







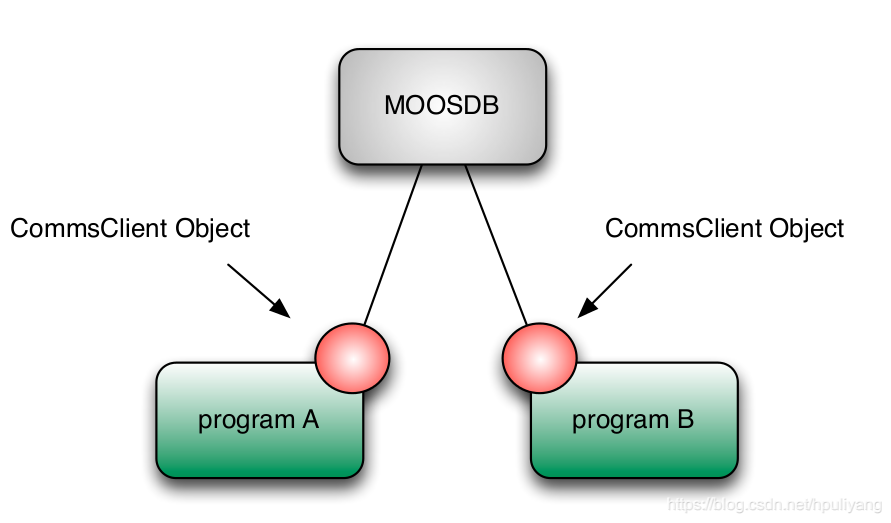
moos-ivp是一套水下机器人系统,结构类似于ros,但是比ros轻便很多,可以很方便地移植到嵌入式设备上。其基于UDP通讯,有一个类似于ros的管理节点MOOSDB,两个程序之间通过类似ros的发布,订阅消息的机制来实现节点之间通讯。如下图:
官网:https://oceanai.mit.edu/moos-ivp/pmwiki/pmwiki.php
1.编译运行
下载
svn co https://oceanai.mit.edu/svn/moos-ivp-aro/releases/moos-ivp-19.8.1 moos-ivp
编译
./build.sh
安装
sudo make install
运行
