






探索未来智能制造:耦合迭代细化在6D多物体姿态估计中的应用
Coupled-Iterative-Refinement项目地址:https://gitcode.com/gh_mirrors/co/Coupled-Iterative-Refinement
在当今的工业4.0浪潮中,精确的物体定位和识别成为了自动化和机器人技术的核心。为此,我们特别向您推荐一个前沿的开源项目——耦合迭代细化(Coupled Iterative Refinement),这是为了解决复杂的6D多物体姿态估计问题而生的技术解决方案。本项目源于CVPR 2022的一篇重要论文,由 lahavlipson 等人开发。
项目介绍
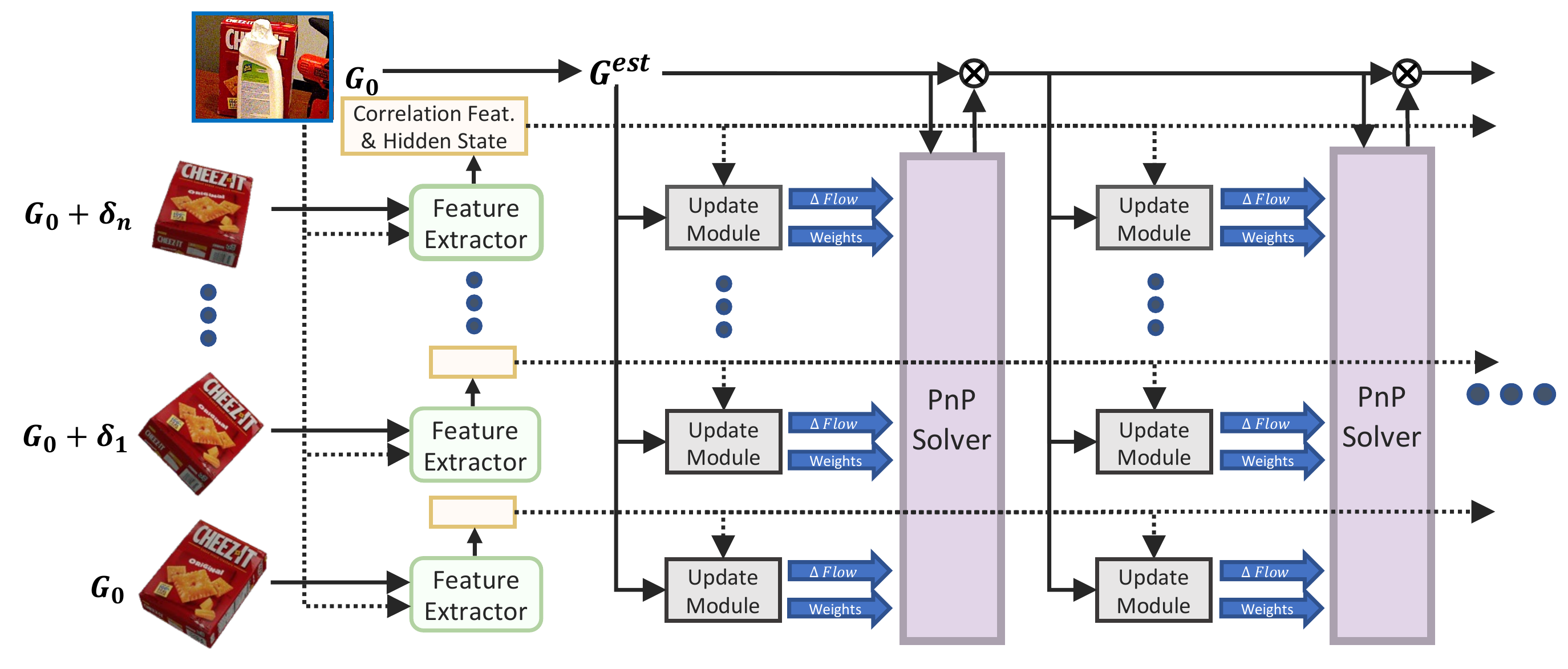
耦合迭代细化是针对6D姿态估计领域的创新方法,它通过高效的迭代过程,优化了对多个物体在三维空间中的位置和旋转角度的预测。这一突破性工作不仅提升了准确性,还展现了在复杂环境下的鲁棒性,适用于广泛的工业应用和自动驾驶场景。
技术深度剖析
此项目采用了先进的人工智能算法,特别是专为RGB-D图像设计的深度学习模型。通过耦合不同层次的迭代优化步骤,该框架能够从初始的粗略估计逐步提升到精确的6D姿态。模型利用了深度神经网络的强大表示力,结合迭代的精炼策略,确保了即便是在密集或多样的物体环境中也能实现精确的识别和定位。
应用场景广泛
耦合迭代细化技术的应用前景广阔,尤其适用于以下几个领域:
- 自动化装配线:精准定位零件,提高生产效率。
- 无人仓储系统:自动分拣和堆放物品,减少错误率。
- 无人驾驶车辆:准确感知环境中的障碍物和特定目标,保证安全行驶。
- 增强现实(AR):实现实时的物体跟踪与交互,提升用户体验。
项目特点
- 高效迭代:采用迭代精炼机制,逐步提升定位精度。
- 多数据融合:支持RGB-D数据,结合颜色和深度信息以增强性能。
- 全面适用性:预训练模型覆盖多个主流物体识别数据库,如YCB-Video、T-LESS等,便于即刻应用。
- 开源友好:提供详尽的文档、代码以及训练和评估脚本,便于研究者和开发者快速上手。
- 可扩展性:基于强大的Cosypose库构建,易于集成新的检测器和模型。
开始探索
对于希望利用或进一步研究这项技术的工程师和研究人员,只需遵循官方GitHub仓库提供的说明,即可轻松搭建环境并运行演示。无论是进行科学研究还是产品开发,耦合迭代细化都将是您的强大工具。
加入这场视觉感知技术的革新之旅,探索多物体姿态估计的新境界。通过该项目,不仅可以加深对高级计算机视觉技术的理解,还能推动实际应用向前发展,为自动化和智能化进程贡献力量。
本项目不仅仅是一个学术研究的成果展示,更是一个开启新可能性的钥匙,邀请所有对精确识别和定位技术感兴趣的实践者共同参与,一起探索未来科技的无限可能。
Coupled-Iterative-Refinement项目地址:https://gitcode.com/gh_mirrors/co/Coupled-Iterative-Refinement
















 99
99

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











