






本文章基于野火stm32视频并在其基础上补充
1,姿态检查基本概念
在飞行器中,飞行姿态是非常重要的参数,以飞机自身的中心建立坐标系,当飞机绕坐标轴旋转的时候,会分别影响偏航角、横滚角及俯仰角。
可以参考 什么是欧拉角/姿态角?
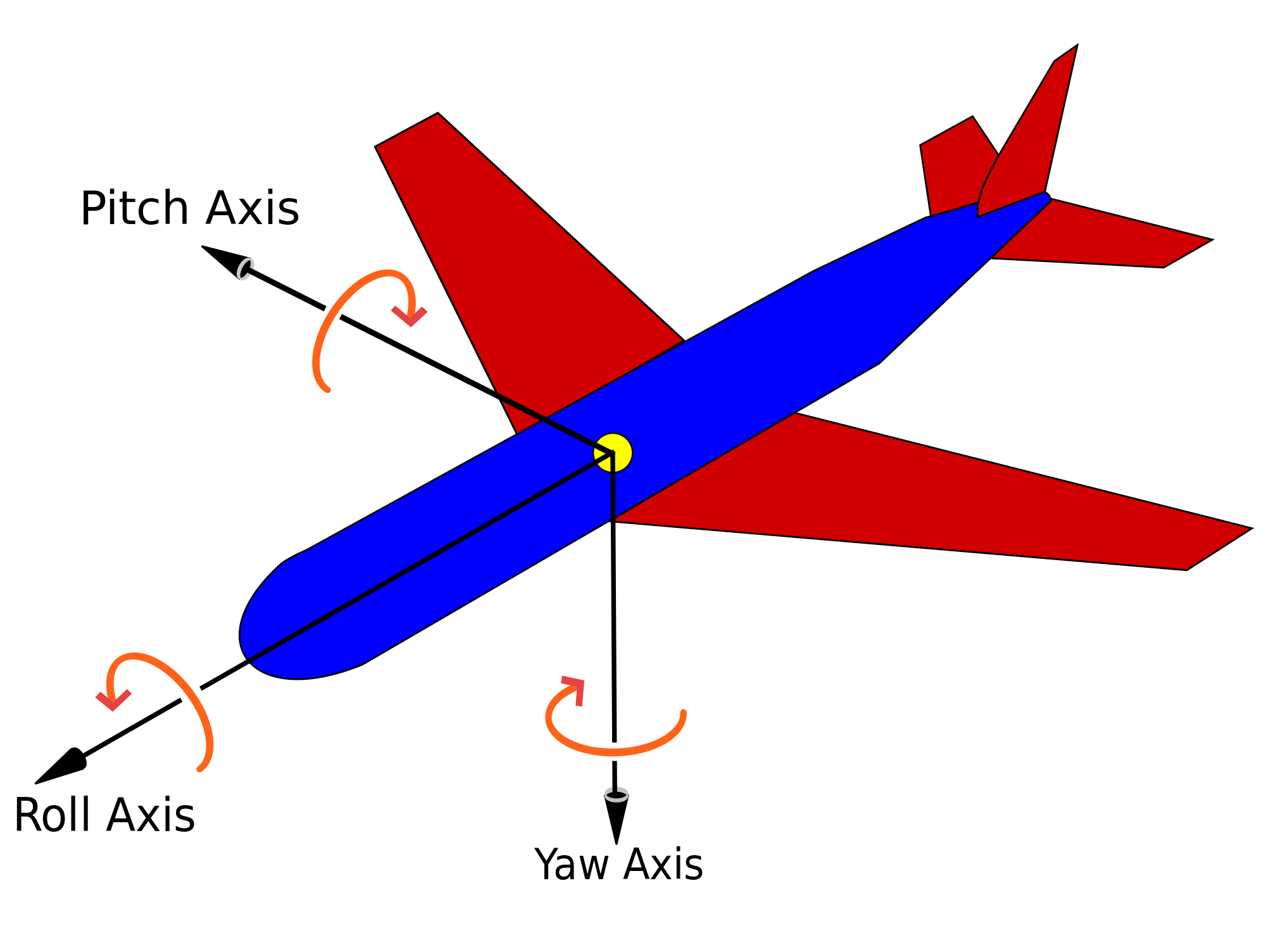
偏航角(Yaw)
描述了物体绕垂直轴(通常是与地球引力方向垂直的轴)的旋转。在飞行器中,偏航角通常与飞行器的指向北的方向有关。对于飞机,偏航角通常由航向角表示。
横滚角/滚转角(Roll)
描述了物体绕其前进方向的轴的旋转。在飞行器中,横滚角表示飞机绕纵轴的旋转。当横滚角为正时,物体向右倾斜;为负时,物体向左倾斜。
俯仰角(Pitch)
俯仰角描述了物体绕其侧向轴的旋转。在飞行器中,俯仰角表示飞机绕横轴的旋转。当俯仰角为正时,物体头部向下倾斜;为负时,物体头部向上倾斜。
假如我们知道飞机初始时是左上角的状态,只要想办法测量出基于原始状态的三个姿态角的变化量,再进行叠加,就可以获知它的实时姿态了。
2,坐标系
地理坐标系
这是一种更常见的坐标系,用于描述地球表面上的位置。它使用经度和纬度来表示位置。
地球坐标系的坐标通常用X、Y、Z表示,其中X轴指向本初子午线与赤道相交点即原点,Z轴指向北极,Y轴则垂直于前两者构成右手坐标系。
地理坐标系可以通过局部坐标系,例如东北天坐标系(ENU),来进行表示。东北天坐标系是一种局部坐标系,以某个固定的点为原点,X轴指向东方、Y轴指向北方、Z轴指向天空(向上)。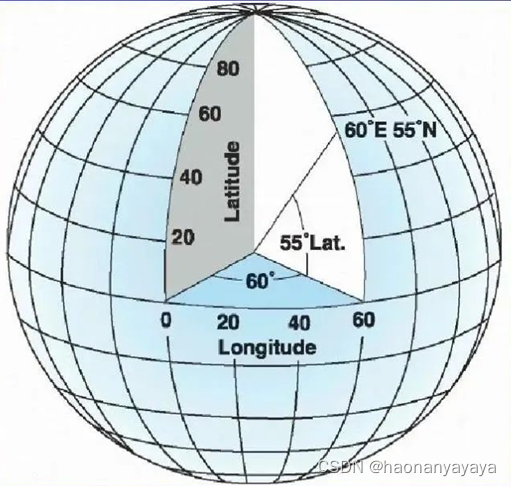
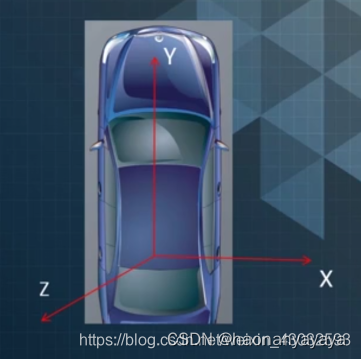
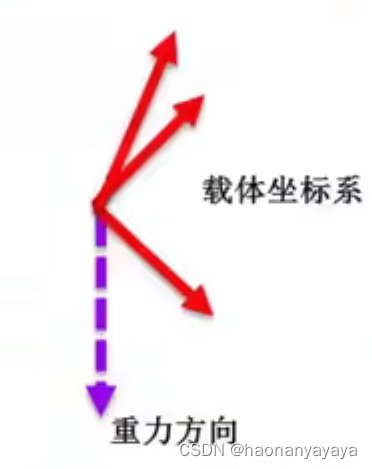
载体坐标系
载体坐标系以运载体的质心为原点,一般根据运载体自身结构方向构成坐标系,如Z轴上由原点指向载体顶部,Y轴指向载体头部,X轴沿载体两侧方向。上面说基于飞机建立的坐标系就是一种载体坐标系,可类比到汽车、舰船、人体、动物或手机等各种物体。
3,姿态的确定
假设初始状态中,飞机的Z轴、X轴及Y轴分别与天轴、北轴、东轴平行。
