






基于S7-1200 PLC和Wincc组态的定点机械手臂控制系统
带解释的梯形图程序,接线图原理图图纸,io分配,组态画面
ID:7658670105593708
Holly123~
基于S7-1200 PLC和WinCC组态的定点机械手臂控制系统是一项关键的技术创新,它为工业领域带来了许多便利和效率提升。本文将围绕该系统展开详细的技术分析,包括梯形图程序的解释、接线图原理图的制作、IO分配以及组态画面的设计。
首先,我们将深入解释基于S7-1200 PLC和WinCC组态的定点机械手臂控制系统的梯形图程序。梯形图是用于描述PLC程序的一种图形化编程语言,它可以清晰地展示程序的执行顺序和逻辑关系。我们将详细介绍各个步骤的功能和作用,并通过注释和说明来解释每个部分的具体实现。
接下来,我们将讨论接线图原理图的制作。接线图原理图是用于描述电气控制系统的一种图形化表示方法,它可以清晰地展示各个元件之间的连接关系和信号传输路径。我们将详细介绍每个元件的功能和作用,并通过图纸和文字说明来展示每个元件的接线方式和连接规则。
此外,我们还将详细介绍IO分配的过程。IO分配是指将各个IO信号与相应的输入输出模块进行连接和配置的过程。我们将介绍如何通过PLC进行IO分配,并通过图表和文字说明来展示各个IO信号与模块之间的连接关系和配置方法。
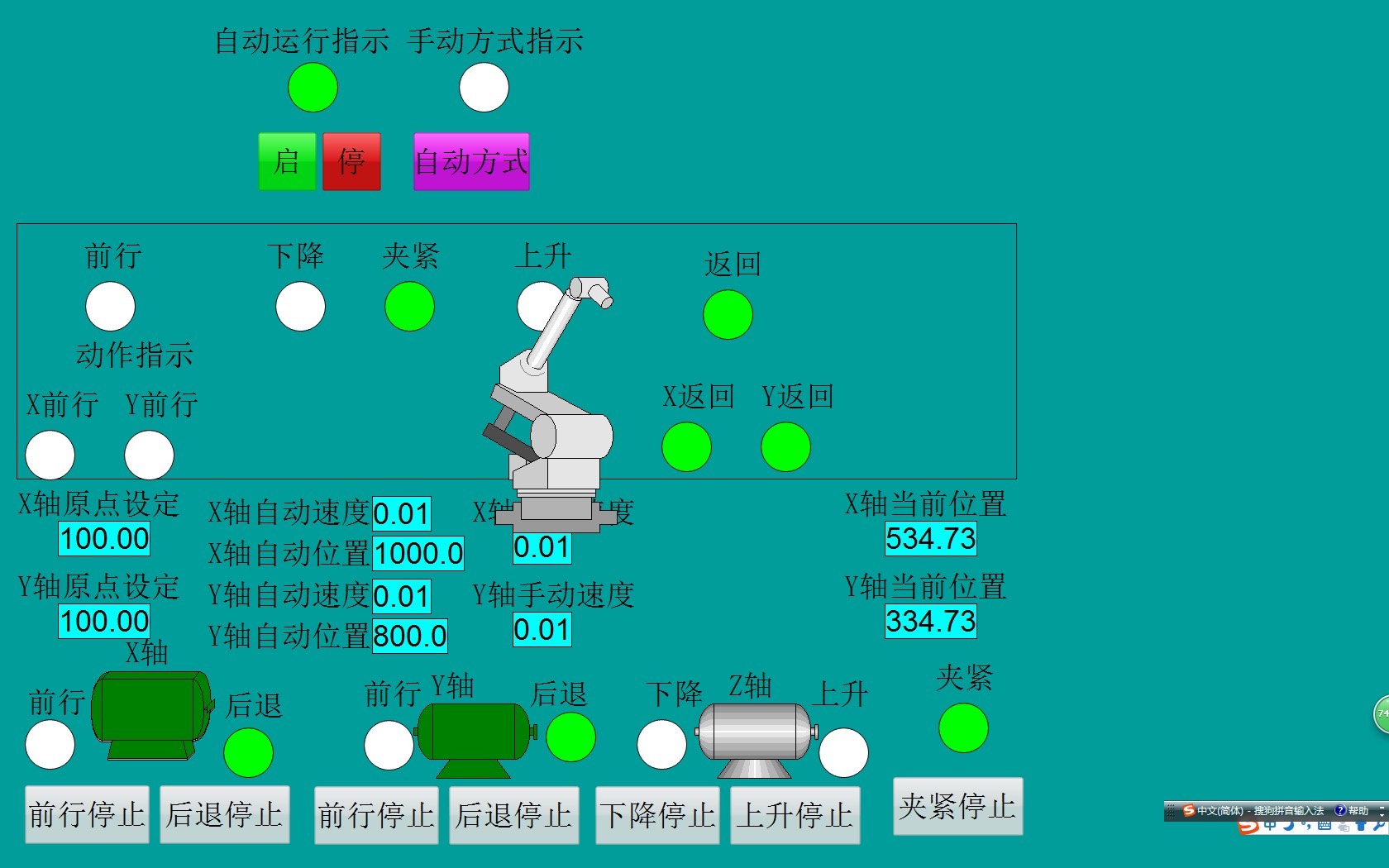
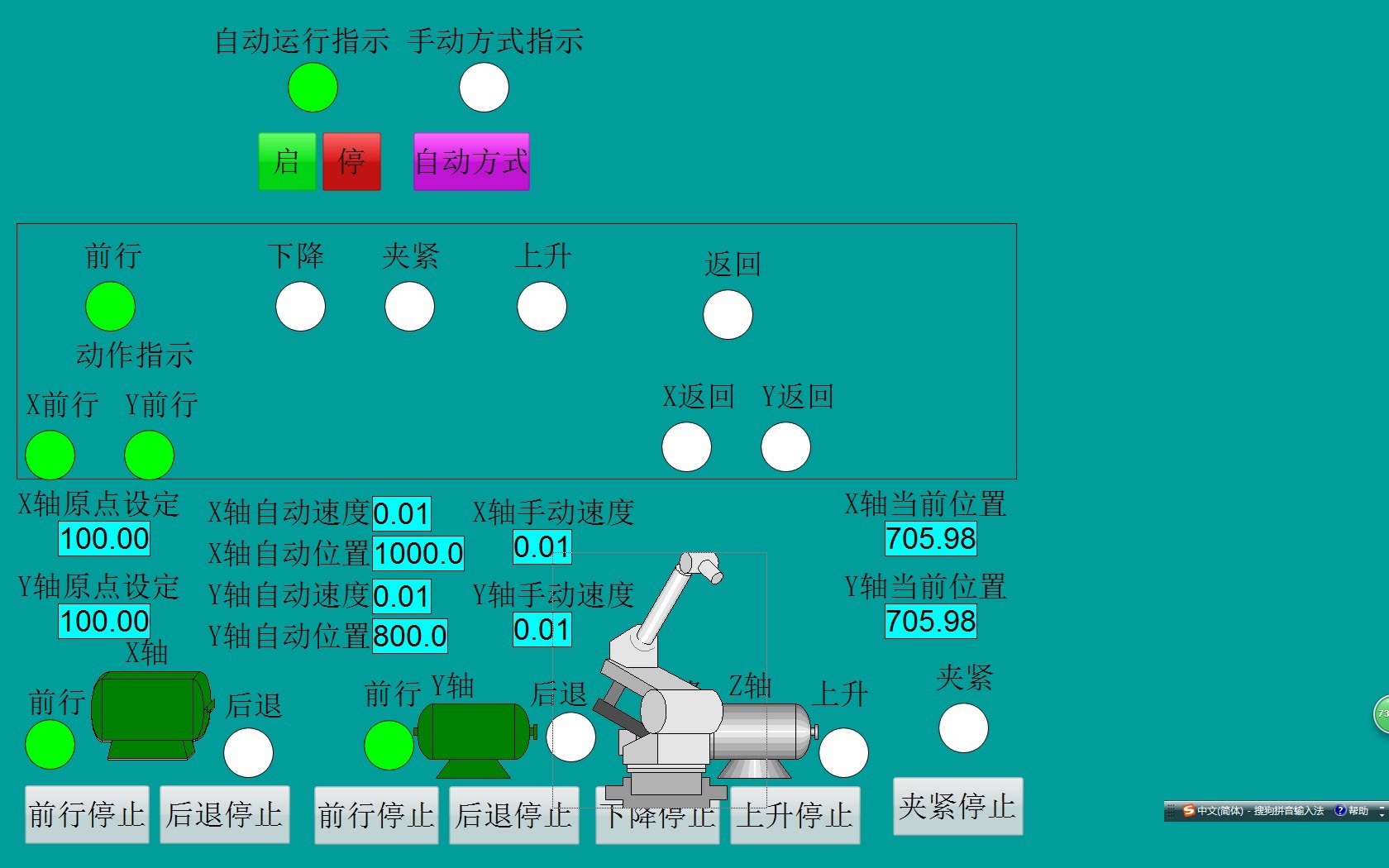
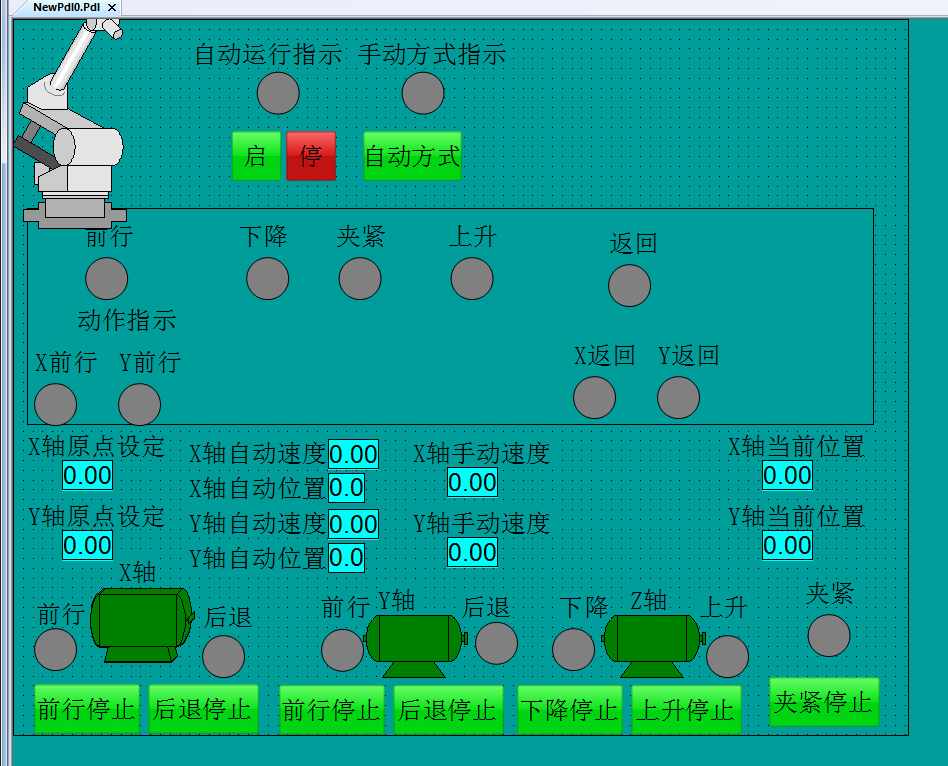
最后,我们将探讨WinCC组态画面的设计。WinCC是一款功能强大的人机界面开发软件,它可以实现对PLC控制系统的监控和操作。我们将详细介绍如何通过WinCC进行组态画面的设计,包括界面布局、操作按钮、状态显示等方面的内容,并通过图文并茂的方式展示设计的效果和实际操作过程。
综上所述,基于S7-1200 PLC和WinCC组态的定点机械手臂控制系统是一项技术上的重要突破,它为工业领域带来了许多便利和效率提升。通过本文的详细分析和解释,读者可以全面了解该系统的工作原理和设计方法,并在实际应用中获得更好的效果。希望本文能为读者带来启发和帮助,促进技术的进步和应用的推广。
相关的代码,程序地址如下:http://wekup.cn/670105593708.html
















 723
723

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









