










引言
本章方法基于论文《An Improved Pulse Voltage Injection Based Initial Rotor Position Estimation Method for PMSM》-基于永磁同步电机的改进型脉冲注入初始转子位置估计方法。
模型主要基于以下链接:
[老叶说事-146期]永磁同步马达初始位置侦测技术:https://www.bilibili.com/video/BV1um4y1p7wJ/?spm_id_from=333.337.search-card.all.click&vd_source=5f570a9f261c43941608688d2d31a4c5
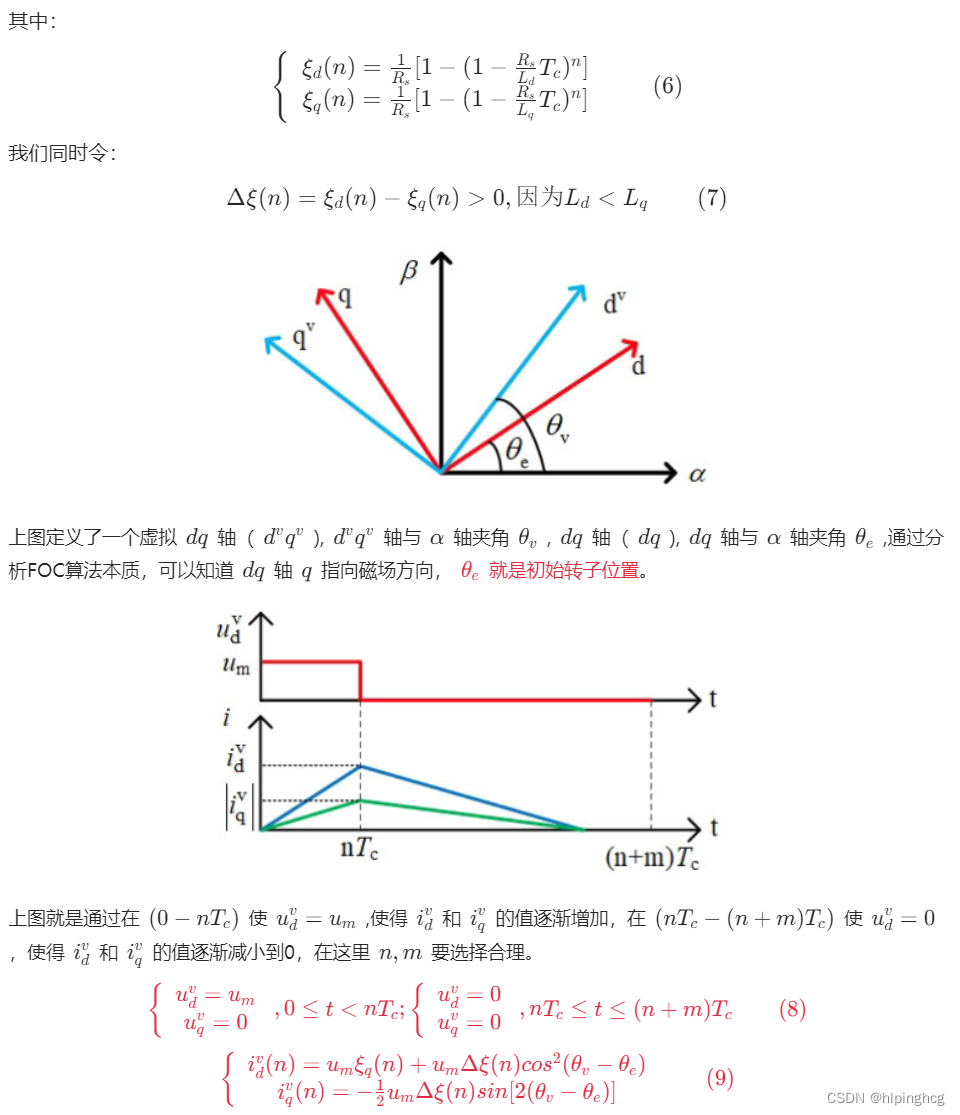
论文摘要:获得永磁同步电机的初始转子位置对于防止转子的反转并确保启动过程中的最大电磁转矩输出是必要的。本文提出了一种基于脉冲电压注入的初始转子位置估计方法。与传统的基于脉冲电压注入的方法仅利用注入永磁同步电机的电压矢量的虚拟d轴电流信息不同,该方法还采用了虚拟q轴电流的信息,以减少电流采样误差引起的估计误差。实验结果表明,估计精度可以大大提高。
文中提到两种初始位置辨识方法:
● 高频注入(HFSI,high-frequency signals injection)
● 脉冲注入(PSI,pulse signals injection)
基于HFSI的方法,将高频正弦波或方波信号注入到永磁同步电动机中,设计信号解调策略,根据永磁同步电动机的高频响应估计初始转子位置(IRP)。对于注入高频正弦信号的HFSI方法,信号解调过程通常采用低通或(和)带通滤波器,这可能导致收敛时间长,控制带宽有限。在上述HFSI方法中,由于永磁同步电动机的电感作为二次空间谐波周期性变化,转子磁体的极性不能由永磁同步电动机的高频响应来确定。因此,需要额外的磁极检测方案,这增加了复杂性。