当飞机绕自身的“Z”轴旋转,它会使自身的“Y”轴方向与局部坐标系的“南北”方向偏离一定角度,该角度就称为偏航角。
当载体绕自身的“X”轴旋转,它会使自身的“Z”轴方向与局部坐标系的“天地”方向偏离一定角度,该角度称为俯仰角。
当载体绕自身的“Y”轴旋转,它会使自身的“X”轴方向与局部坐标系的“东西”方向偏离一定角度,该角度称为横滚角。
使用以上三个角度就可以确定飞机的姿态。
4,陀螺仪
陀螺仪是最直观的角度检测器,它可以检测物体绕坐标轴转动的“角速度”
原理
如同将速度对时间积分可以求出路程一样,将角速度对时间积分就可以计算出旋转的“角度”。
缺陷
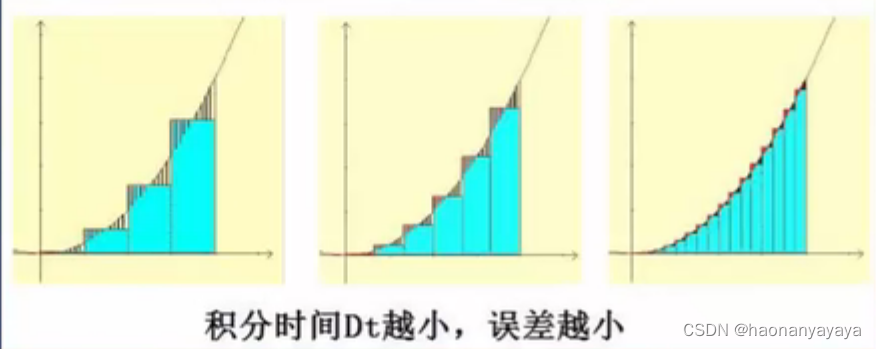
1:积分导致的误差
由于陀螺仪测量角度时使用积分,会存在积分误差,若积分时间Dt越小,误差就越小。这十分容易理解,例如计算路程时,假设行车时间为1小时,我们随机选择行车过程某个时刻的速度Ⅴt乘以1小时,求出的路程误差是极大的,因为行车的过程中并不是每个时刻都等于该时刻速度的,如果我们每5分钟检测一次车速可得到Vt1、V2、V3-12这12个时刻的车速,对各个时刻的速度乘以时间间隔5分钟),并对这12个结果求和,就可得出一个相对精确的行车路程了
解决:不断提高采样频率,就可以使积分时间D变小,降低误差。
2:器件本身带来的误差
更难以解决的是器件本身误差带来的问题。例如,某种陀螺仪的误差是0.1度/秒,当陀螺仪静止不动时,理想的角速度应为0,无论它静止多久,对它进行积分测量得的旋转角度都是0,这是理想的状态;而由于存在0.1度/秒的误差,当陀螺仪静止不动时,它采样得的角速度一直为0.1度/秒,若静止了1分钟,对它进行积分测量得的旋转角度为6度,若静止了1小时,陀螺仪进行积分测量得的旋转角度就是360度,即转过了一整圈,这就变得无法忍受了。
解决:只有当正方向误差和负方向误差能正好互相抵消的时候,才能消除这种累计误差
5,利用加速度计检测角度
1,加速度传感器介绍
由于直接用陀螺仪测量角度在长时间测量时会产生累计误差,因而又引入了检测倾角的传感器。

注:T字型水平仪 只是简单的例子,不是内部结构
假如把这个放在设备上,只需要看水泡就能知道横滚角和俯仰角的偏移方向
在电子设备中,一般使用加速度传感器来检测倾角,它通过检测器件在各个方向的形变情况而采样得到受力数据,根据F=ma转换,传感器直接输出加速度数据,因而被称为加速度传感器。
