







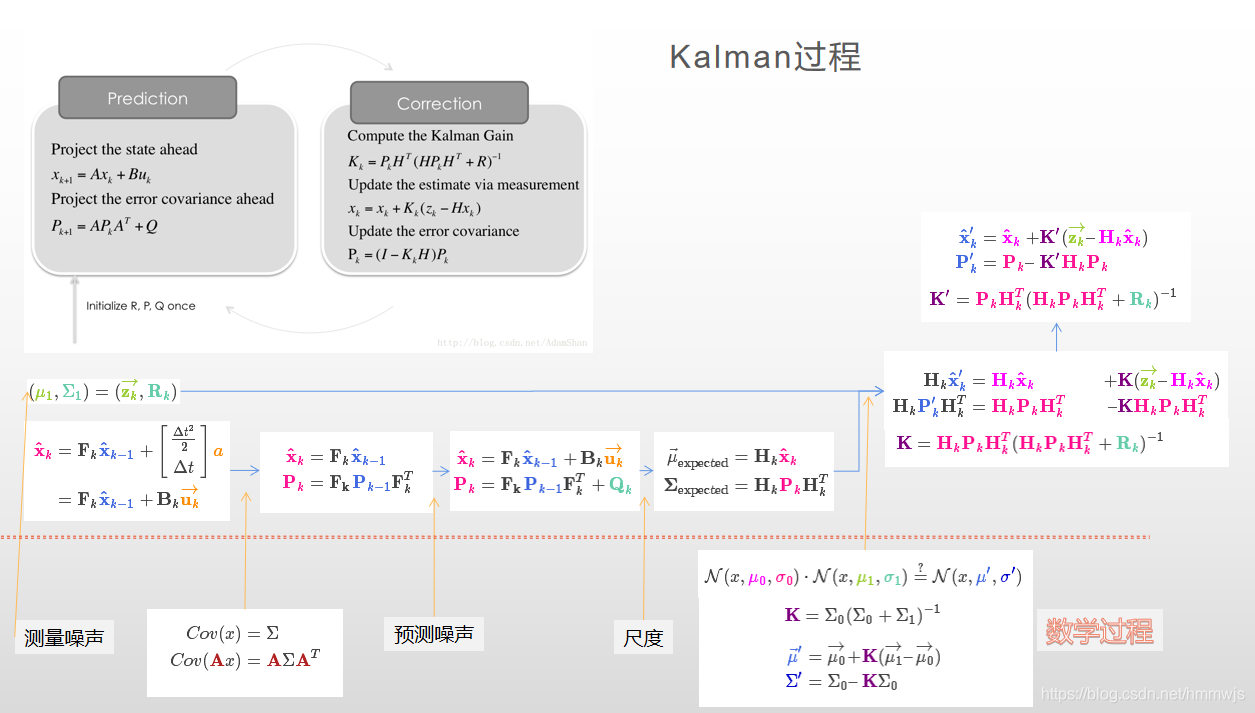
Kalman原理是通过上一时刻的估计值,结合运动模型,预测出当前时刻的值(当前时刻的预测值),再与测量值进行联合高斯分布,最终得到估计值。再以当前时刻的估计值为基础,结合运动模型,对下一时刻进行预测....如此往复迭代下去的算法。
公式来自于:https://blog.csdn.net/u010720661/article/details/63253509
左上角图来自于:https://blog.csdn.net/AdamShan/article/details/78248421
注意的地方:kalman是将预测经过尺度变换H后,再与测量值进行加权。
根据 大名鼎鼎的跟踪算法Sort源码[https://github.com/abewley/sort]采用的kalman库【...\Lib\site-packages\filterpy\kalman\kalman_filter.py】中,kalman计算过程如下:
# = = = 整个计算可以浓缩为 = = = = = =
输入测量值z
输入上次最优值x,若初始,则保存z到x中
x = Fx + Bu
P = F*P*F' + Q
# 有测量值z时:
y=z-H*x
S = H*P*H' + R
K = P*H'*inv(S)
x = x + Ky
P = (I-KH)P(I-KH)' + KRK'
# 无测量值z时:
x=x
P=P
# = = = 备注 = = = = = = = = = = = =
# 更新P时,P = (I-KH)P(I-KH)' + KRK'比P = (I-KH)P更稳定
# 转移矩阵 H*x <-> z

















 3628
3628

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









