








文章目录
1.基本原理
1.1数学分析
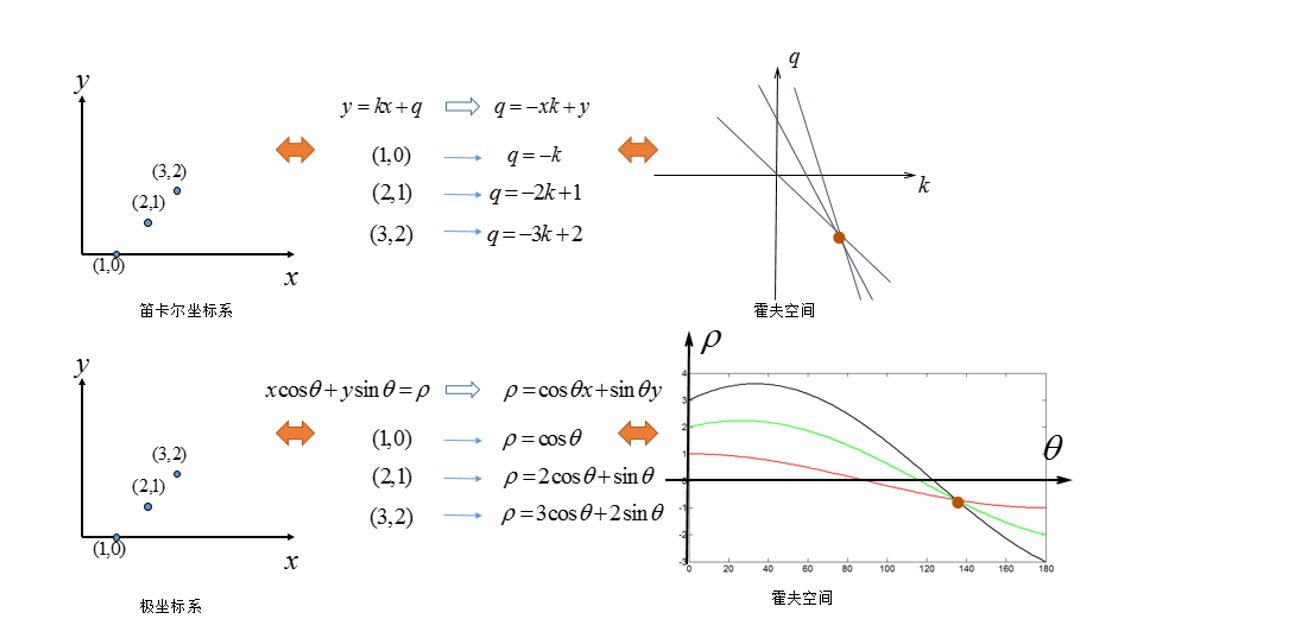
- 如下图,y=kx+q

我们可以把k看作自变量,把q看作因变量,则有:
A
:
q
=
−
k
x
1
+
y
1
B
:
q
=
−
k
x
2
+
y
2
A: q=-kx_1+y_1\\ B: q=-kx_2+y_2
A:q=−kx1+y1B:q=−kx2+y2
这个过程,称作霍夫变换,在霍夫空间上,可得到一个点,如下图所示:

由此可见:坐标系的直线,经霍夫变换后,变成了霍夫空间上的点,如下图:

- 若有A(x1,y1) 、B(x2,y2),且x1!=x2,y1!=y2
当
q
A
=
q
B
,
k
A
=
m
×
K
B
−
x
1
⋅
k
+
y
1
=
−
x
2
⋅
k
+
y
2
当q_A=q_B,k_A=m\times K_B\\ -x_1\cdot k + y1 = -x_2\cdot k + y_2\\
当qA=qB,kA=m×KB−x1⋅k+y1=−x2⋅k+y2
有交点Q,在交点Q处,x1=x2,y1=y2
此时,可以说明A/B在同一条直线上
k变换,q也就随之变换。这个过程表示经过D点的直线,360°旋转,如下图:
- 多点共线的情况,如下图:

