






FOC 初始脉冲定位 6脉冲注入 精度±15度 可用于FOC的初始位置识别。
精度高于常见的BLDC的脉冲注入。
源码,原理图。
FOC初始脉冲定位技术的研究与应用
摘要:随着无刷直流电机(BLDC)的广泛应用,FOC初始脉冲定位技术作为一种高精度的初始定位方法备受关注。本文介绍了FOC初始脉冲定位技术的原理和优势,并详细阐述了其在脉冲注入方面的精度优势。最后,本文还给出了FOC初始脉冲定位技术的发货清单,并强调了其在发货过程中的默认发网盘方式。
1. 引言
无刷直流电机(BLDC)作为一种高效可靠的电机控制方案,被广泛应用于各种场合。而在BLDC的初始定位过程中,FOC初始脉冲定位技术因其高精度而备受瞩目。本文将重点介绍FOC初始脉冲定位技术的原理及其在脉冲注入方面相对于常见的BLDC的优势。
2. FOC初始脉冲定位技术的原理
FOC初始脉冲定位技术基于电机相位的精确测量,通过在电机启动阶段注入特定脉冲信号,并结合位置传感器的反馈,实现对电机的准确定位。其原理主要包括两个关键步骤:FOC的初始位置识别和脉冲注入。
2.1 FOC的初始位置识别
FOC的初始位置识别是FOC初始脉冲定位技术的第一步,其目的是确定电机转子的初始位置。该过程通过确定电机的相位和旋转方向,并与位置传感器的信号进行比较,从而识别出电机的初始位置。FOC初始位置识别的准确性对后续的脉冲注入过程至关重要。
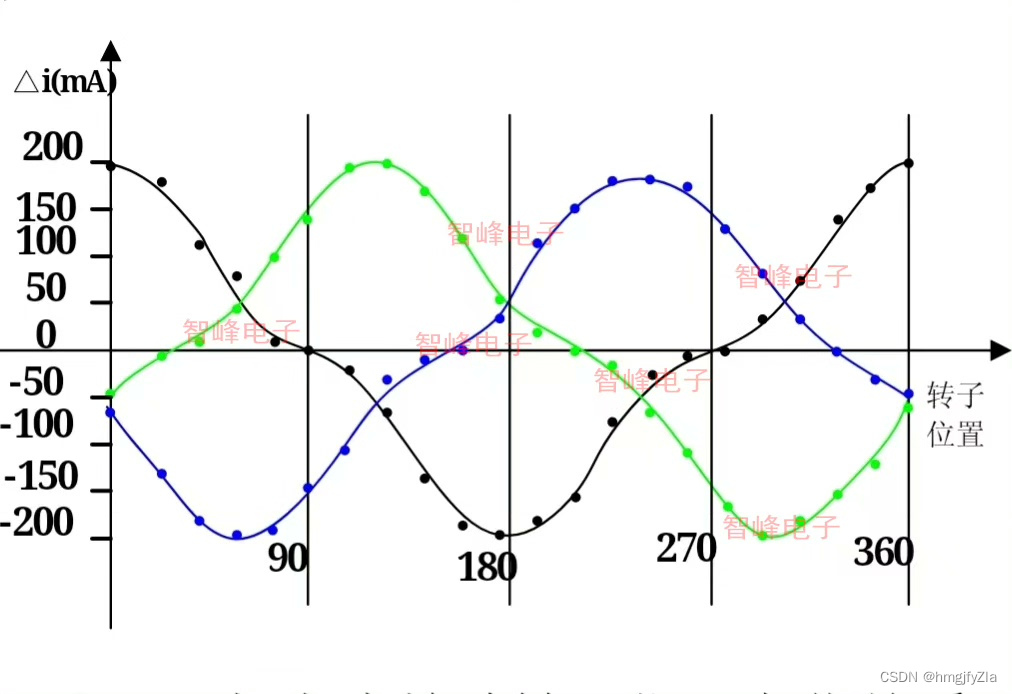
2.2 脉冲注入
FOC初始脉冲定位技术的核心是脉冲注入过程,其通过在电机初始位置附近注入特定的脉冲信号,以引导电机旋转到精确的初始位置。与常见的BLDC脉冲注入技术相比,FOC初始脉冲定位技术具有更高的注入精度,可将注入误差控制在±15度以内。
3. FOC初始脉冲定位技术的优势
相较于传统的BLDC脉冲注入技术,FOC初始脉冲定位技术具有以下优势:
3.1 高精度
FOC初始脉冲定位技术通过精确测量电机相位,结合位置传感器的反馈,实现了更高的初始位置识别精度。其脉冲注入过程的精度高于常见的BLDC的脉冲注入,可将注入误差控制在±15度以内,为后续的电机控制提供了更准确的初始位置信息。
3.2 简化设计
FOC初始脉冲定位技术的应用简化了电机系统的设计。通过利用FOC的初始位置识别和脉冲注入过程,可以减少系统所需的传感器数量,并简化了控制算法的实现,降低了系统的复杂度。
4. 发货清单
在FOC初始脉冲定位技术的应用中,我们提供了以下发货清单,以方便客户的实施和使用:
4.1 源码
为了帮助客户理解和应用FOC初始脉冲定位技术,我们提供了相关的源码。通过研究源码,客户可以更好地理解FOC初始脉冲定位技术的实现原理,并在实际应用中进行相应的调整和优化。
4.2 原理图
除源码外,我们还提供了FOC初始脉冲定位技术的原理图。原理图将电路连接和信号流程进行了清晰的说明,有助于客户在系统设计和调试过程中进行参考。
5. 默认发网盘
为了方便发货和客户的使用,我们默认采用发网盘的方式进行交付。客户可以通过网盘下载所需的源码和原理图等相关资料。同时,我们也鼓励客户在应用过程中与我们保持及时沟通,以确保顺利实施和使用。
6. 结论
本文详细介绍了FOC初始脉冲定位技术的原理和优势,并给出了相应的发货清单。FOC初始脉冲定位技术通过精确的初始位置识别和脉冲注入过程,为无刷直流电机的控制提供了更高的精度和便利性。我们相信,在FOC初始脉冲定位技术的应用中,我们所提供的源码、原理图和默认发网盘方式将为客户的实施和使用提供有力的支持。
注:本文内容仅供参考,具体实施过程需根据实际情况进行调整和优化。
相关代码,程序地址:http://imgcs.cn/lanzoun/747721450864.html















 2078
2078











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









