






一、两个常见问题
为什么感应电机(异步机)不需要初始位置辨识?(因此感应电机转子磁场在定子侧进行励磁,其初始位置可以始终人为定义为0)
为什么同步磁阻电机需要初始位置辨识?(因为需要提前找到最小磁阻方向在哪里)同步磁阻电机(SynRM)是一种特殊的交流电机,由于同步磁阻电机的运行依赖于定转子间磁通路径的最小磁阻方向,因此初始位置辨识对于这类电机的正确启动和高效运行至关重要。
二、初始位置辨识
前提假设:电机静止或者以较低的速度正在旋转。且除了提前强行高速拖动电机之外(此情况为转速跟踪启动,即检测正在中高速运行的同步电机初始位置)。
常用方法
永磁同步电机(PMSM)初始位置检测是电机启动前或重新定位时必须完成的关键步骤,其目的是准确获取转子磁极相对于定子绕组的初始角度信息。这对于实现精确的磁场定向控制(FOC)、启动过程的平稳过渡以及后续高效稳定的电机运行(尤其是不能反转的应用场合和带最大负载启动的应用场合)至关重要。以下是几种常见的同步电机初始位置检测方法:(除了使用位置传感器,除了绝对位置传感器,其他位置传感器也需要初始位置辨识等方案来离线识别编码器初始安装角度)
(1)电压脉冲法:通过向电机施加特定的电压矢量序列,并测量相应的电流响应,分析电流变化来推断转子初始位置。这种方法通常包括注入测试电压、采集电流信号、计算电感矩阵及求解位置角等步骤。
(2)高频注入法: 当前即使是脉振方波电压高频注入,暂时不能适用于大多数SPM,仅用于SRM和IPM(常规实施步骤见附录)。此外该类方案还需要单独的NS极辨识(基频直轴电流试探法 或 高频直轴电流进行提取)。
同步电机初始位置检测可以通过多种途径实现,选择哪种方法取决于实际应用的需求、成本限制、系统复杂度、精度要求以及是否允许使用附加传感器等因素。在实际应用中,传感器辅助的检测方法往往提供更高的精度和可靠性,而无传感器方法则有利于简化系统结构、降低成本,但可能需要更为复杂的算法支持和特定的操作条件。
有一个研究问题是带输出LC滤波器的电机驱动器如何进行初始位置辨识等离线辨识步骤呢?假设LC滤波器的参数已知,仅对电机驱动器侧的输出电流进行采样。此问题还待研究(已有方案,需要更为复杂的解析计算),当然此类应用场合即使使用V/F或I/F等控制策略也需要初始位置辨识,因此也有研究在进行无需精确初始位置辨识的V/F或I/F控制方案的开发(针对同步机)。
应用需求
初始位置辨识(简称为IPD)关联需求是
(1)由零速直接启动
(2)带载能力的大小
(3)启动无反转角度
(4)仅测量电流 或者 仅测量电压等对硬件的依赖约束
(5)检测时间:百毫秒、数十毫秒到几毫秒
电压脉冲法
(1)可在任意初始位置进行IPD
(2)脉冲时间间隔(防止脉冲与脉冲之间的电流响应互相影响)
(3)单个时间长度(磁饱和程度评估,可以离线以额定电流来测量得到脉冲的时间宽度)
(4)脉冲顺序(防止脉冲与脉冲之间的电流响应互相影响)
(5)可以任意选择一个采样信号:如母线电压(薄膜电容),母线电流,下桥电流、输出电流。
(6)脉冲的总数量(可最小化定位噪声),根据不同的方案有18个(包含两个时间的评估,兼容通用性,因为脉冲的时间长短和 电机电感 和 母线电压 都有关系)、12个(包含一个时间的评估,或者6个的升级版)、6个(常规30度精度,幅值插值、 时间插值 或者 解析计算精度可以进一步提高)、3个(常规精度较低,需要三相输出电流采样)、2个、1个(此类脉冲较少的方案均需要进行过采样来记录电压脉冲所响应出来的过程电流,然后利用过程电流数据进行磁链或电感的计算或迭代,同时计算电机的初始位置信息。)
逆变器示意图(电压脉冲法为以此打开S1S4、S4S5、S5S2、S2S3、S3S6、S6S1)