虽然图二中有多个交点,但我们主要关注的是三线相交的情况,这也是霍夫变换的后处理的基本方式:选择由尽可能多直线汇成的点
- 但是仅用k、q表示霍夫空间是有问题的,因为我们忽视了一种特殊情况:直线与x轴垂直的情况

k=∞是不方便表示的,所以我们必须改变一下坐标系:用极坐标表示点,线
x
1
=
ρ
=
c
o
s
θ
y
1
=
ρ
s
i
n
θ
ρ
=
x
c
o
s
θ
+
y
s
i
n
θ
所
以
,
可
用
[
ρ
,
θ
]
表
示
一
个
点
x_1=\rho =cos\theta\\ y_1=\rho sin\theta\\ \rho =xcos\theta+ysin\theta\\ 所以,可用[\rho,\theta]表示一个点
x1=ρ=cosθy1=ρsinθρ=xcosθ+ysinθ所以,可用[ρ,θ]表示一个点
霍夫空间也随之改变,但也就是点的曲线变了而已
1.2图像处理应用
那么我们应如何把它用在图像处理中呢?
-
假设我们图像中有一段有8个像素点组成直线
- 1.建立直角坐标系
- 2.将第一个像素点的(x,y)代入公式中
ρ = x c o s θ + y s i n θ \rho =xcos\theta+ysin\theta\\ ρ=xcosθ+ysinθ
- 3.此时角度作为自变量,我们选用遍历查询的办法,不断旋转增加角度(记住,角度增加量极小,但下图为了方便计算,我每次旋转都增加了45°)
- 4.在(1,8)处有5个ρ值,我们将结果记录下来
- 5.然后计算(3,6)坐标处,依此类推,也将结果记录下来
- 6.每个像素点的旋转的数据都记录下来之后,找哪一个ρ值出现的最多(下图是 (9√2)/2)
- 7.再次带(9√2)/2到公式(4)中,得到角度
- 8.计算出**[ρ,θ]**,即可表示出一条线了

以上就是标准霍夫变换的原理
但我们一般不用标准霍夫变换,而是用概率霍夫变换😂😂😂
参考资料:霍夫变换直线检测(Line Detection)原理及示例
2.概率霍夫变换
2.1标准霍夫与概率霍夫
-
标准霍夫变换:把图像映射到它的参数空间上,它需要计算所有的M个边缘点,这样它的运算量和所需内存空间都会很大。
-
概率霍夫变换:如果在输入图像中只是处理m(m<M)个边缘点,则这m个边缘点的选取是具有一定概率性的,因此该方法被称为概率霍夫变换。该方法还有一个重要的特点就是能够检测出线端,即能够检测出图像中直线的两个端点,确切地定位图像中的直线。概率霍夫变换的优点:只分析图像点的一部分(标准的是分析全部),并估计这些点属于同一条线的概率,计算强度小,运行速度快
2.2概率霍夫检测步骤
- 随机抽取图像中的一个特征点,即边缘点,如果该点已经被标定为是某一条直线上的点,则继续在剩下的边缘点中随机抽取一个边缘点,直到所有边缘点都抽取完了为止;
- 对该点进行霍夫变换,并进行累加和计算;
- 选取在霍夫空间内值最大的点,如果该点大于阈值的,则进行步骤4,否则回到步骤1;
- 根据霍夫变换得到的最大值,从该点出发,沿着直线的方向位移,从而找到直线的两个端点;
- 计算直线的长度,如果大于某个阈值,则被认为是好的直线输出,回到步骤1。
3.霍夫变换检测线
3.1cv2.HoughLinesP()函数
HoughLinesP函数就是利用概率霍夫变换来检测直线的
cv2.HoughLinesP()函数功能:概率霍夫变换检测直线
输入参数:
- image:图像名,强烈建议输入经Canny检测之后的图像
- rho:搜索线时的位置距离间隔(以像素为单位)
- theta:搜索线时的旋转角度差(以度为单位)
- threshold:表示丢弃长度低于该阈值的线,显然这个值越大,所判断出的直线越少;这个值越小,所判断出的直线越多
- minLineLength:设置最小线段长度,一次性丢弃较短的线
- maxLineGap:最大直线间隙,即如果有两条线段在一条直线上,但它们之间因为有间隙,所以被认为是两个线段,如果这个间隙大于该值,则被认为是两条线段,否则是一条
返回值:lines为输出的直线向量,每条线用4个元素表示,即直线的两个端点的4个坐标值(x1, y1, x2, y2)表示,其中(x1, y1)表示线段的起点,(x2, y2)表示线段的终点
示例:lines = cv2.HoughLinesP(edges,1,np.pi/180,30,minLineLength,maxLineGap)
3.2线检测程序
import cv2 as cv
import numpy as np
img = cv.imread('test2.jpg')
gray = cv.cvtColor(img,cv.COLOR_BGR2GRAY)
edges = cv.Canny(gray,50,150,apertureSize = 3)
lines = cv.HoughLinesP(edges,1,np.pi/180,100,minLineLength=100,maxLineGap=10)
for line in lines:
x1,y1,x2,y2 = line[0]
cv.line(img,(x1,y1),(x2,y2),(0,255,0),2)
cv.imshow('houghlines5.jpg',img)
cv.waitKey()
cv.destroyAllWindows()

