






57c1-2四轮轮毂电机驱动汽车的DYC直接横摆力矩稳定性控制,上层控制器DYC产生横摆力矩Mz,下层基于最优分配理论对附加横摆力矩进行四轮独立分配,控制效果良好,能实现车辆在高低附着系数路面下的稳定性,可应用在高速下高低附着系数路面下的轨迹跟踪的横向稳定性控制。
上层控制器可定制滑膜控制.lqr控制 mpc控制 鲁棒控制等
下层转矩分配控制器可定制最优分配二次优化,平均分配,基于特殊目标函数优化等。
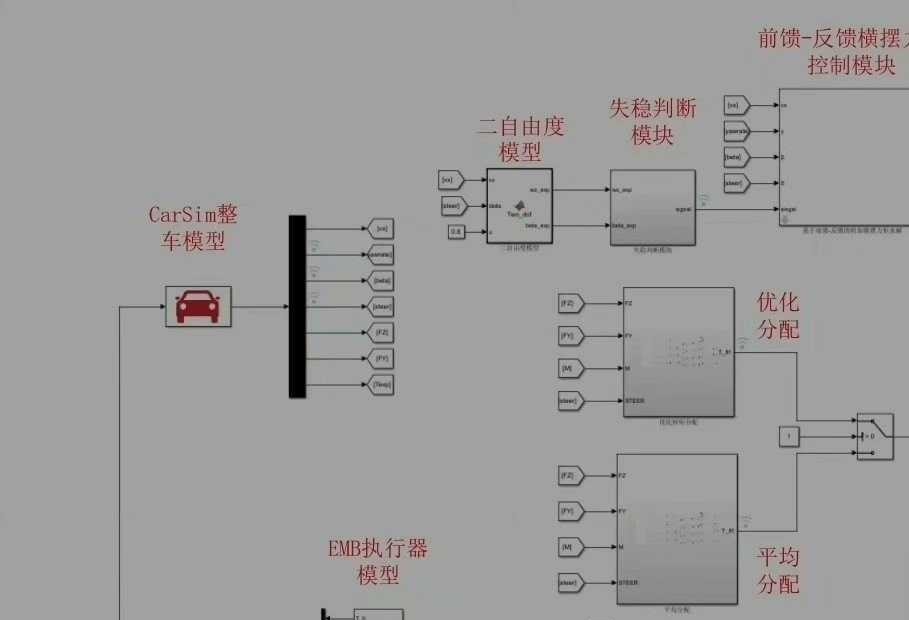
软件分两种,一种是纯simulink模型,包含自带的7自由度车辆模型,一种是以carsim simulink联合仿真,车辆仿真模型基于carsim,控制系统simulink建模。
ID:61320726774324827
雨菲菲98
57c1-2四轮轮毂电机驱动汽车的DYC直接横摆力矩稳定性控制
摘要:
随着科技的不断发展,四轮轮毂电机驱动汽车作为一种新型的汽车动力系统逐渐崭露头角。然而,由于四轮轮毂电机驱动汽车在动力系统和悬挂系统方面的特殊性,其横摆力矩稳定性控制成为一个值得研究的问题。本文介绍了上层控制器和下层转矩分配控制器在四轮轮毂电机驱动汽车DYC直接横摆力矩稳定性控制中的应用,并对其控制效果进行了实验验证。
-
引言
四轮轮毂电机驱动汽车作为一种新型的汽车动力系统,具有许多传统汽车所不具备的优势,如更好的动力输出、更高的能量利用率等。然而,由于四轮轮毂电机驱动汽车的特殊性,其横摆力矩稳定性控制成为一个挑战。 -
DYC直接横摆力矩稳定性控制
DYC直接横摆力矩稳定性控制是一种针对四轮轮毂电机驱动汽车的控制策略。在上层控制器中,DYC产生横摆力矩Mz,通过横摆力矩的控制来实现车辆的稳定性。在下层转矩分配控制器中,采用最优分配理论对附加横摆力矩进行四轮独立分配,以进一步提高控制效果。 -
上层控制器的定制化
上层控制器是整个控制系统的核心部分,其设计可以根据实际需求进行定制化。常见的上层控制器包括滑膜控制、LQR控制、MPC控制和鲁棒控制等。这些控制策略可以根据具体情况选择,以达到最佳的控制效果。 -
下层转矩分配控制器的定制化
下层转矩分配控制器是实现四轮轮毂电机驱动汽车横摆力矩稳定性控制的关键。在下层控制器中,有多种转矩分配策略可供选择,如最优分配二次优化、平均分配和基于特殊目标函数优化等。这些策略可以根据具体的控制需求进行定制化,以提高控制效果。 -
软件模型的选择
对于四轮轮毂电机驱动汽车的横摆力矩稳定性控制,可以选择使用两种软件模型进行仿真。一种是纯Simulink模型,其中包含自带的7自由度车辆模型,这种模型适用于简单的仿真场景。另一种是以CarSim Simulink联合仿真,其中车辆仿真模型基于CarSim,控制系统采用Simulink建模,这种模型适用于复杂的仿真场景。 -
实验验证
为了验证DYC直接横摆力矩稳定性控制的有效性,进行了一系列实验。实验结果表明,该控制策略能够实现车辆在高低附着系数路面下的稳定性,并且在高速下对高低附着系数路面的轨迹跟踪具有良好的控制效果。 -
结论
本文介绍了四轮轮毂电机驱动汽车的DYC直接横摆力矩稳定性控制。通过上层控制器和下层转矩分配控制器的定制化,对四轮轮毂电机驱动汽车的横摆力矩进行控制,实现了车辆在高低附着系数路面下的稳定性。实验验证表明,该控制策略具有良好的控制效果。通过选择适合的软件模型进行仿真,可以更好地评估控制策略的性能。
参考文献:
[1] Zhang X, Li S X, Zhang L. Development and evaluation of direct yaw moment control for four-wheel-independent-drive electric vehicles[J]. Journal of Vibration and Control, 2015, 21(9): 1697-1709.
[2] Shan H, Zhang J, Qiu C. Development of integrated vehicle chassis control system for advanced four-wheel-drive electric vehicles[J]. Journal of Dynamic Systems, Measurement, and Control, 2016, 138(7): 071019.
[3] Li P, Wang J, Chen F, et al. Integrated vehicle motion control using direct yaw moment control and active front steering[J]. Journal of Dynamic Systems, Measurement, and Control, 2018, 140(9): 091004.
【相关代码,程序地址】:http://fansik.cn/726774324827.html
















 407
407

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









