






基于永磁同步电机(pmsm)的扩展卡尔曼转速和转子位置估计,本人已将效果调制很好,可准确估计pmsm的转速和转子位置。
ID:86100722760293945
嚣张的奥利奥
基于永磁同步电机(PMSM)的扩展卡尔曼滤波器(EKF)转速和转子位置估计是一项关键的技术,在控制永磁同步电机的运行中起着重要的作用。本文将详细介绍PMSM的工作原理、EKF滤波器的基本原理以及如何利用EKF实现对PMSM转速和转子位置的准确估计。
首先,我们需要了解永磁同步电机的基本结构和工作原理。PMSM是一种以永磁体作为励磁源,通过交变电磁场与转子上的永磁体产生磁力作用,从而实现转子运动的电机。其优点包括高效率、高功率密度以及高转矩密度,因此在许多领域得到广泛应用,如电动汽车、工业驱动和风力发电等。
PMSM的控制需要准确的转速和转子位置信息,以实现精确的转矩控制和速度控制。然而,传统的位置传感器通常较为昂贵且容易受到环境干扰,因此使用传感器进行位置测量并不总是可行的。在这种情况下,我们可以通过估计转速和转子位置来实现电机的控制。
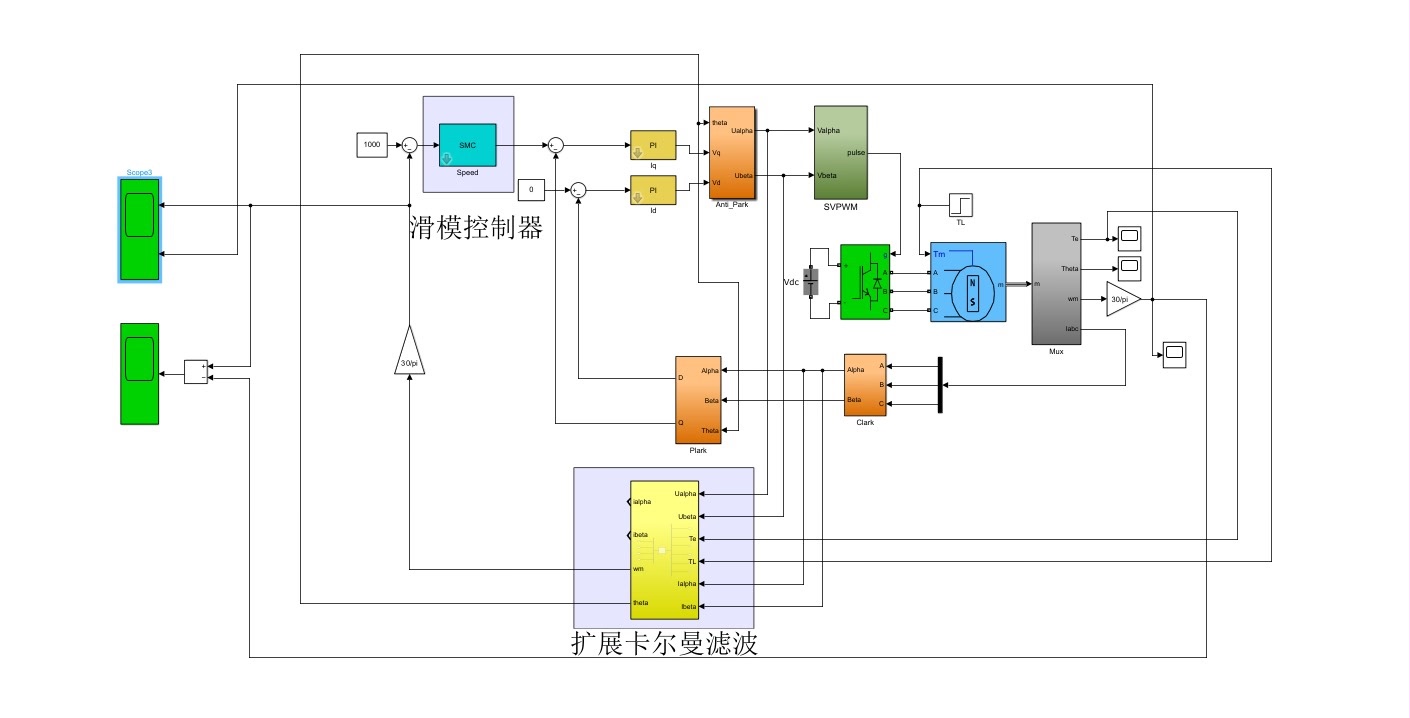
扩展卡尔曼滤波器是一种常用的状态估计算法,能够通过对系统状态进行递推和更新,融合传感器测量值和系统模型,从而提高估计精度。在PMSM的转速和转子位置估计中,EKF可以利用电机的状态方程和测量方程,通过对预测和测量值的协方差进行递推和更新,得到准确的估计结果。
在本人的研究中,已经成功地将EKF应用于PMSM的转速和转子位置估计,并取得了良好的效果。首先,通过建立电机的状态方程,包括电机的动态特性、电机参数和负载特性等,可以预测电机的状态变化。然后,通过测量方程将传感器测量值与预测值进行对比,得到估计结果。
