






转载https://blog.csdn.net/yangtrees/article/details/8075911
https://blog.csdn.net/GDFSG/article/details/50904811
我们把这5个式子可分成三大部分看:
公式和opencv对应关系的讲解:
首先对于离散控制过程的系统,其系统状态和系统测量值可进行以下表示:
X(k): k时刻系统状态
A: 状态转移矩阵,对应opencv里kalman滤波器的transitionMatrix矩阵
B: 控制输入矩阵,对应opencv里kalman滤波器的controlMatrix矩阵
U(k): k时刻对系统的控制量
Z(k): k时刻的测量值
H: 系统测量矩阵,对应opencv里kalman滤波器的measurementMatrix矩阵
W(k):系统过程噪声,为高斯白噪声,协方差为Q,对应opencv里的kalman滤波器的processNoiseCov矩阵
V(k): 测量噪声,也为高斯白噪声,协方差为R,对应opencv里的kalman滤波器的measurementNoiseCov矩阵
对于满足上面的条件(线性随机微分系统,过程和测量都是高斯白噪声),卡尔曼滤波器是最优的信息处理器。
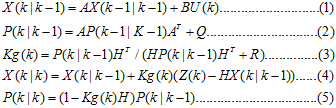
以上便是核心的5个公式。
第一部分:
式(1)-(2): 预测值的计算
式(1): 计算基于k-1时刻状态对k时刻系统状态的预测值
X(k|k-1): 基于k-1时刻状态对k时刻状态的预测值,对应opencv里kalman滤波器的predict()输出,即statePre矩阵
X(k-1|k-1):k-1时刻状态的最优结果,对应opencv里kalman滤波器的上一次状态的statePost矩阵
U(k): k时刻的系统控制量,无则为0
A: 状态转移矩阵,对应opencv里kalman滤波器的transitionMatrix矩阵
B: 控制输入矩阵,对应opencv里kalman滤波器的controlMatrix矩阵
/**********************************************************************************************************************************/
式(2): 计算X(k|k-1)对应的协方差的预测值
P(k|k-1): 基于k-1时刻的协方差计算k时刻协方差的预测值,对应opencv里kalman滤波器的errorCovPre矩阵 (predict预测)
P(k-1|k-1):k-1时刻协方差的最优结果,对应opencv里kalman滤波器的上一次状态的errorCovPost矩阵 (convariance协方差)
Q: 系统过程噪声协方差,对应opencv里kalman滤波器的processNoiseCov矩阵
/***********************************************************************************************************************************/
第二部分:
式(3): 增益的计算
Kg(k):k时刻的kalman增益,为估计量的方差占总方差(估计量方差和测量方差)的比重,对应opencv里kalman滤波器的gain矩阵
H: 系统测量矩阵,对应opencv里kalman滤波器的measurementMatrix矩阵
R: 测量噪声协方差,对应opencv里的kalman滤波器的measurementNoiseCov矩阵
/************************************************************************************************************************************/
第三部分:
式(4)--(5): k时刻的更新
式(4): 计算k时刻系统状态最优值
X(k|k): k时刻系统状态的最优结果,对应opencv里kalman滤波器的k时刻状态的statePost矩阵
Z(k): k时刻系统测量值
式(5): 计算k时刻系统最优结果对应的协方差
P(k|k): k时刻系统最优结果对应的协方差,对应opencv里kalman滤波器的errorCovPost矩阵
./************************************************************************************************************************************/
例如:KalmanFilter KF(stateNum, measureNum, 0);
Fk : KF.transitionMatrix
Hk : KF.measurementMatrix
Qk : KF.processNoiseCov
Rk : KF.measurementNoiseCov
Pk : KF.errorCovPost
有时也需要定义Bk : KF.controlMatrix















 1737
1737











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









