







 本文对比了树莓派4B在32位与64位系统下的性能表现,测试包括OpenMP素数计算、视频播放、sysbench基准测试及Octave浮点运算等。结果显示,64位系统在多项测试中展现出明显优势。
本文对比了树莓派4B在32位与64位系统下的性能表现,测试包括OpenMP素数计算、视频播放、sysbench基准测试及Octave浮点运算等。结果显示,64位系统在多项测试中展现出明显优势。
RaspberryPi 4 采用了Broadcom BCM2711处理器,是一块64位芯片。然而,目前官网的RaspberryPI OS 考虑到处理器兼容性,都是基于32位的Debain Arm架构。之前一直看到网上说,官方的64位测试版性能提升,但没有试过。此次下载了64位的官网镜像,进行了测试,不比不知道,一比吓一跳。特此记录。
1 树莓派4B介绍
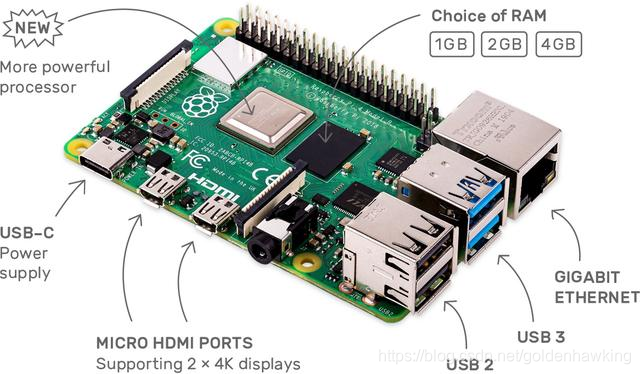
树莓派4B 是一款采用了博通BCM2711处理器的Arm64卡片计算机。从一些资料来看,与其说它是一种单片机或者开发板,不如说是一个PC机。1
首先因为它的价格、能耗、接口、功能都更像PC机,另外就是它的硬件并不是完全开放的,不能说是一个友好的开发板。这个板子作为学习简单的Arm架构开发,控制一些基于串口、USB、GPIO的硬件设备,还是不错的选择。
| 项目 | 参数 |
|---|---|
| 核心 | CPU:Broadcom BCM2711,1.5 GHz,64-bit,4核心,ARM Cortex-A72 架构,1MB shared L2 cache RAM:1、2、4 GB LPDDR4-3200 RAM (shared with GPU) |
| 网络 | 以太网:10/100/1000 Mbit/s 无线网:b/g/n/ac 双频 2.4/5 GHz 蓝牙:5.0 |
| 多媒体 | GPU:Broadcom VideoCore VI @ 500 MHz HDMI:micro-HDMI DSI:板载排线 |
| 外围设备 | 17× GPIO plus the same specific functions, HAT, and an additional 4× UART, 4× SPI, and 4× I2C connectors |
这个板子的性能已经显著与STM32单片机产生质的区别,接口特性也基本符合PC机的范畴。事实上,树莓派的本意也不是做单片机,而是做所有人都买得起的计算机,普及不发达地区的计算机教育。因此,它的大量驱动也是独一份,人家压根没有想到给第三方厂家复刻。
2 64位系统尝试
树莓派官方系统是RaspberryPi OS,一款在Debain上深度定制的操作系统。为了兼容各代硬件,尽管4代已经高配到8GB RAM,官方仍旧没有推出64位的发行版。目前,64位的发行版只推出了 Beta,因为仍旧有以下问题没有解决:
- 视频加速驱动,Chrome和VLC只能软件播放。(经测试,区别不大)
- 没有Wolfram Mathematica 软件(这个很要命)。2
不过,随着官方开发团队的不断努力,目前VLC已经释出,且Chrome的性能和32位上也没有大的差异。
从网址https://downloads.raspberrypi.org/raspios_arm64/images/下载最新镜像,写入SD卡后,即可尝试该系统。
笔者选取的是V30的256GB高速SD卡,8G顶配版本,附带铝合金被动散热。
2.1 OpenMP素数快速求取,15倍
我们使用笔者写的OpenMP素数求取程序,分别在同一个配置、不同操作系统下运行,对比如下:
32位系统:
Batch 1048576 ,80214 primes, last Primer: 1114111 , 576613 / s
Batch 1053160 ,73684 primes, last Primer: 2167261 , 381935 / s
Batch 1103492 ,74527 primes, last Primer: 3270737 , 309095 / s
Batch 1134620 ,74723 primes, last Primer: 4405381 , 275835 / s
Batch 1157146 ,75096 primes, last Primer: 5562517 , 243509 / s
Batch 1174788 ,75119 primes, last Primer: 6737317 , 223804 / s
Batch 1189280 ,75257 primes, last Primer: 7926593 , 212956 / s
Batch 1201576 ,75247 primes, last Primer: 9128153 , 199646 / s
64位系统:
Batch 1048576 ,80214 primes, last Primer: 1114111 , 3755886 / s
Batch 1053160 ,73684 primes, last Primer: 2167261 , 3778342 / s
Batch 1103492 ,74527 primes, last Primer: 3270737 , 3590787 / s
Batch 1134620 ,74723 primes, last Primer: 4405381 , 3515944 / s
Batch 1157146 ,75096 primes, last Primer: 5562517 , 3331344 / s
Batch 1174788 ,75119 primes, last Primer: 6737317 , 3254026 / s
Batch 1189280 ,75257 primes, last Primer: 7926593 , 3138231 / s
Batch 1201576 ,75247 primes, last Primer: 9128153 , 3041471 / s
速度相差 15倍!
2.2 视频播放,几乎一制
1920x1080,CPU 20%-40%,两个操作系统基本没有差别。


