







 文章介绍了如何使用51单片机通过定时器生成PWM来控制直流电机的五级速度,并通过LED显示速度等级。同时,利用电机的脉冲输出进行测速,结果显示在LCD1602屏幕上,实现了正反转及速度显示功能。
文章介绍了如何使用51单片机通过定时器生成PWM来控制直流电机的五级速度,并通过LED显示速度等级。同时,利用电机的脉冲输出进行测速,结果显示在LCD1602屏幕上,实现了正反转及速度显示功能。
实现的功能如下:可以通过按键调节电机的速度,有5个速度等级,每个等级都有一个LED与之对应,LED指示当前属于什么速度等级。可以通过一个单刀开关控制电机的正反转。同时正反转也有LED指示灯与之对应。同时,电机的速度也可以测量,将测到的速度显示在LCD1602上。
首先给出整体的电路图吧

控制直流电机速度的思路是产生PWM波,用PWM控制其速度。PWM的占空比越大,电机的速度就越快。51单片机不像32单片机,有PWM输出模式。但是51单片机有定时器,我们可以利用这个定时器来人工产生PWM。
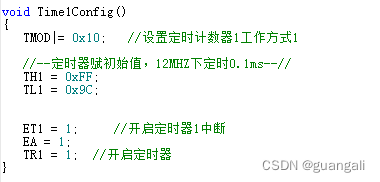
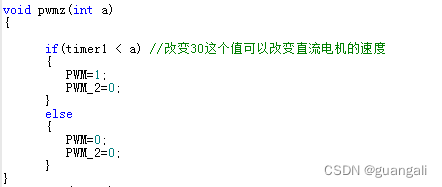
51单片机定时器产生PWM的代码如下:

![]()
首先配置定时器。使其0.1ms产生一次中断,然后每次中断对timer1这个变量++,加到100又让它清0,那么timer1这个量一直在0-100这个范围内变换。然后在pwmz()这个函数里面,将timer1和传入的参数a作比较,由于timer1一直在变化但是a一旦被选定了就是固定的,那么通过调整a,就能调整PWM输出的高电平时间,也就是控制PWM的占空比。
51单片机测速的代码如下:
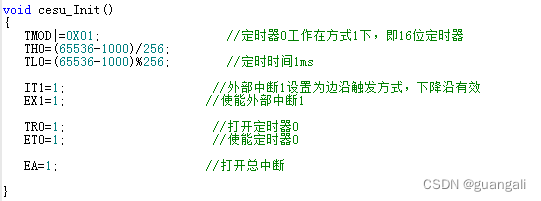

测速思路如下:我选用的电机每转一圈会输出24个脉冲,将这个脉冲输出脚接到单片机的外部中断管脚,并且在外部中断服务函数里面记录脉冲数。然后使用定时器0,产生1ms的中断。在定时器0的中断服务函数里面 记录时间。当时间过去1S时,读取外部中断所记录的脉冲数,然后再通过数学关系就可以得到转速了。
需要完整工程的 请私信!!

















 2686
2686











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