基于PSI的方法根据PMSM在不同方向注入脉冲电压或电流的情况下的电流响应模型来估计IRP,可分为脉冲电压注入法(PVI)和脉冲电流注入法(PCI)两种。
PVI是基于电压矢量(VV)的虚拟d轴电流随着注入的VV接近转子的N极而增加的原理。
PCI是基于注入受控脉冲电流的PCI方法,但需要额外的电压传感器来完成对逆变器端电压的测量。
对于基于PSI的方法,估计精度依赖于注入VV的幅值,当前采样误差对估计精度也有一定的影响。与基于HFSI的方法相比,基于PSI的方法更容易实现,不需要复杂的信号解调和磁极性检测过程。
然而,传统的基于PVI的方法得到的是静止状态下PMSM虚拟d轴电流(
i
d
v
i^v_d
idv)响应的IRP,而没有利用虚拟q轴电流(
i
q
v
i^v_q
iqv)响应信息。通过分析永磁同步电机静止状态下的电流响应模型,发现当注入VV的角度接近IRP时,虚拟d轴电流的变化很小。当
i
d
v
i^v_d
idv的采样误差大于注入VV角度变化引起的
i
d
v
i^v_d
idv的变化时,可能无法正确计算
i
d
v
i^v_d
idv的实际大小关系。因此,传统方法的初始位置检测精度受电流采样误差的影响较大。为了解决这一问题,论文研究了一种基于虚拟d轴和虚拟q轴电流响应的改进PVI方法。由于注入VV的角度接近IRP时,
i
q
v
i^v_q
iqv的变化相对大于
i
d
v
i^v_d
idv的变化,因此利用
i
q
v
i^v_q
iqv的信息减小了当前采样误差对IRP的估计误差。实验结果验证了该方法的有效性。
公式推导

