能有深入的理解和把握的话,对我们的工作将会起到事半功倍的效果。
人眼对色彩的识别,是基于人眼对光谱存在三种不同的感应单元,不同的感应单元对不同波段的光有不同的响应曲线的原理,通过大脑的合成得到色彩的感知。一般来说,我们可以通俗的用RGB三基色的概念来理解颜色的分解和合成。以下是正常的RGB光谱:
但是,实际情况并没有如此理想,下图表示了人眼的三色感应系统对光谱的响应情况,可见RGB的响应并不是完全独立的。

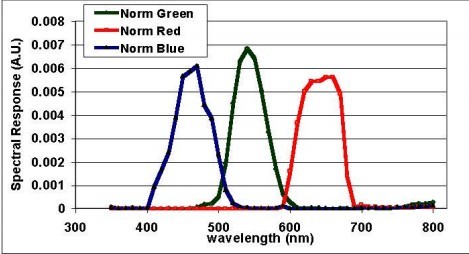
下图则表示了 Kodak 某相机光谱的响应。可见其与人眼的响应曲线有较大的区别。

既然我们已经看到sensor 对光谱的响应,在RGB各分量上与人眼对光谱的响应通常是有偏差的,当然就需要对其进行校正。不光是在交叉效应上,同样对色彩各分量的响应强度也需要校正。通常的做法是通过一个色彩校正矩阵对颜色进行一次校正。 如下:

该色彩校正的运算通常由ISP 完成,软件通过修改相关寄存器得到正确的校正结果。值得注意的一点是,由于 RGB -> YUV的转换也是通过一个 3*3 的变换矩阵来实现的,所以有时候这两个矩阵在 ISP 处理的过程中会合并在一起,通过一次矩阵运算操作完成色彩的校正和颜色空间的转换。















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