当前也可以直接利用六个电压矢量(两两相对防止转动),类似SVPWM的方波模式,进行IPD
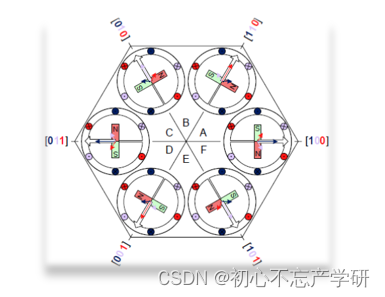
电感饱和曲线:视在电感与增量电感示意图

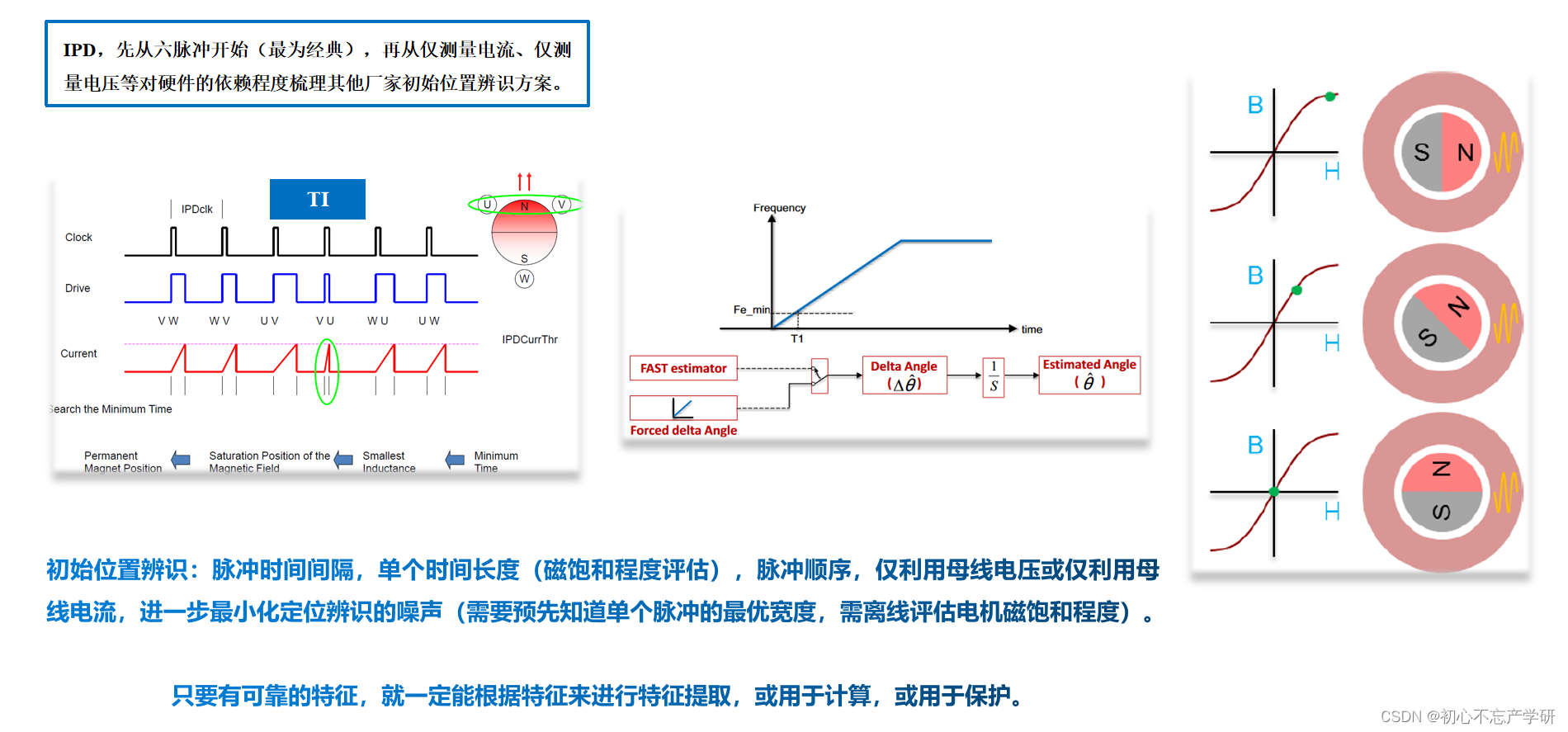
上图借用了TI描述的六脉冲IPD最为经典
另外,需要注意,六脉冲定位,仅采样电流进行插值计算出精度在10度以内(需要3%的电流采样精度)的转子位置角,下图为幅值插值,当然还可联立电流增量与转子位置关系式求解。

