







代码转自ShangtongZhang RL
图片截自 reinforcement learning an introduction
Chap 4 Dynamic Programming
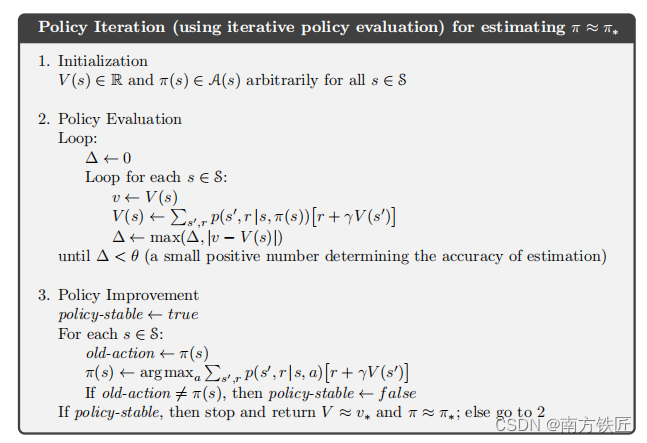
4.3 Policy Iteration
题4.2 租车还车问题
- 对所有状态,本题即为AB两点的车的数量作为xy轴,建立二维矩阵,矩阵的每个值即为value
- 遍历所有的AB可能的组合,在每个组合中,遍历所有可能的AB两点的租车换车数量,每次都计算reward,reward即为租出去的利润减去搬车的成本,并且将reward与对应的概率做乘累加,得到每个组合的value,value一直持续更新,直到稳定,即为policy evaluation
- 根据value数值,遍历所有的AB可能的组合,在每个组合中的都取argmax,直到policy稳定,即为policy iteration
- 持续2和3,直到稳定
截取的部分代码片段
def expected_return(state, action, state_value, constant_returned_cars):
# go through all possible rental requests
for rental_request_first_loc in range(POISSON_UPPER_BOUND):
for rental_request_second_loc in range(POISSON_UPPER_BOUND):
# get credits for renting
reward = (valid_rental_first_loc + valid_rental_second_loc) * RENTAL_CREDIT
num_of_cars_first_loc -= valid_rental_first_loc
num_of_cars_second_loc -= valid_rental_second_loc
if constant_returned_cars:
# get returned cars, those cars can be used for renting tomorrow
returned_cars_first_loc = RETURNS_FIRST_LOC
returned_cars_second_loc = RETURNS_SECOND_LOC
num_of_cars_first_loc = min(num_of_cars_first_loc + returned_cars_first_loc, MAX_CARS)
num_of_cars_second_loc = min(num_of_cars_second_loc + returned_cars_second_loc, MAX_CARS)
returns += prob * (reward + DISCOUNT * state_value[num_of_cars_first_loc, num_of_cars_second_loc])
return returns
def figure_4_2(constant_returned_cars=True):
while True:
# policy evaluation (in-place)
while True:
old_value = value.copy()
for i in range(MAX_CARS + 1):
for j in range(MAX_CARS + 1):
new_state_value = expected_return([i, j], policy[i, j], value, constant_returned_cars)
value[i, j] = new_state_value
max_value_change = abs(old_value - value).max()
print('max value change {}'.format(max_value_change))
if max_value_change < 1e-4:
break
# policy improvement
policy_stable = True
for i in range(MAX_CARS + 1):
for j in range(MAX_CARS + 1):
old_action = policy[i, j]
action_returns = []
for action in actions:
if (0 <= action <= i) or (-j <= action <= 0):
action_returns.append(expected_return([i, j], action, value, constant_returned_cars))
else:
action_returns.append(-np.inf)
new_action = actions[np.argmax(action_returns)]
policy[i, j] = new_action
if policy_stable and old_action != new_action:
policy_stable = False
print('policy stable {}'.format(policy_stable))
完整代码
#######################################################################
# Copyright (C) #
# 2016 Shangtong Zhang(zhangshangtong.cpp@gmail.com) #
# 2016 Kenta Shimada(hyperkentakun@gmail.com) #
# 2017 Aja Rangaswamy (aja004@gmail.com) #
# Permission given to modify the code as long as you keep this #
# declaration at the top #
#######################################################################
import matplotlib
import matplotlib.pyplot as plt
import numpy as np
import seaborn as sns
from scipy.stats import poisson
matplotlib.use('Agg')
# maximum # of cars in each location
MAX_CARS = 20
# maximum # of cars to move during night
MAX_MOVE_OF_CARS = 5
# expectation for rental requests in first location
RENTAL_REQUEST_FIRST_LOC = 3
# expectation for rental requests in second location
RENTAL_REQUEST_SECOND_LOC = 4
# expectation for # of cars returned in first location
RETURNS_FIRST_LOC = 3
# expectation for # of cars returned in second location
RETURNS_SECOND_LOC = 2
DISCOUNT = 0.9
# credit earned by a car
RENTAL_CREDIT = 10
# cost of moving a car
MOVE_CAR_COST = 2
# all possible actions
actions = np.arange(-MAX_MOVE_OF_CARS, MAX_MOVE_OF_CARS + 1)
# An up bound for poisson distribution
# If n is greater than this value, then the probability of getting n is truncated to 0
POISSON_UPPER_BOUND = 11
# Probability for poisson distribution
# @lam: lambda should be less than 10 for this function
poisson_cache = dict()
def poisson_probability(n, lam):
global poisson_cache
key = n * 10 + lam
if key not in poisson_cache:
poisson_cache[key] = poisson.pmf(n, lam)
return poisson_cache[key]
def expected_return(state, action, state_value, constant_returned_cars):
"""
@state: [# of cars in first location, # of cars in second location]
@action: positive if moving cars from first location to second location,
negative if moving cars from second location to first location
@stateValue: state value matrix
@constant_returned_cars: if set True, model is simplified such that