注意!!!:
市面上有些教材书上是这么写的,无法得到理论结果💔

正确的答案为:
for line in lines:
x1,y1,x2,y2 = line[0]
cv.line(img,(x1,y1),(x2,y2),(0,255,0),2)
4.霍夫变换检测圆
Opencv中还有一个函数cv2.HoughCircles,它通过霍夫梯度法,实现了圆的检测
参考资料:opencv —— HoughCircles 霍夫圆变换原理及圆检测
4.1cv2.HoughCircles()函数
cv2.HoughCircles()函数功能:霍夫变换检测圆
输入参数:
img: 待检测的灰度图
cv2.HOUGH_GRADIENT:检测的方法,霍夫梯度,也是唯一的检测方法
1:检测的圆与原始图像具有相同的大小,dp=2,检测的圆是原始图像的一半
20:检测到的相邻圆的中心的最小距离(如果参数太小,除了一个真实的圆外,还可能会错误地检测到多个相邻圆。如果太大,可能会漏掉一些圆。)
param1:Canny 边缘检测的高阈值,低阈值被自动置为高阈值的一半,默认为 100
(霍夫梯度法里面已存在Canny检测,故我们无需重复)
param2:被计算机判定为圆的难度。它越小,就越可能检测到假圆;
而它越大的话,能通过检测的圆就更加接近完美的圆形了
minRadius:最小圆半径
maxRadius:最大圆半径,如果<=0,则使用最大图像尺寸。如果<0,则返回没有找到半径的中心。
返回值:cv2.HoughCircles的返回将其reshape为(-1, 3),每一行就是一圆的参数,分别是
(圆心横坐标,圆心纵坐标,半径),最后用于该处:cv2.circle(coins_img, (i[0], i[1]), i[2], (0, 0, 255), 5) # 画圆
示例:circle=cv2.HoughCircles(gray_img,cv2.HOUGH_GRADIENT,1,120,param1=100,param2=30,minRadius=0,maxRadius=0)
4.2圆检测程序
import cv2
import numpy as np
planets = cv2.imread('planet_glow.jpg')
gray_img = cv2.cvtColor(planets,cv2.COLOR_BGR2GRAY)
gray_img = cv2.medianBlur(gray_img,5)
circles = cv2.HoughCircles(gray_img,cv2.HOUGH_GRADIENT,1,120,param1=80,param2=35,minRadius=0,maxRadius=0)
print(circles)
circles = np.uint16(np.around(circles))
for i in circles[0,:]:
cv2.circle(planets,(i[0],i[1]),i[2],(0,255,0),2)
cv2.circle(planets,(i[0],i[1]),2,(0,0,255),3)
cv2.imshow('planet',planets)
cv2.waitKey()
cv2.destroyAllWindows()
效果显著!😎😎😎

5.结语
Opencv入门篇已经学完了,接下来有其它的事情❌,这个专栏预计停更一两周📵
车牌检测,周三看看能不能做完😭😭😭
忙完之后,估计就到了用Haar级联实现人脸检测🐵

















 2009
2009











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











