






Cruise双电机四轮驱动模型和单电机前驱模型,分层建模,具有控制策略模型,三种联合仿真方式都可以运行,以及sp资料。
ID:8439722752418865
车辆仿真
Cruise双电机四轮驱动模型和单电机前驱模型是一种常见的机器人模型,被广泛运用于各种领域的自动化任务中。这两种模型都采用了分层建模的结构,具备了灵活多变的控制策略模型,并且可以通过三种联合仿真方式进行运行。本文将对这两种模型进行深入分析,并探讨它们在实际应用中的优势和不足。
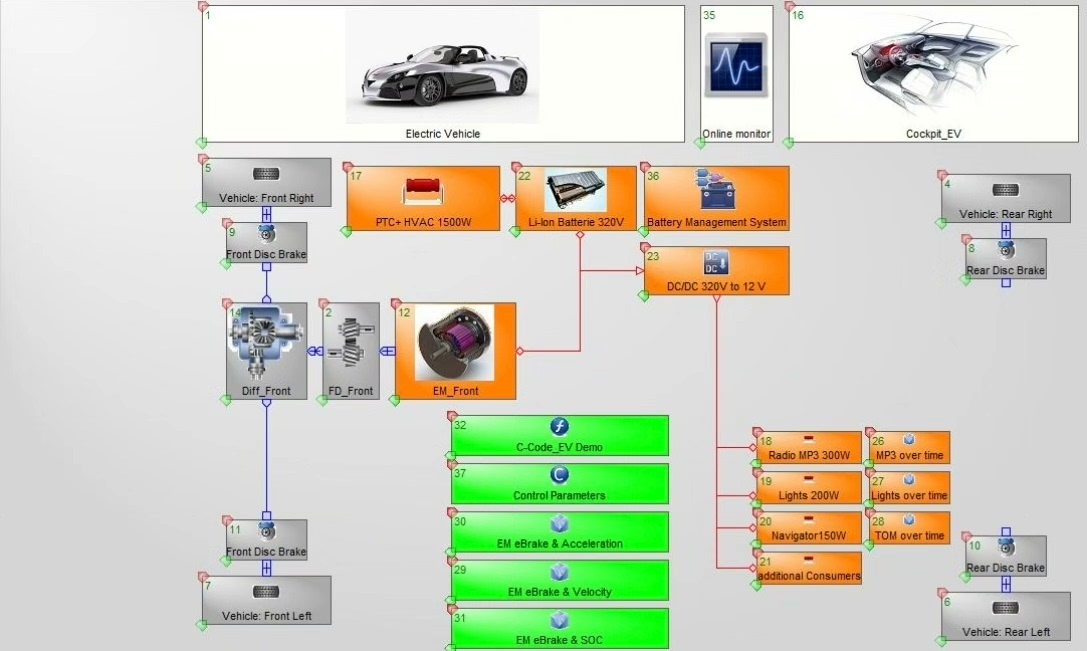
首先,我们来介绍Cruise双电机四轮驱动模型。该模型采用了双电机四轮驱动的结构,通过独立控制四个驱动轮实现机器人的移动。这种结构具有较高的灵活性和稳定性,能够适应各种复杂的地形和环境。在控制策略模型上,Cruise双电机四轮驱动模型可以通过预先设定的轨迹规划和路径跟踪算法实现自主导航和避障功能,具备了较高的自主性和智能性。此外,该模型还可以通过集成传感器和机器视觉系统,实现环境感知和目标识别,进一步提升其实际应用能力。
接下来,我们来讨论单电机前驱模型。与Cruise双电机四轮驱动模型相比,单电机前驱模型采用了更简单的结构,只有一个驱动轮用于机器人的移动。尽管如此,单电机前驱模型依然具备了一定的应用优势。首先,在控制策略模型上,通过合理的控制算法和反馈机制,单电机前驱模型可以实现较为准确的定位和导航功能。此外,由于结构简单,维护成本较低,且结构紧凑,重量轻,适合应用于一些特殊环境和窄小空间中。
在实际应用中,Cruise双电机四轮驱动模型和单电机前驱模型都可以通过三种联合仿真方式进行运行。第一种方式是通过传统的物理仿真软件进行仿真。这种方式可以在计算机上模拟机器人的运动、感知和控制过程,帮助开发人员评估模型的性能和功能。第二种方式是通过虚拟仿真环境进行仿真。在虚拟环境中,可以更加真实地模拟机器人与实际环境的交互,包括地形、障碍物等。第三种方式是通过硬件在环仿真进行仿真,将控制算法加载到实际硬件中,实时调试和测试模型的性能。通过这三种联合仿真方式,开发人员可以全面评估Cruise双电机四轮驱动模型和单电机前驱模型在不同场景下的性能表现,并进行相应优化。
除了以上介绍的模型和仿真方式外,本文还包含了关于Cruise双电机四轮驱动模型和单电机前驱模型的sp资料。这些资料包括模型的技术参数、控制策略的详细介绍、仿真结果的分析和比较等。通过这些资料,读者可以更加全面地了解这两种模型的特点和应用场景,以及它们在实际项目中的可行性和可靠性。
综上所述,Cruise双电机四轮驱动模型和单电机前驱模型是两种常见的机器人模型,具备分层建模的结构和灵活多变的控制策略模型。通过三种联合仿真方式的运行,可以全面评估模型的性能和功能。本文详细介绍了这两种模型的特点和应用优势,并提供了相关的sp资料,帮助读者更好地理解和应用这两种模型。希望本文能为读者在机器人领域的研究和开发工作提供一定的参考和启示。
【相关代码,程序地址】:http://fansik.cn/722752418865.html
















 544
544

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