the # of cars returned in daytime becomes constant
rather than a random value from poisson distribution, which will reduce calculation time
and leave the optimal policy/value state matrix almost the same
"""
# initailize total return
returns = 0.0
# cost for moving cars
returns -= MOVE_CAR_COST * abs(action)
# moving cars
NUM_OF_CARS_FIRST_LOC = min(state[0] - action, MAX_CARS)
NUM_OF_CARS_SECOND_LOC = min(state[1] + action, MAX_CARS)
# go through all possible rental requests
for rental_request_first_loc in range(POISSON_UPPER_BOUND):
for rental_request_second_loc in range(POISSON_UPPER_BOUND):
# probability for current combination of rental requests
prob = poisson_probability(rental_request_first_loc, RENTAL_REQUEST_FIRST_LOC) * \
poisson_probability(rental_request_second_loc, RENTAL_REQUEST_SECOND_LOC)
num_of_cars_first_loc = NUM_OF_CARS_FIRST_LOC
num_of_cars_second_loc = NUM_OF_CARS_SECOND_LOC
# valid rental requests should be less than actual # of cars
valid_rental_first_loc = min(num_of_cars_first_loc, rental_request_first_loc)
valid_rental_second_loc = min(num_of_cars_second_loc, rental_request_second_loc)
# get credits for renting
reward = (valid_rental_first_loc + valid_rental_second_loc) * RENTAL_CREDIT
num_of_cars_first_loc -= valid_rental_first_loc
num_of_cars_second_loc -= valid_rental_second_loc
if constant_returned_cars:
# get returned cars, those cars can be used for renting tomorrow
returned_cars_first_loc = RETURNS_FIRST_LOC
returned_cars_second_loc = RETURNS_SECOND_LOC
num_of_cars_first_loc = min(num_of_cars_first_loc + returned_cars_first_loc, MAX_CARS)
num_of_cars_second_loc = min(num_of_cars_second_loc + returned_cars_second_loc, MAX_CARS)
returns += prob * (reward + DISCOUNT * state_value[num_of_cars_first_loc, num_of_cars_second_loc])
else:
for returned_cars_first_loc in range(POISSON_UPPER_BOUND):
for returned_cars_second_loc in range(POISSON_UPPER_BOUND):
prob_return = poisson_probability(
returned_cars_first_loc, RETURNS_FIRST_LOC) * poisson_probability(returned_cars_second_loc, RETURNS_SECOND_LOC)
num_of_cars_first_loc_ = min(num_of_cars_first_loc + returned_cars_first_loc, MAX_CARS)
num_of_cars_second_loc_ = min(num_of_cars_second_loc + returned_cars_second_loc, MAX_CARS)
prob_ = prob_return * prob
returns += prob_ * (reward + DISCOUNT *
state_value[num_of_cars_first_loc_, num_of_cars_second_loc_])
return returns
def figure_4_2(constant_returned_cars=True):
value = np.zeros((MAX_CARS + 1, MAX_CARS + 1))
policy = np.zeros(value.shape, dtype=np.int)
iterations = 0
_, axes = plt.subplots(2, 3, figsize=(40, 20))
plt.subplots_adjust(wspace=0.1, hspace=0.2)
axes = axes.flatten()
while True:
fig = sns.heatmap(np.flipud(policy), cmap="YlGnBu", ax=axes[iterations])
fig.set_ylabel('# cars at first location', fontsize=30)
fig.set_yticks(list(reversed(range(MAX_CARS + 1))))
fig.set_xlabel('# cars at second location', fontsize=30)
fig.set_title('policy {}'.format(iterations), fontsize=30)
# policy evaluation (in-place)
while True:
old_value = value.copy()
for i in range(MAX_CARS + 1):
for j in range(MAX_CARS + 1):
new_state_value = expected_return([i, j], policy[i, j], value, constant_returned_cars)
value[i, j] = new_state_value
max_value_change = abs(old_value - value).max()
print('max value change {}'.format(max_value_change))
if max_value_change < 1e-4:
break
# policy improvement
policy_stable = True
for i in range(MAX_CARS + 1):
for j in range(MAX_CARS + 1):
old_action = policy[i, j]
action_returns = []
for action in actions:
if (0 <= action <= i) or (-j <= action <= 0):
action_returns.append(expected_return([i, j], action, value, constant_returned_cars))
else:
action_returns.append(-np.inf)
new_action = actions[np.argmax(action_returns)]
policy[i, j] = new_action
if policy_stable and old_action != new_action:
policy_stable = False
print('policy stable {}'.format(policy_stable))
if policy_stable:
fig = sns.heatmap(np.flipud(value), cmap="YlGnBu", ax=axes[-1])
fig.set_ylabel('# cars at first location', fontsize=30)
fig.set_yticks(list(reversed(range(MAX_CARS + 1))))
fig.set_xlabel('# cars at second location', fontsize=30)
fig.set_title('optimal value', fontsize=30)
break
iterations += 1
plt.savefig('../images/figure_4_2.png')
plt.close()
if __name__ == '__main__':
figure_4_2()















 1626
1626











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









