







摘要
汽车行业正朝着软件定义汽车(SDV)方向发展,并且与汽车电气化趋势相结合,这就需要采用不同的方法来设计汽车及其网络架构。对于软件定义电动汽车(SDEV)而言,功能灵活性和功率优化对于实现最高性能和成本效益至关重要。带有信号改进功能的CAN部分网络(CAN SIC)有望在这一变革中发挥重要作用。
01 .
硬件和软件可升级的汽车
如今,当你从经销商处购买一辆新车时,你可以选择自己想要的配置,汽车制造商安装相应硬件后交付车辆。如果你之后想要添加额外配置,通常只能在购车后进行,而且成本往往很高。
软件定义汽车的目标之一是实现汽车软件可升级,通过数字购买和无线(OTA)更新来添加功能,而无需安装任何新硬件。这意味着在购车时,汽车就应该预装未来所有预期功能所需的硬件。这给汽车制造商带来了新车销售初期的额外成本,因为他们销售的是配置更多硬件选项的成品车。不过,这些硬件选项最初应该处于禁用和断电状态,一旦终端客户购买相关功能,激活并开启这些额外硬件,就能迅速创造新的收入来源。这与在智能手机上购买新应用程序的情况类似。
02 .
软件定义电动汽车(SDEV)
需要具备动态、选择性地开启/关闭ECU的能力
将这一概念与电动汽车(EV)面临的挑战相结合,由于电动汽车的续航里程完全取决于电池电量和车辆的功耗,因此在不使用时,电子控制单元(ECU)不应完全启用和通电。否则会消耗电池电量,而且持续通电会使电子元件性能下降。相反,我们希望尽可能完全关闭这些ECU的电源,仅在需要它们为汽车提供特定功能时才启用。这不仅能降低功耗(如果不是使用纯绿色能源充电,还能减少二氧化碳排放)、延长续航里程,还能通过尽量减少ECU组件(如微控制器、电阻、电容等)的通电时间,防止其电气组件使用寿命缩短。
03 .
选择性ECU唤醒功能
支持更先进的应用场景
利用选择性唤醒功能,还能实现更先进的应用场景。想象一下共享汽车的概念(租车、共同拥有的车,甚至是汽车制造商拥有的车),车辆的每个用户(司机或乘客)都可以有个性化的功能设置。车辆能够识别车内乘坐人员的身份,甚至可能识别出具体座位,并为每个人启用个性化功能。例如,A用户可能启用了所有功能(导航、座椅加热和通风、座椅按摩功能、高级驾驶辅助系统功能、车内灯光效果等),而B用户可能只启用了一两个功能。无论他们使用哪辆车,这些功能对他们个人来说总是可用的。
再想象一下类似手机低电量模式的汽车低电量模式。当电池电量降至10%时,车辆仅保持关键功能启用。当在导航系统中设置目的地后,如果电池电量不足,汽车可以动态选择禁用某些功能,以确保能够行驶到下一个充电站。
04 .
开启/关闭ECU的实现方案
考虑动态、选择性地开启/关闭ECU的方法,有以下几种可行的实现方案:
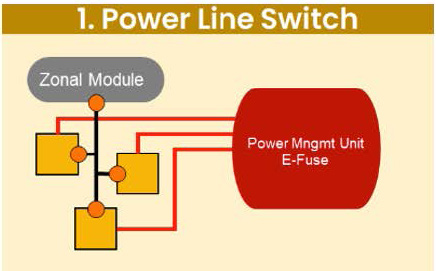
1、使用电子保险丝进行电源线切换:但电子保险丝价格昂贵,还需要额外的电源线,这增加了车辆的成本和重量。电子保险丝目前是并且仍将是电源架构的一部分,因为它们还支持监测和安全功能。不过,为每个ECU都配备一个电子保险丝成本过高,所以电子保险丝通常为一组ECU供电,这些ECU在车辆中物理位置相近或逻辑上属于同一区域。
