






1. Q-Learning是强化学习算法中Value-based中的一种算法,Q即为Q(s,a)就是在某一时刻的s状态下(s∈S),采取动作a (a∈A)动作能够获得收益的期望,环境会根据agent的动作反馈相应的回报reward r,所以算法的主要思想就是将State与Action构建成一张Q-table来存储Q值,然后根据Q值来选取能够获得最大的收益的动作。
更简单的理解就是我们基于状态s利用ε−greedy法进行贪婪选择出动作a,然后执行动作a,得出下一状态s'以及reward r,有了这些值就可以做Q-table的更新了,更新公式如下:

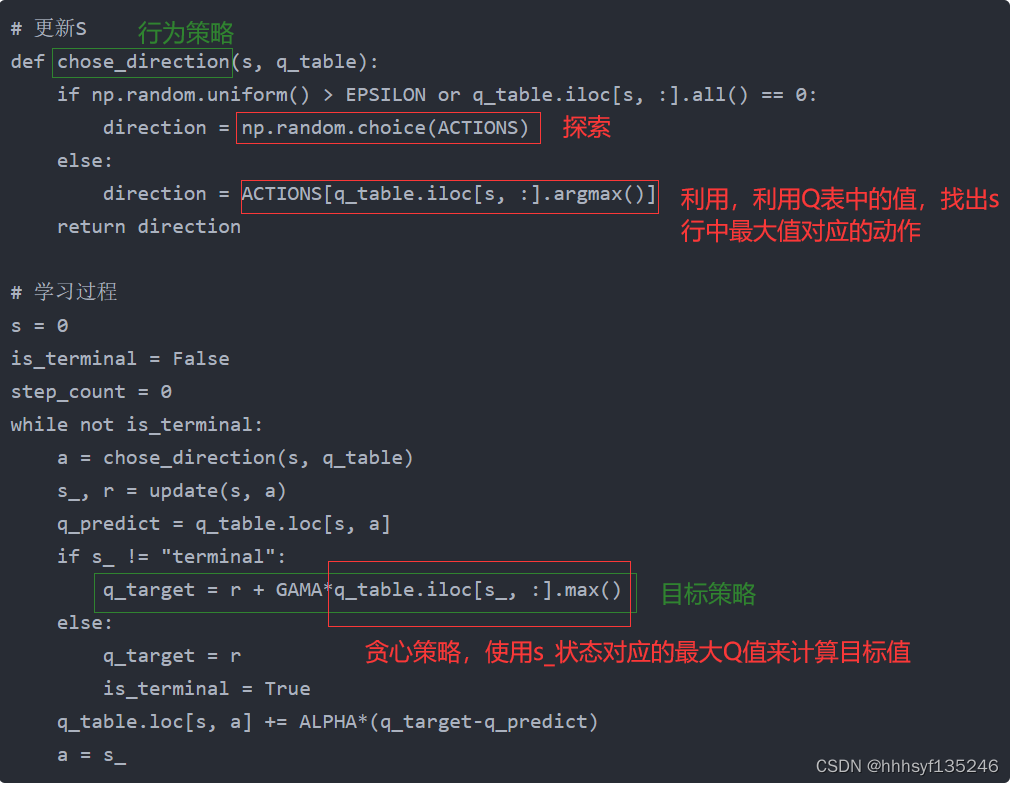
对应的参考代码部分如下:
# 更新S
def chose_direction(s, q_table):
if np.random.uniform() > EPSILON or q_table.iloc[s, :].all() == 0:
direction = np.random.choice(ACTIONS)
else:
direction = ACTIONS[q_table.iloc[s, :].argmax()]
return direction
# 学习过程
s = 0
is_terminal = False
step_count = 0
while not is_terminal:
a = chose_direction(s, q_table)
s_, r = update(s, a)
q_predict = q_table.loc[s, a]
if s_ != "terminal":
q_target = r + GAMA*q_table.iloc[s_, :].max()
else:
q_target = r
is_terminal = True
q_table.loc[s, a] += ALPHA*(q_target-q_predict)
a = s_其中:看到Q-learning算法的行为策略和目标策略不同,因此为异策略(off-policy)。
2. Sarsa的行为策略部分和Q-Learning一模一样,都是采用Q表的方式进行决策,我们会在Q表中挑选values比较大的动作实施在环境中来换取奖赏。但是Sarsa的更新是不一样的。'sarsa'五个字母的含义即s(当前在状态),a(当前行为),r(奖励),s(下一步状态),a(下一步行为),也就是说我们在进行这一步操作时已经想到当前s对应的a,并且想好了下一个s'和a'。
Sarsa的公式如下:

以下是Sarsa更新的主要代码:
s = 0
is_terminal = False
step_count = 0
a = chose_direction(s, q_table)
while not is_terminal:
s_, r = update(s, s)
q_predict = q_table.loc[s, a]
if s != "terminal" and s_ != "terminal":
a_ = chose_direction(s_, q_table)
q_target = r + GAMA*q_table.loc[s_, a_]
else:
q_target = r
is_terminal = True
q_table.loc[s,a] += ALPHA*(q_target-q_predict)
s = s_
a = a_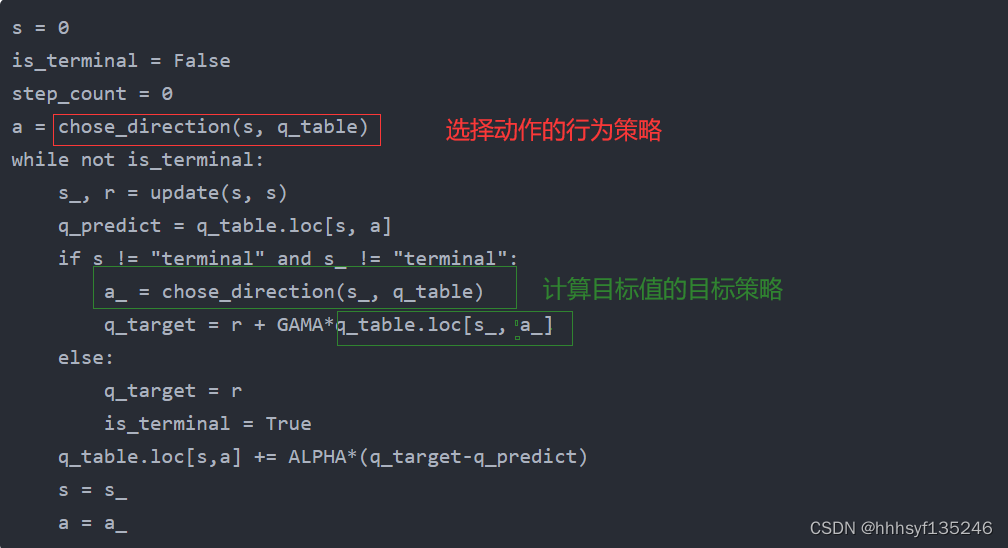
可以看到行为策略和目标策略使用同一个函数,因此SARSA为同策略(on-policy)。















 219
219











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