cd moos-ivp/ivp/missions/s1_alpha
pAntler alpha.moos
显示
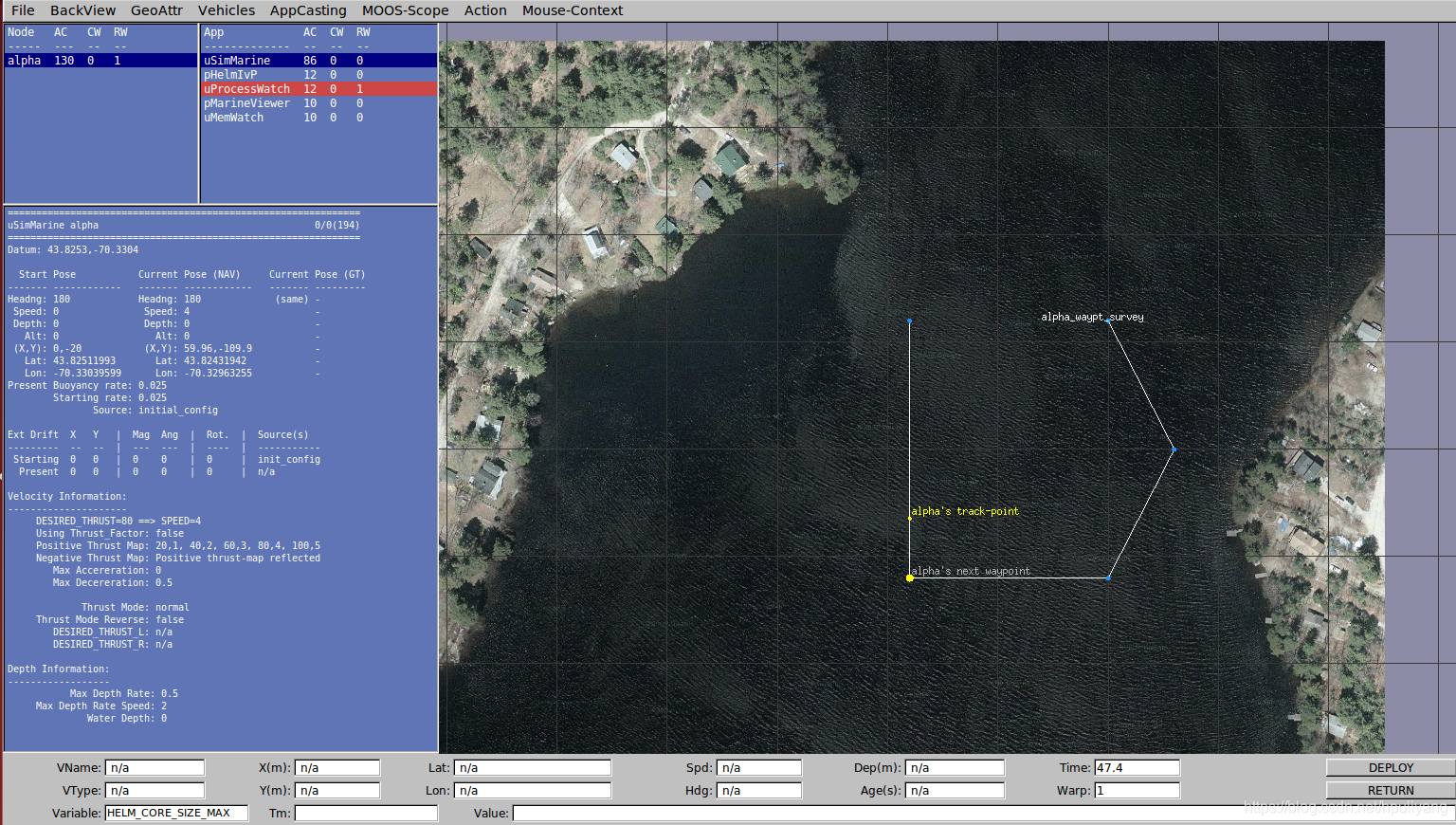
2.一些有用的控件
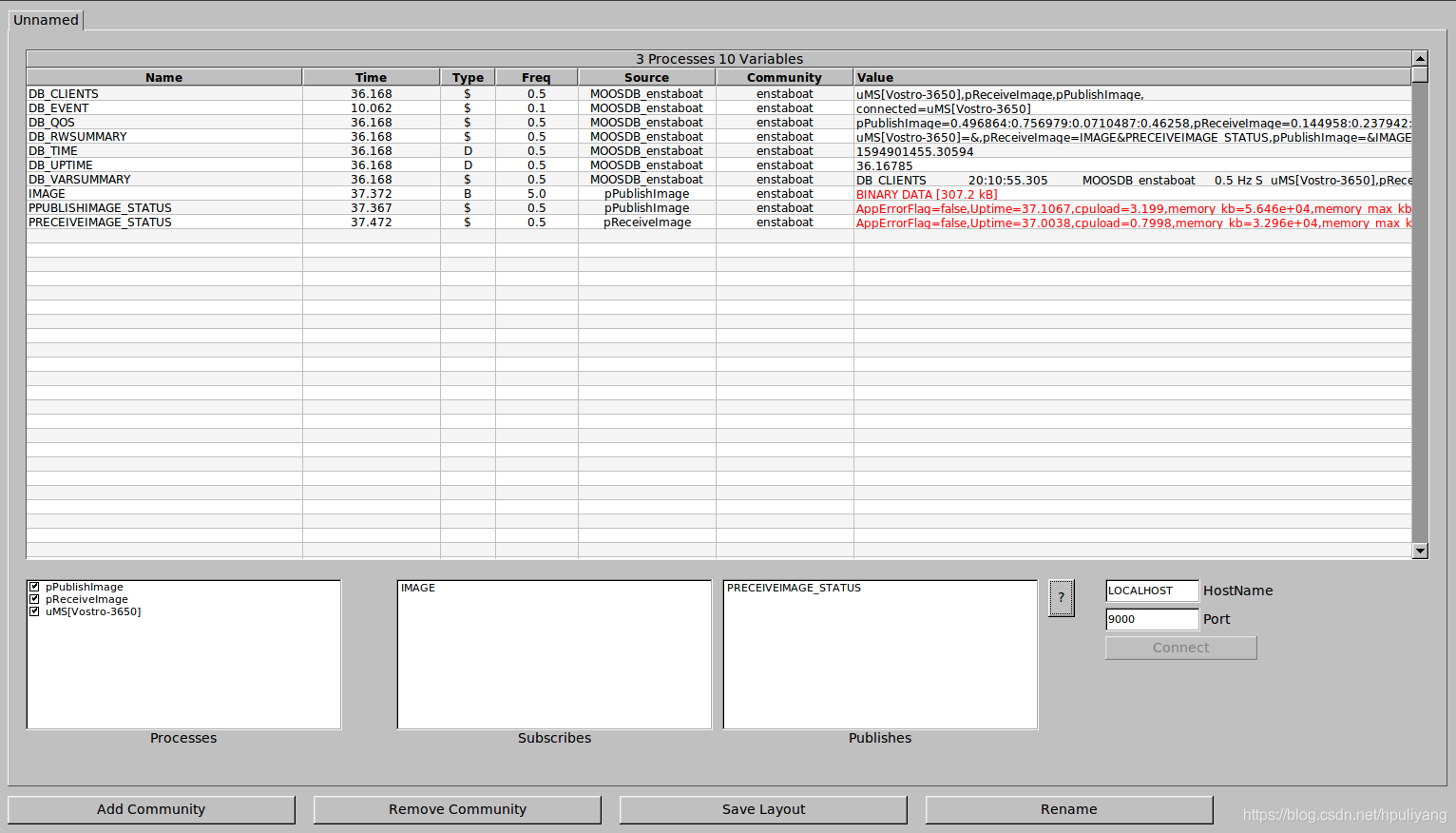
2.1 uMs可以观察每个node的发布订阅消息以及类型,如下图:
 很多功能,用到再说吧,可以自己看官网每个控件使用介绍:
很多功能,用到再说吧,可以自己看官网每个控件使用介绍:
https://oceanai.mit.edu/ivpman/pmwiki/pmwiki.php?n=IvPTools.Cover


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