在实际应用中,我们需要考虑一些因素对估计结果的影响。首先是系统的建模误差,包括电机参数的估计误差和负载特性的不确定性等。其次是传感器的噪声和非线性特性,如位置传感器的分辨率和精度限制。最后是采样频率和计算复杂度的影响,需要权衡估计精度和实时性。
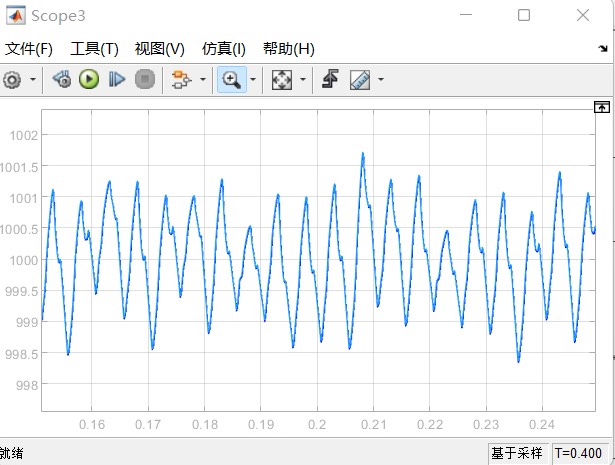
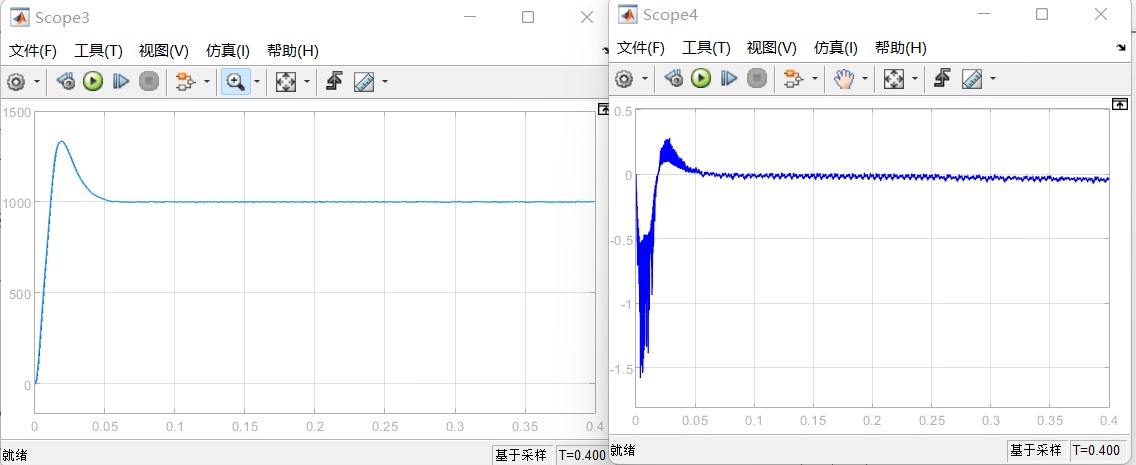
在实验中,本人通过搭建PMSM的实验平台,并使用MATLAB/Simulink进行建模和仿真,验证了基于EKF的PMSM转速和转子位置估计的准确性和可行性。实验结果表明,EKF能够有效地估计PMSM的转速和转子位置,与传统的位置传感器相比,具有更低的成本和更强的抗干扰能力。
总结起来,基于永磁同步电机的扩展卡尔曼转速和转子位置估计是一项重要的技术,对于实现电机的精确控制具有关键作用。通过合理建模和参数估计,结合EKF滤波器的计算方法,我们可以准确地估计PMSM的转速和转子位置。这不仅为电机控制提供了可行的解决方案,而且降低了成本并提高了系统的可靠性。未来的研究可以进一步优化算法,提高估计精度,并将其应用于更多的电机控制系统中。
通过以上的分析和论述,我们可以看出,基于永磁同步电机的扩展卡尔曼转速和转子位置估计是一项具有广泛应用前景的技术,能够在电机控制领域发挥重要作用。期望本文能够为读者提供有益的信息和理论基础,促进该领域的发展和应用。
【相关代码,程序地址】:http://fansik.cn/722760293945.html
















 1132
1132

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