当传感器的姿态不同时,它在自身各个坐标轴检测到的重力加速度是不样的,利用各方向的测量结果,根据力的分解原理,可求出各个坐标轴与重力之间的夹角。
因为重力方向是与“天地”轴固连的,所以通过测量载体坐标系各轴与重力方向的夹角即可求得它的角度旋转,从而获知载体姿态。
2,加速度传感器缺陷
缺陷1:无法检测偏航角
由于这种倾角检测方式是利用重力进行检测的,它无法检测到偏航角(Yaw),原理跟T字型水平仪一样,无论如何设计水平仪,水泡都无法指示这样的角度。
缺陷2:不会区分重力加速度与外力加速度
缺陷是加速度传感器并不会区分重力加速度与外力加速度,当物体运动的时候,它也会在运动的方向检测出加速度,特别在震动的状态下,传感器的数据会有非常大的数据变化,此时难以反应重力的实际值。
6,磁场检测
磁场检测为了弥补加速度传感器无法检测偏航角的问题,我们再引入磁场检测传感器,它可以检测出各个方向上的磁场大小,通过检测地球磁场,它可实现指南针的功能,所以也被称为电子罗盘。由于地磁场与地理坐标系的“南北”轴固联,利用磁场检测传感器的指南针功能,就可以测量出偏航角了。
缺陷:会受到外部磁场干扰,如载体本身的电磁干扰和不同地理环境的磁铁矿干扰等
7,GPS检测
使用GPS可以直接检测出载体在地球上的坐标
假如载体在某时刻测得坐标为A,另一时刻测得坐标为B,利用两个坐标即可求出它的航向,即可以确定偏航角,且不受磁场的影响
缺陷:检测方式只有当载体产生大范围位移的时候才有效
8,姿态融合
可以发现,使用陀螺仪检测角度时,在静止状态下存在缺陷,且受时间影响,而加速度传感器检测角度时,在运动状态下存在缺陷,且不受时间影响,刚好互补。
假如我们同时使用这两种传感器,并设计一个滤波算法,当物体处于静止状态时,增大加速度数据的权重,当物体处于运动状时,增大陀螺仪数据的权重,从而获得更准确的姿态数据。
同理,检测偏航角,当载体在静止状态时,可增大磁场检测器数据的权重,当载体在运动状态时,增大陀螺仪和GPS检测数据的杈重。这些采用多种传感器数据来检测姿态的处理算法被称为姿态融合。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









