







1.项目功能
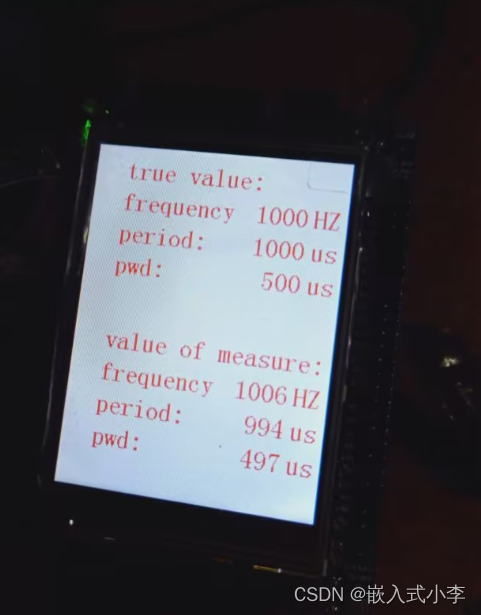
配置stm32自带的定时器,以一定的周期产生中断,在中断服务函数里面,对某个IO口进行取反,这样就在该管脚上产生了一定频率的方波(频率可以用按键调节)。然后再使用stm32的捕获功能,对产生的方波进行测量,可以得到它的高电平时间,就推算出了周期,进而得出频率!
频率设定值,和频率测量值都能在LCD屏幕上显示。实物图如下所示:
2. 发展前景
随着现代电子技术的不断发展,单片机频率计的应用范围也在不断扩大,未来的发展前景是非常广阔的。以下是一些可能的发展趋势:
1. 更高的精度和稳定性:由于一些应用场合对频率计的精度和稳定性要求更高,因此,未来的单片机频率计可能会使用更高精度的时钟、更高精度的测量方法和更高质量的器件,以提供更准确、更稳定的测量结果。
2. 更高的采样率:由于一些应用场合需要更高的频率测量精度,未来的单片机频率计可能会提供更高的采样率和更高的计数分辨率。
3. 更多的功能:除了基本的频率测量功能外,未来的单片机频率计可能还会提供更多的功能,例如波形分析、频谱分析等,以满足不同场合的需求。
4. 更广泛的应用:单片机频率计可以广泛应用于各种领域,如无线通信、自动化控制、仪器仪表、航空航天、医疗设备等。随着技术的不断进步,单片机频率计在这些领域的应用也将不断拓展。
总之,单片机频率计作为一种集成度高、功能强大、成本低廉的测量工具,未来的发展前景非常广阔。
3.研究意义
STM32单片机频率计作为一种常见的数字转换和测量设备,具有很多研究意义,如下:
1. 提高计时测量精度和准确度:单片机频率计采用数字计数器进行计数,可以最大限度地消除数字转换误差和模拟电路中信号漂移的影响,从而提高测量精度和准确度。
2. 研究单片机计数器计数模式:单片机计数器有很多计数模式,不同的模式可以满足不同测量需求。研究这些模式的特点和应用,可以更好地发挥单片机计数器的优势。
3. 探究计算频率和周期的算法:单片机可以通过计算脉冲数量和时间间隔,计算出输入信号的频率和周期。研究相应的运算法则和算法,可以提高测量的速度和准确度。
4. 探索单片机处理信号的能力:单片机可以通过各种算法和处理方法,提取出输入信号的很多特征。通过深入研究其处理信号的能力,可以进一步发掘单片机在信号处理方面的潜力。
5. 集成单片机测量系统:单片机频率计可以集成到测量系统中,用于对不同信号的测量和处理。研究单片机频率计在系统级集成中的应用,可以提高整个测量系统的智能化和自动化程度。
综上所述,STM32单片机频率计的研究意义非常重大,有助于提高测量精度和准确度,发现新的处理信号方法,集成测量系统等,为计量仪器行业的发展做出贡献。
4.项目源码
基于stm32f407的频率计设计资源-CSDN文库 https://download.csdn.net/download/guangali/88628630
https://download.csdn.net/download/guangali/88628630



















 1217
1217

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











