






57c1-2四轮轮毂电机驱动汽车的DYC直接横摆力矩稳定性控制,上层控制器DYC产生横摆力矩Mz,下层基于最优分配理论对附加横摆力矩进行四轮独立分配,控制效果良好,能实现车辆在高低附着系数路面下的稳定性,可应用在高速下高低附着系数路面下的轨迹跟踪的横向稳定性控制。
上层控制器可定制滑膜控制.lqr控制 mpc控制 鲁棒控制等
下层转矩分配控制器可定制最优分配二次优化,平均分配,基于特殊目标函数优化等。
软件分两种,一种是纯simulink模型,包含自带的7自由度车辆模型,一种是以carsim simulink联合仿真,车辆仿真模型基于carsim,控制系统simulink建模。
ID:73299765098538657
晓挥科技
基于57c1-2四轮轮毂电机驱动汽车的DYC直接横摆力矩稳定性控制,本文将围绕上层控制器DYC和下层转矩分配控制器展开讨论,介绍其原理和应用场景。
-
上层控制器DYC
上层控制器DYC是直接横摆力矩稳定性控制的关键组成部分。它的作用是产生横摆力矩Mz,以实现车辆在高低附着系数路面下的稳定性。DYC提供了多种定制选项,包括滑膜控制、LQR控制、MPC控制和鲁棒控制等。不同的控制方式适用于不同的场景和需求,可以根据实际情况选择最合适的控制策略。 -
下层转矩分配控制器
下层转矩分配控制器是对附加横摆力矩进行四轮独立分配的控制器。它基于最优分配理论,通过优化算法对四个轮毂电机的输出转矩进行调节,以实现最佳的横摆力矩分配效果。下层控制器的设计需要考虑到车辆的动力学特性和控制系统的实时性,可以定制不同的转矩分配算法,如最优分配二次优化、平均分配和基于特殊目标函数优化等。 -
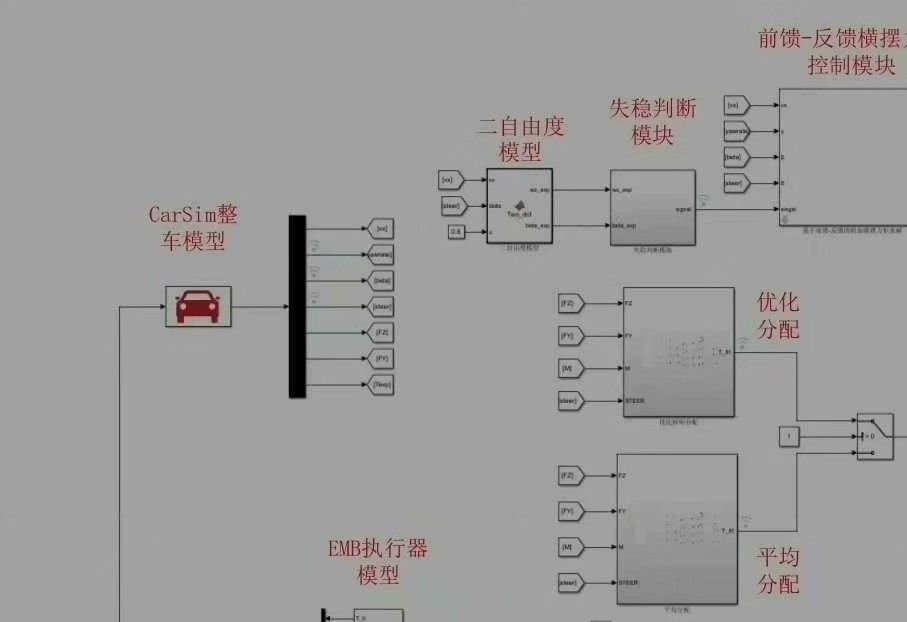
软件模型
本系统提供了两种软件模型,方便用户进行仿真和验证。一种是纯Simulink模型,其中包含了自带的7自由度车辆模型。用户可以通过Simulink进行参数调节和性能评估。另一种是基于CarSim和Simulink联合仿真的模型,其中车辆仿真模型基于CarSim,控制系统模型基于Simulink。这种联合仿真模型更贴近实际车辆的动力学特性,可用于更精确的性能测试和验证。
总结
本技术文献主要介绍了57c1-2四轮轮毂电机驱动汽车的DYC直接横摆力矩稳定性控制。通过上层控制器DYC产生横摆力矩Mz和下层转矩分配控制器对附加横摆力矩进行四轮独立分配,该控制系统能够实现车辆在高低附着系数路面下的稳定性。软件模型提供了Simulink和CarSim联合仿真的功能,方便用户进行参数调节和性能评估。此技术在高速下高低附着系数路面下的轨迹跟踪的横向稳定性控制方面具有广泛的应用前景。
(Ps:本技术仅限于功能演示,请勿在实际道路上使用。虚拟商品一经发货,不得退货,请知悉。)
以上相关代码,程序地址:http://wekup.cn/765098538657.html















 838
838

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