误差分析
算法
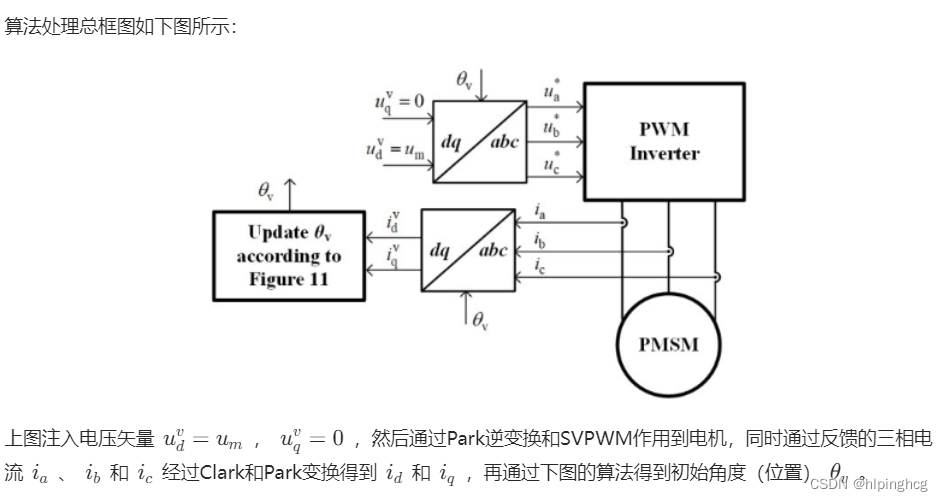

建模实现算法

PMSM转子初始位置侦测模块:
function [y1, y2] = fcn(u1)
Ts = 1e-4; %100us
theta_V=0:pi/12:2*pi;
Um = 30;
n=5; m=300;
period = (n+m)*Ts;
a = floor(u1/period); %四舍五入取整
b = mod(u1, period); %取余(取模)
c = floor(a/25); %四舍五入取整
if((u1 <= (a*period + n*Ts)) && (a<25))
y1 = Um;
y2 = theta_V(a+1);
else
y1 = 0;
y2 = theta_V(a+1);
end
脉冲注入信号:
id最大值:
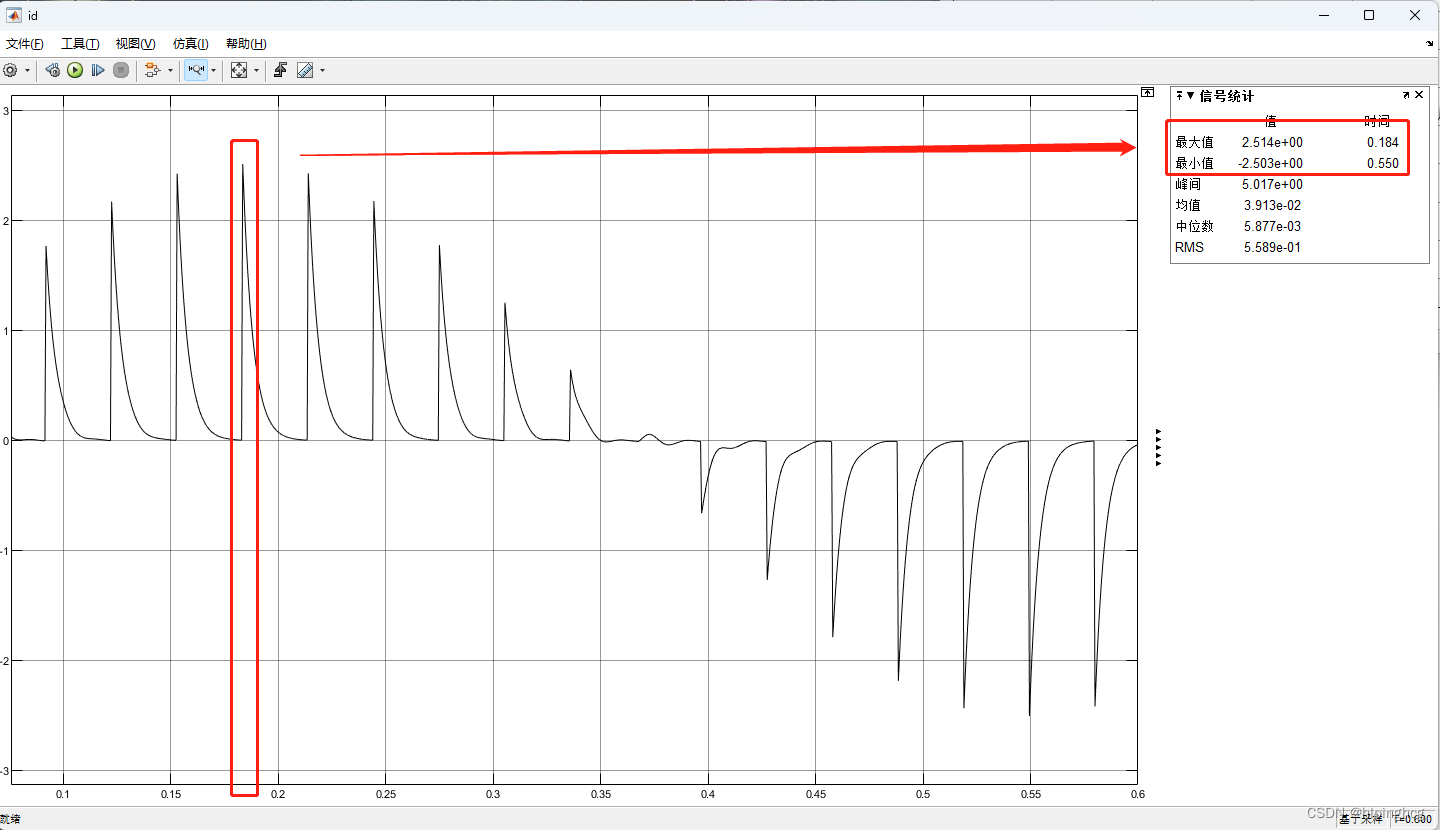
iq最小值:

