








目标:
根据现状的OD分布量、交通小区的经济特征、土地利用的发展变化,预测未来各交通小区间的出行量。
The trip distribution model is concerned with matching trip origins(productions)and trip destinations (attractions). The main output of this stage is O-D matrices by trip purpose.
需要调查得到的数据:
需要知道现在的各个交通小区间的出行交通量,也就是现状下的交通小区OD矩阵。
各个交通小区的经济特性和土地利用的发展变化情况。
计算
我们已经知道当前的OD矩阵,以及各个交通小区的一些特性,于是可以使用重力模型、增长系数法计算出未来的OD矩阵。
重力模型 Growth factor methods
T
i
j
=
α
O
i
D
j
c
i
j
β
T_{ij}=\alpha \frac{O_iD_j} {c_{ij}^\beta}
Tij=αcijβOiDj
原理:OD对之间的分布与OD值成正比,与出行费用的平方成反比 。
优点:1) 简单实用
2) 解释了不同用地之间的竞争
3) 考虑了交通网络对出行模式的形响
4) 可以评估社会和经济因素对出行模式的影响 ^2f7a10
缺点:
- 距离变量的范围没有限制或没有定义情况下,公式可能失效
- 交通区的选择会影响参数值
- 迭代困难,需要经过大量调整和处理才能获得理想结果
- 费用函数多样
- 结构参数随时间稳定问题
增长系数法 Synthetic models
q
i
j
m
+
1
=
q
i
j
m
×
f
(
f
o
i
,
f
d
j
)
q_{ij}^{m+1}=q_{ij}^m\times f(fo_i,fd_j)
qijm+1=qijm×f(foi,fdj)
f
o
i
=
O
i
O
i
0
fo_i=\frac{O_i}{O_i^0}
foi=Oi0Oi
f
d
j
=
D
j
D
j
0
fd_j=\frac{D_j}{D_j^0}
fdj=Dj0Dj
f
o
i
m
fo_i^m
foim:i小区第m次计算的发生增长系数
f
d
j
m
fd_j^m
fdjm:j小区第m次计算的吸引增长系数
原理:未来的出行分布量是在现状的(或历史的)出行分布的基础上,乘以相应的增长系数得到的。两小区之间出行分布量的增长系数,与两小区出行发生量与吸引量的增长率有关。
优点:结构简单,易于理解。直接使用观测出行矩阵来预测出行增长,不需要其他额外的数据。
缺点:
- 无法预测未来新增小区的交通量
- 对于出行矩阵的精度要求大,出行矩阵中的误差将在计算中被放大
- 不能考虑与网络费用有关影响出行分布的属性
(26条消息) 四阶段法-交通分布预测方法-算法复现_aaaaluba的博客-CSDN博客_交通分布预测内有简要计算步骤及python代码
平均增长系数
f a v g ( f o i m , f d j m ) = 1 2 ( f o i m + f d j m ) f_{avg}(fo_i^m,fd_j^m)=\frac 1 2(fo_i^m+fd_j^m) favg(foim,fdjm)=21(foim+fdjm)
弗尼斯法
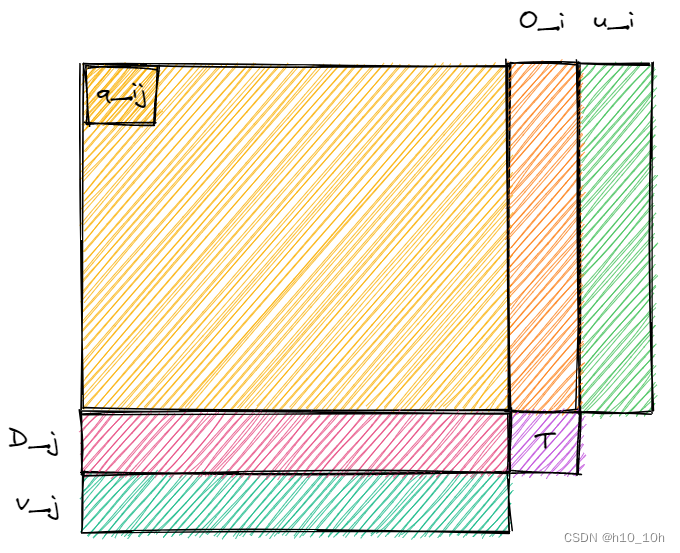
两个分区之间出行分布量
q
i
j
q_{ij}
qij的预测值与此两个分区之间出行分布的现状值
q
i
j
0
q_{ij}^0
qij0成正比,还与产生分区的规划年产生量预测值、吸引分区的规划年吸引量预测值有关,这种关系可用两个系数
u
i
u_i
ui、
v
j
v_j
vj表示(分别称为产生系数、吸引系数),即
q
i
j
=
q
i
j
0
×
u
i
×
v
j
q_{ij}=q_{ij}^0\times u_i \times v_j
qij=qij0×ui×vj这两个系数满足约束条件
∑
i
q
i
j
=
u
i
∑
j
q
i
j
0
⋅
v
j
=
O
i
\sum_i q_{ij}=u_i\sum_jq_{ij}^0\cdot v_j=O_i
i∑qij=uij∑qij0⋅vj=Oi
∑
j
q
i
j
=
v
j
∑
i
q
i
j
0
⋅
u
i
=
D
j
\sum_j q_{ij}=v_j\sum_iq_{ij}^0\cdot u_i=D_j
j∑qij=vji∑qij0⋅ui=Dj
算法步骤:
Step 1:初始化,令
u
i
0
=
1
,
k
=
0
u_i^0=1,k=0
ui0=1,k=0
Step 2:解
u
i
k
∑
j
q
i
j
k
⋅
v
j
=
O
i
u_i^k\sum_jq_{ij}^k\cdot v_j=O_i
uik∑jqijk⋅vj=Oi得
v
j
k
v_j^k
vjk
Step 3:将
v
j
k
v_j^k
vjk带入
v
j
k
∑
i
q
i
j
0
⋅
u
i
k
+
1
=
D
j
v_j^k\sum_iq_{ij}^0\cdot u_i^{k+1}=D_j
vjk∑iqij0⋅uik+1=Dj求解
u
i
k
+
1
u_i^{k+1}
uik+1
Step 4:
k
=
k
+
1
k=k+1
k=k+1,返回Step 2迭代,直到
u
i
k
u_i^k
uik与
u
i
k
+
1
u_i^{k+1}
uik+1、
v
j
k
v_j^k
vjk与
v
j
k
+
1
v_j^{k+1}
vjk+1的相对偏差<3%
底特律法
f
D
e
t
r
o
i
d
(
f
o
i
m
,
f
d
j
m
)
=
f
o
i
m
×
f
d
j
m
×
T
m
X
f_{Detroid}(fo_i^m,fd_j^m)=fo_i^m\times fd_j^m\times \frac {T^m} {X}
fDetroid(foim,fdjm)=foim×fdjm×XTm
T
m
T^m
Tm:第m次迭代OD表中生成交通量
X
X
X:将来OD表中的生成交通量

















 1235
1235

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