附录:HFI
高频注入法是一种广泛应用于永磁同步电机(PMSM)初始位置检测的技术,特别是对于无位置传感器控制(sensorless control)系统。该方法基于向电机定子绕组注入高频电流(通常远高于电机基波频率),并通过分析由此产生的电机响应来确定转子的初始位置。以下是高频注入法进行初始位置检测的基本原理和步骤:
基本原理
1. 注入高频信号:在电机静止或低速状态下,通过逆变器向电机定子绕组注入一个特定频率(如几千赫兹甚至几十千赫兹)的高频电流信号。这个信号可以是正弦波、方波或脉冲序列等形式。
2. 转子反应:由于永磁同步电机转子的凸极效应(即气隙磁场的非均匀性),注入的高频电流会在定子绕组中感应出与转子位置相关的电压或电流响应。这些响应包含了转子位置信息,因为它们与转子磁极相对于定子绕组的位置密切相关。
3. 信号处理与分析:通过检测和分析定子侧的电压或电流响应,提取其中与转子位置相关的特征。这通常涉及滤波、解调、幅值比较、相位差计算等信号处理技术。高频注入法通常利用的是感应电压或电流的二次谐波分量,因为二次谐波响应的相位与转子位置直接关联。
具体步骤
1. 选择合适的高频信号:根据电机特性和控制系统要求,选择合适的高频注入频率、幅度和波形。
2. 注入高频电流:在电机未启动或低速时,通过逆变器向定子绕组注入选定的高频电流。
3. 采集响应信号:在注入期间,实时监测定子绕组上的电压或电流响应,尤其是关注与高频信号对应的二次谐波分量。
4. 特征提取:对采集到的响应信号进行处理,提取与转子位置相关的特征,如二次谐波分量的幅值、相位或频率特性。
5. 位置计算:根据特征提取结果,结合电机模型和预设的数学关系,计算出转子的初始位置。这一步可能涉及解非线性方程、迭代算法或查找表等方法。
6. 位置校准:在某些情况下,可能还需要进行额外的校准步骤,以消除系统误差或补偿非理想因素(比如交叉饱和现象、逆变器死区非线性特征、测量误差)的影响。
特点与优势
无须额外传感器:高频注入法实现了无位置传感器的初始位置检测,降低了系统成本,简化了电机结构,提高了系统可靠性。
适应性强:适用于多种永磁同步电机类型(IPM和SRM),尤其对于内置式永磁电机和磁密较大的表贴式永磁电机效果良好。
鲁棒性好:对电机参数变化和工作环境变化具有一定的鲁棒性,能够在较宽的速度范围内保持较高的检测精度。
易于集成:该方法可以与现有的无位置传感器控制算法无缝集成,无需额外硬件改动。
综上所述,高频注入法作为一种无位置传感器技术,通过向电机定子注入高频电流并分析其响应,能够有效地实现永磁同步电机的初始位置检测,是现代电机控制技术中的重要组成部分。

















 26
26











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











