






直线插补 圆弧插补 步进电机二维直线插补圆弧插补控制算法 C语言 STM32移植
YID:8919637989218203
嵇***兵

直线插补、圆弧插补、步进电机、二维直线插补和圆弧插补控制算法、C语言、STM32移植,这些关键词和短语无疑引领着现代工控领域的发展方向,其在机械系统控制方面的应用越来越广泛。本文将围绕这些关键词展开,从理论到实践探讨直线插补、圆弧插补以及步进电机的控制算法,并探究如何在C语言和STM32上进行移植。
一、引言
随着工业自动化的快速发展,机械系统控制成为工业生产中不可或缺的一环。直线插补和圆弧插补作为常用的控制算法,能够实现机械系统在二维坐标系中的运动控制,为工业生产提供了更高的准确性和效率。而步进电机作为一种常用的执行器,广泛应用于各种机械系统中。本文将从直线插补、圆弧插补和步进电机的控制算法入手,讨论在C语言和STM32上的移植方法。
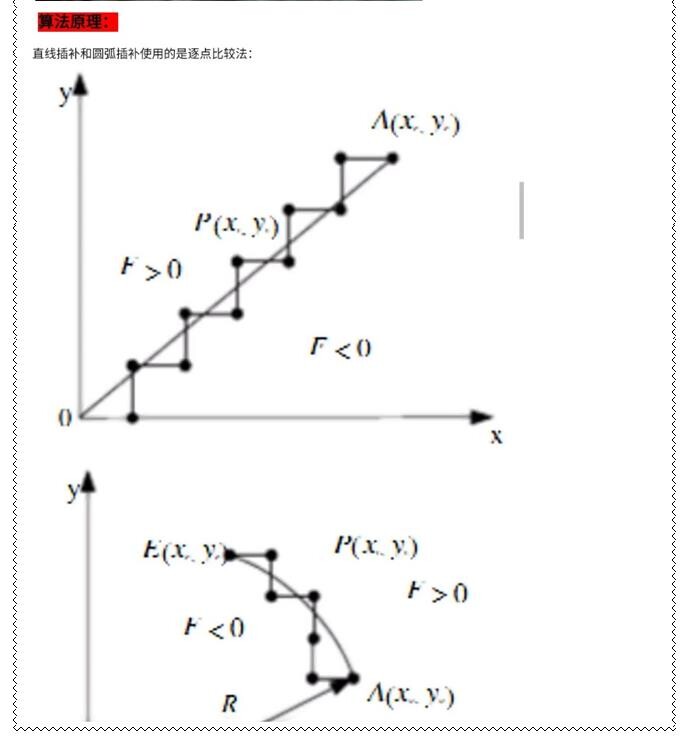
二、直线插补算法
直线插补算法是实现机械系统直线运动控制的核心。在二维坐标系中,通过给定起点和终点的坐标值,可以通过直线插补算法计算出机械系统在运动过程中各点的坐标值。常用的直线插补算法有线段扫描算法、Bresenham算法等。本文将介绍Bresenham算法,并给出相应的C语言实现方式。
三、圆弧插补算法
圆弧插补算法是在直线插补算法的基础上进一步发展而来的。通过给定起点、终点和中间点的坐标值,圆弧插补算法能够计算出机械系统在运动过程中各点的坐标值,从而实现圆弧路径的控制。常用的圆弧插补算法有圆心插补算法、圆弧分段插补算法等。本文将介绍圆心插补算法,并给出相应的C语言实现方式。
四、步进电机控制算法
步进电机作为一种常用的执行器,其控制算法对于机械系统的性能影响重大。步进电机的控制算法分为开环控制和闭环控制两种。开环控制算法简单高效,适用于速度要求不高的场景;闭环控制算法则能够提供更好的控制精度和稳定性,适用于对控制精度要求较高的场景。本文将介绍开环控制算法和闭环控制算法,并且针对步进电机的特性,给出了在C语言和STM32上的移植方法。
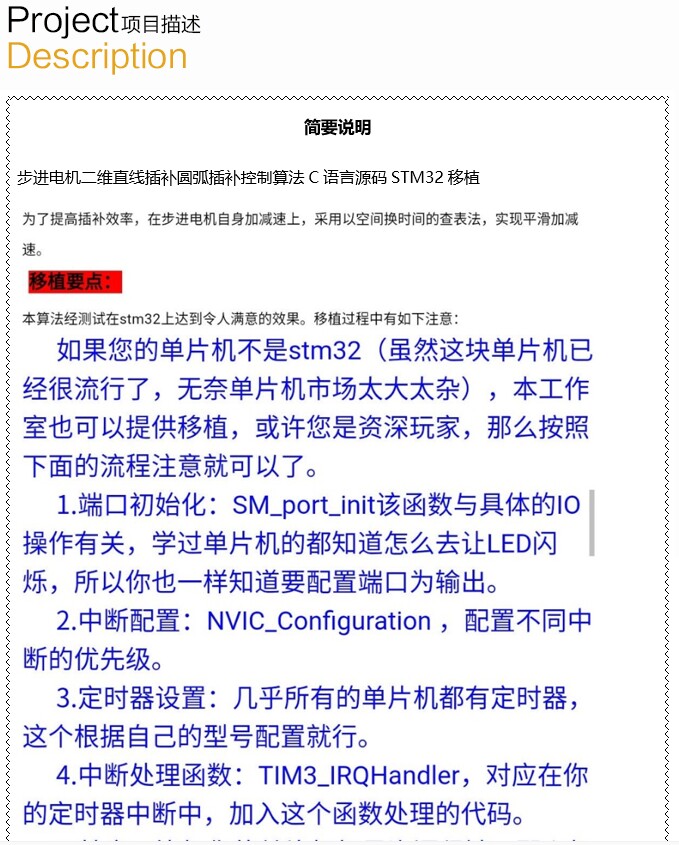
五、C语言和STM32上的移植
C语言作为一种通用的编程语言,具有跨平台、易于开发和维护的特点,广泛应用于嵌入式系统开发中。而STM32作为一款强大的ARM Cortex-M系列微控制器,具有丰富的外设资源和强大的计算能力,适用于各种工控应用场景。本文将介绍如何在C语言和STM32上对直线插补、圆弧插补和步进电机控制算法进行移植,并给出相应的代码示例。
六、结论
本文围绕直线插补、圆弧插补、步进电机和STM32移植等关键词展开,从理论到实践,详细介绍了直线插补算法、圆弧插补算法和步进电机控制算法的原理及其在C语言和STM32上的移植方法。通过对这些关键技术的深入分析和研究,可以为工控领域的开发者提供有益的参考和指导,促进工业自动化的进一步发展。
参考:
[1] Bresenham J E. Algorithm for computer control of a digital plotter[J]. IBM Systems Journal, 1965, 4(1): 25-30.
[2] 汪建国, 涂意春. 步进电机闭环控制算法[J]. 山东轻工业学院学报(自然科学版), 2007, 21(4): 10-14.
[3] 王大鹏, 张乾. 嵌入式系统软硬件设计与C语言应用[M]. 清华大学出版社, 2008.
[4] STM32微控制器产品系列. [在线]. Available: https://www.st.com/zh/microcontrollers-microprocessors/stm32-32-bit-arm-cortex-mcus.html
以上相关代码,程序地址:http://wekup.cn/637989218203.html















 540
540

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









