







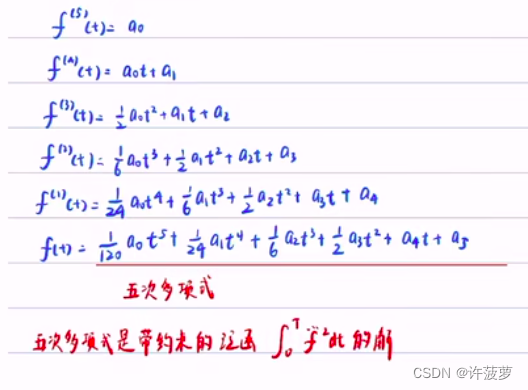
1.五次多项式
衡量规划控制好坏的标准是舒适度,物理意义为跃度,用英文表示为 Jerk
J
a
r
k
=
d
a
d
t
Jark = \frac{da}{dt}
Jark=dtda
设有一个质点的轨迹为
s
=
f
(
t
)
s = f(t)
s=f(t)
则
J
a
r
k
=
d
3
f
d
t
3
Jark = \frac{d^{3} f}{dt^{3}}
Jark=dt3d3f
其中 a 为加速度,加速度的导数越平缓则代表车辆越舒适
因为加速度是分正负的,所以转换为微分可以表示为,寻找一个
f
(
t
)
f(t)
f(t) 使得
m
i
n
∫
0
T
(
d
3
f
d
t
3
)
2
d
t
min\int_{0}^{T} (\frac{d^{3} f}{dt^{3}})^{2}dt
min∫0T(dt3d3f)2dt
所以,积分
m
i
n
∫
0
T
(
d
3
f
d
t
3
)
2
d
t
min\int_{0}^{T} (\frac{d^{3} f}{dt^{3}})^{2}dt
min∫0T(dt3d3f)2dt 是一个关于 f(t) 的泛函,积分的值取决于 f(t) 的整体形状
2.五次多项式的推导
因为积分取了平方,所以要想让该值最小
(
d
3
f
d
t
3
)
(\frac{d^{3} f}{dt^{3}})
(dt3d3f) 只能取 0,那么三阶导为 0 ,f(t) 只能是一个二次或者二次以下的多项式
在现实的智能驾驶中 f(t) 带有 6 个约束
为了满足这 6 个约束,Jerk 只能是一个五次多项式
s = f(t) 进行泰勒展开

然后将约束条件带入
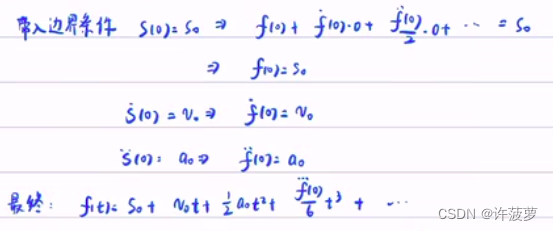
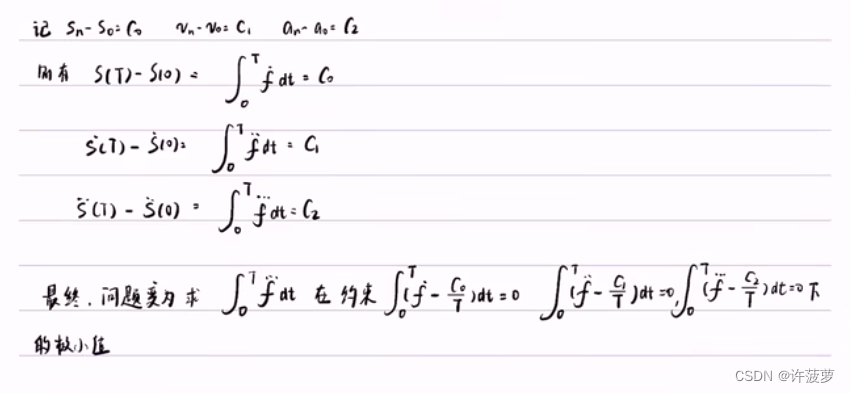
对边界条件进行恒等变形

再将其进行转换
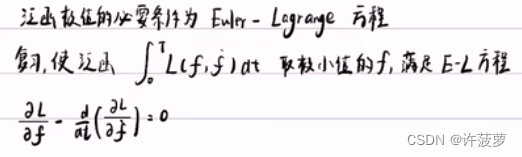
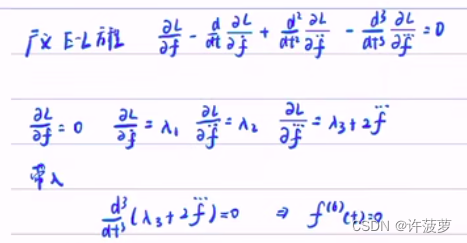
3.欧拉-拉格朗日方程计算泛函极值
1.欧拉-拉格朗日公式
2.计算 Jerk 的极值
S1:
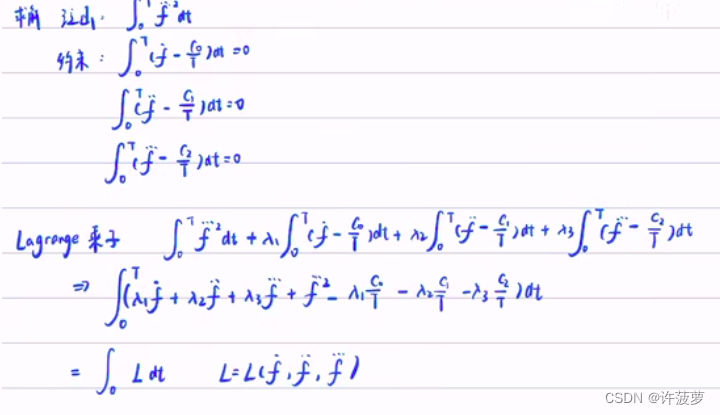
S2:















 2674
2674

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









