







设备信息
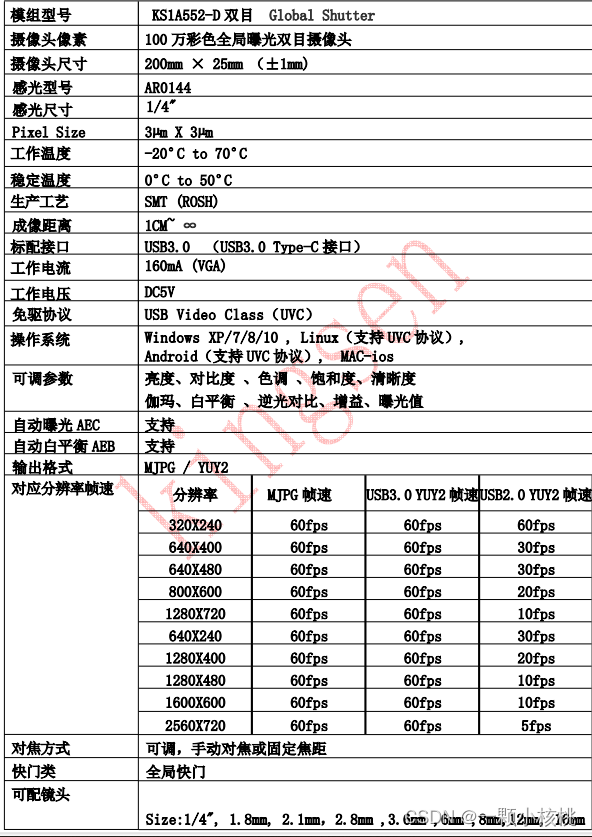
我使用的是金乾象KS1A552-D双目摄像头。它由一根USB-typeC数据线向电脑传递双摄像头的视频数据。具体参数如下:
计算机处理器为intel 9th Gen-i5、编译器为pycharm。
调用流程
调用的代码非常多,可以自行搜索,我只强调调用摄像头过程中遇到问题的地方。
1.导入opencv包,创建左右窗口的名字
import cv2 as cv2
cv2.namedWindow('left')
cv2.namedWindow('right')2.开启摄像头
camera = cv2.VideoCapture(1) 一定一定要注意cv2.VideoCapture(1),这个“1”是会根据摄像头连接的序号不同的。我这里是“1”,你的可能是“0”“2”,如果在这一行报错,可以尝试修改这里。
3.摄像头参数设定
camera.set(cv2.CAP_PROP_FRAME_WIDTH, 2560)
camera.set(cv2.CAP_PROP_FRAME_HEIGHT, 720)
camera.set(cv2.CAP_PROP_FPS, 60)
camera.se 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 2448
2448

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