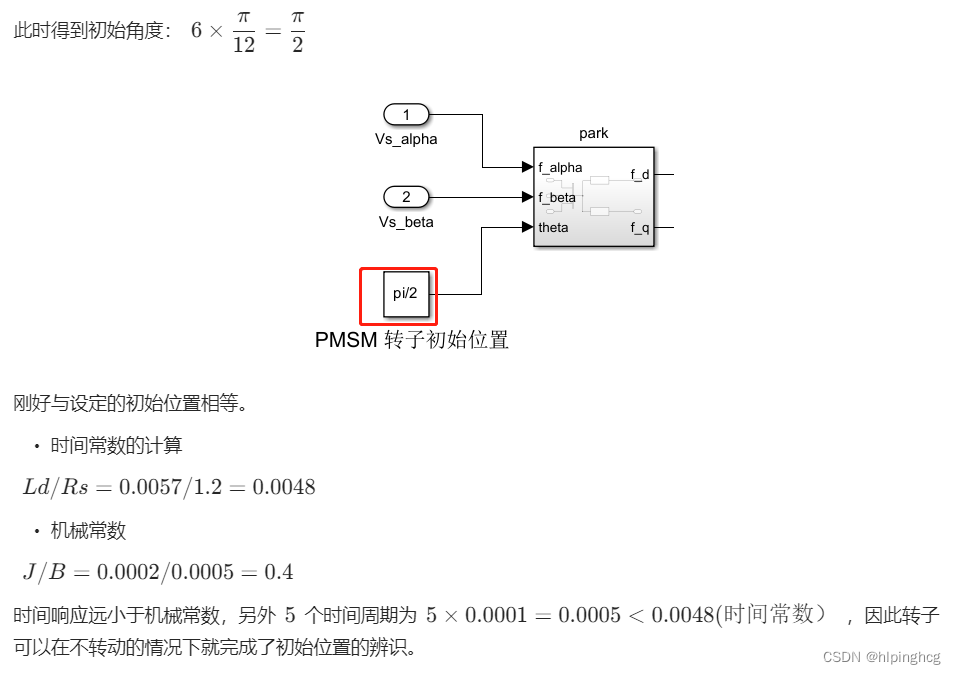
可以得到此时的角度正好位于脉冲注入波形的第6个:
关于模型的一些问题可以看上面视频的链接的衍生和修改模型,讲的还挺不错的。

















 1923
1923











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