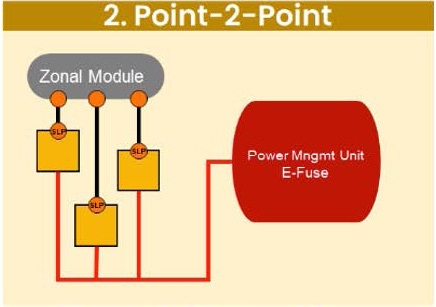
2、中央ECU(如网关、域控制器或区域控制器)与边缘节点ECU之间采用点对点数据连接,并结合支持低功耗模式的收发器:这种方式可以使ECU完全断电。但该解决方案需要在中央ECU处设置多个数据连接和连接器,这不仅增加了成本、故障点(连接器容易出现故障),还会因为每个边缘节点都需要单独布线而导致布线更长。
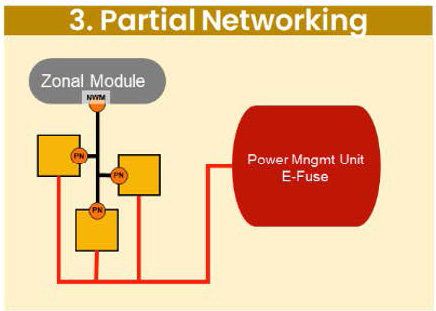
3、具有部分网络/选择性唤醒功能的睡眠模式收发器:这种方案在中央ECU处仅需一个连接,并允许所有边缘节点通过优化的布线进行支线节点连接。不过,软件会稍微复杂一些,因为需要在控制总线功能唤醒请求的分支上运行网络管理软件。
05 .
管理速度和拓扑复杂性
在一辆有许多ECU通过同一通信总线进行通信的整车中,对带宽的要求也会更高。像雷达和激光雷达这样的传感器会生成更精确的图像,这需要更多的数据和带宽。
对于经典CAN(CAN CC)和CAN FD,虽然相关标准支持最高5Mbit/s的速率,但在实际的多节点支线节点拓扑结构中,由于信号振铃问题,实际速率不会超过2Mbit/s。当需要5Mbit/s的速率时,就需要降低拓扑复杂性并减少节点数量。在这种情况下,会创建许多较小的子分支,每个子分支只为车辆内的一两个功能服务。
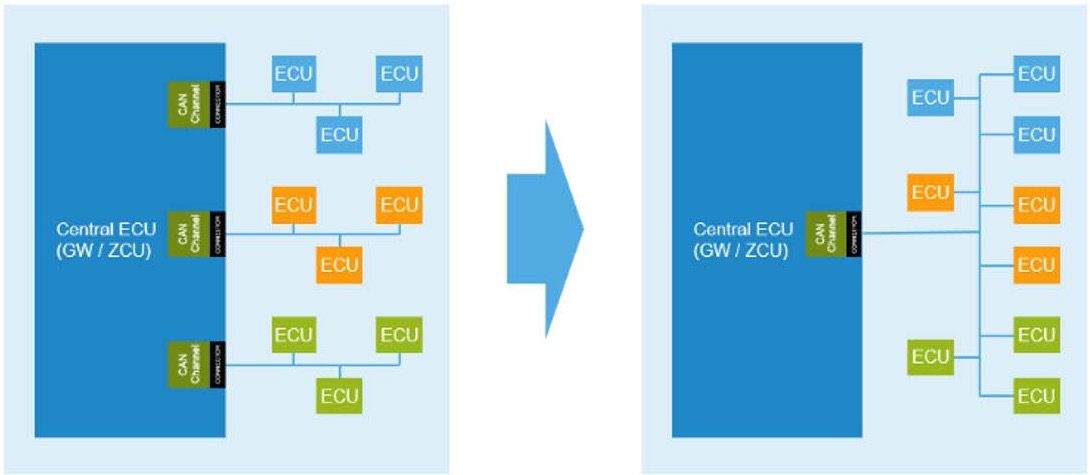
随着CAN信号改进功能(CAN SIC)的引入,速度和拓扑复杂性之间的这种权衡在一定程度上消失了,更多的节点可以连接到单个分支上。然后,这个分支可以支持更多的车辆功能,并且仍然可以通过「虚拟分支」的概念分别访问这些功能。采用更大分支的方案有助于汽车制造商降低布线复杂性,减少微控制器上所需的CAN通道数量以及所需的连接器数量,从而直接降低成本和减轻重量。
06 .
通过带有CAN SIC
的CAN部分网络进行优化
软件定义电动汽车显然需要能够动态、选择性地开启和关闭所有ECU。这样做可以最大限度地减少功耗,为软件定义汽车提供功能灵活性,最大限度地减少ECU的性能下降,从而延长车辆使用寿命。
CAN部分网络为控制ECU提供了系统成本最优化的解决方案。带有部分网络的CAN信号改进功能通过支持在单个分支上连接更多节点并通过虚拟分支激活功能,实现了进一步的优化。这就是CAN部分网络在软件定义电动汽车中的强大之处。
文章来源
本文基于Mike Van Haare(恩智浦)在第18届国际CAN大会(iCC)的演讲。已刊于《第18届iCC会议论文集》2024版,由CiA出版。虹科智能互联团队翻译并分享,旨在与行业同仁共享前沿技术成果。


















 4122
4122

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









