







矩阵的掩膜操作
- 获取图像像素指针
- CV_Assert(myImage.depth()==CV_8U);
- Mat.ptr(int i = 0)获取像素矩阵的指针,索引i表示第几行,从0开始计行数.
- ptr(point)指针,unchar一个字节
- 获取的是地址,而不是一个具体的值
- 获得当前行指针const uchar* current = myImage.ptr(row);
- 获取当前像素点P(row,col)的像素值p(row,col) = current[col]
- 像素范围处理saturate_cast
* 在0~255返回正常值,小于0返回0,大于255返回255
- 这个函数的功能是确保RGB值的范围在0~255之间
- saturate_cast(-100),返回0.
- saturate_cast(288),返回255
- saturate_cast(100),返回100
- 这个函数的功能是确保RGB值的范围在0~255之间
- 掩膜(mask)操作
- 如3*3,即邻域操作
- I(i,j)=5*I(i,j)-[I(i-1,j)+I(i+1,j)+I(i,j-1)+I(i,j+1)]
- 通过掩膜操作重新计算每个像素值,提高图像的对比度
//获取图像的高度跟宽度
int cols = (src.cols-1)*src.channels(); //实际的col值为图像col*图像的通道数
int offsetx = src.channels(); //开始的像素
int rows = src.rows; //图像宽度
//不能在原图像上输出
dst = Mat::zeros(src.size(), src.type()); //目标图像初始化,把图像全都变成0
//zeros(),生成的图像跟输入图像的类型跟大小一致,颜色为黑色
//掩膜遍历
for (int row = 1; row < rows - 1; row++) { //row从1开始,把最左上角排除
//获取每一个通道对应的指针
const uchar* previous = src.ptr<uchar>(row - 1);//上一行
const uchar* current = src.ptr<uchar>(row); //当前行
const uchar* next = src.ptr<uchar>(row + 1); //下一行
uchar* output = dst.ptr<uchar>(row);
for (int col = offsetx; col < cols; col++) {
//掩膜计算,对output进行赋值
//左右漂移多少是由通道数目offsetx决定的,上下漂移为1,这里用预先定义好的previous和next
//掩膜I(i,j)=5*I(i,j)-[I(i-1,j)+I(i+1,j)+I(i,j-1)+I(i,j+1)]
output[col] = saturate_cast<uchar>(5 * current[col] - (current[col - offsetx] + current[col + offsetx]