2.3 sysbench,6倍
需要注意,64位镜像暂时需要从源码编译sysbench.
32Bit:
pi@rbp4bgh:~ $ sysbench --test=cpu --cpu-max-prime=20000 run --num-threads=4
sysbench 0.4.12: multi-threaded system evaluation benchmark
Running the test with following options:
Number of threads: 4
Doing CPU performance benchmark
Threads started!
Done.
Maximum prime number checked in CPU test: 20000
Test execution summary:
total time: 63.2772s
total number of events: 10000
total time taken by event execution: 253.0857
per-request statistics:
min: 24.49ms
avg: 25.31ms
max: 73.81ms
approx. 95 percentile: 26.10ms
Threads fairness:
events (avg/stddev): 2500.0000/4.58
execution time (avg/stddev): 63.2714/0.00
64bit:
sysbench cpu --cpu-max-prime=20000 run --threads=4
sysbench 1.1.0-5657d59 (using bundled LuaJIT 2.1.0-beta3)
Running the test with following options:
Number of threads: 4
Initializing random number generator from current time
Prime numbers limit: 20000
Initializing worker threads...
Threads started!
CPU speed:
events per second: 2244.41
Throughput:
events/s (eps): 2244.4124
time elapsed: 10.0017s
total number of events: 22448
Latency (ms):
min: 1.70
avg: 1.78
max: 21.47
95th percentile: 2.14
sum: 39980.16
Threads fairness:
events (avg/stddev): 5612.0000/74.63
execution time (avg/stddev): 9.9950/0.00
2.4 Octave 浮点矩阵求逆,2倍
32
a=rand(800,800);tic;p=pinv(a);toc;
Elapsed time is 28.9755 seconds.
64
a=rand(800,800);tic;p=pinv(a);toc;
Elapsed time is 12.3227 seconds.
3 小结
由于笔者的2块SD卡容量不同,没有做性能比对。不过,从开机速度来看,64位比32位快了3倍多。建议有条件的小伙伴直接上64位的OS!



















 1955
1955

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