+ previous[col] + next[col]));
}
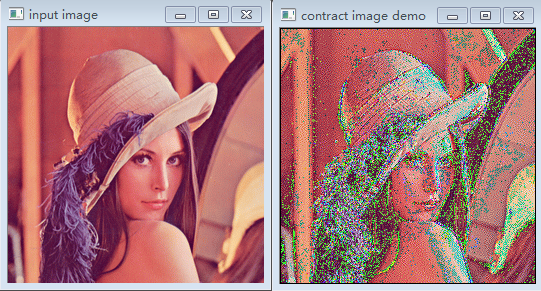
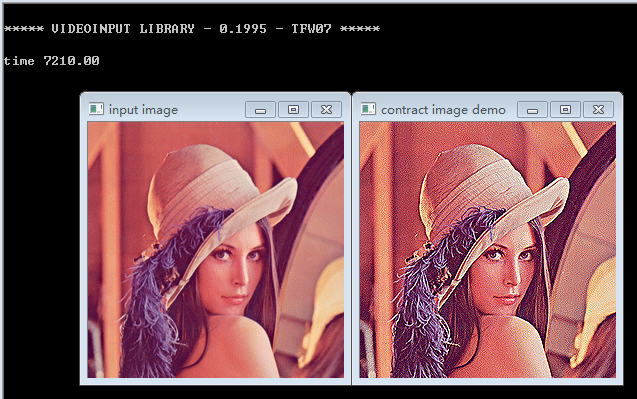
}图像像素需要控制在0~255之间,否则会发生截取现象,使图像出现斑点,因此需要加上前面提到的saturate_cast<uchar>来控制像素的范围
以下是不加saturate_cast<uchar>的原图和对比度变换后的图像
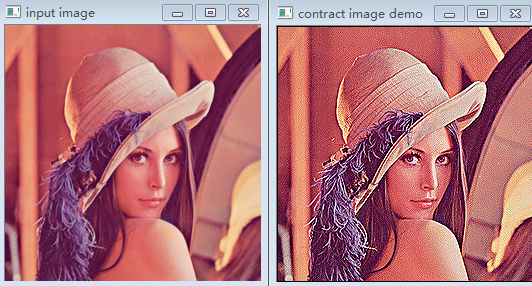
加上saturate_cast<uchar>后的原图和对比度变换后的图像
OpenCV中调用函数filter2D来实现图像的掩膜操作
* `filter2D(src,dst,src.depth(),kernel)`;
* src.depth表示位图的深度,有32位,24位,8位等
* 此值不知道的话传-1就行,暗示跟输入图像的位图深度一致
* 定义掩膜:
* Mat kernel = (Mat_<char>(3,3)<<0,-1,0,-1,5,-1,0,-1,0);
Mat kernel = (Mat_<char>(3, 3) << 0, -1, 0, -1, 5, -1, 0, -1, 0); //定义掩膜
filter2D(src, dst, src.depth(), kernel); //filter2D给啥掩膜就会执行什么操作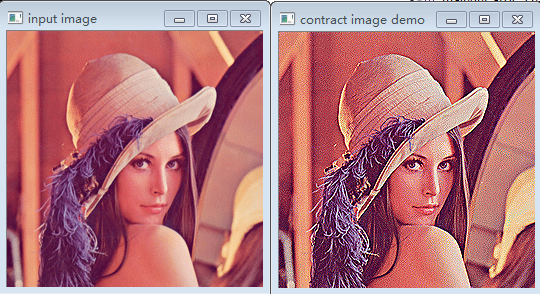
* getTickCount(),获取执行时间
* 通过此可以计算算法的执行效率
double t = getTickCount(); //获取执行时间
Mat kernel = (Mat_<char>(3, 3) << 0, -1, 0, -1, 5, -1, 0, -1, 0); //定义掩膜
filter2D(src, dst, src.depth(), kernel); //filter2D给啥掩膜就会执行什么操作
//t = getTickCount() - t; //当前的执行时间=总共的执行时间-前面的执行时间
double timeconsume = (getTickCount() - t) / getTickCount();//时间消费
printf("time consume %.2f" ,timeconsume);掩膜算法所用的时间:
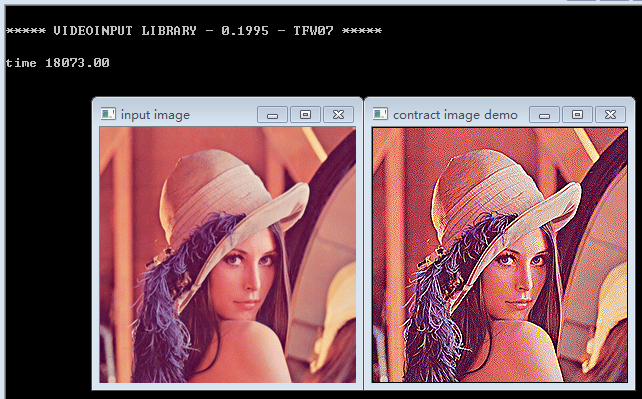
OpenCV_API方法所用的时间:
从时间性能来说,OpenCV中的算法比经典的掩膜算法用的时间少,(从肉眼的感官来讲OpenCV里的算法…好吧,我看花眼了,一开始看着opencv的要好点,然后又变的一样了)由此可见OpenCV里面的算法还是具有很强的应用性的














 361
361











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









