







数据介绍
中科院地理所匡文慧副研究员发布:全球城市建成区范围及建成区内不透水面和绿地数据集(2000、2010、2020)
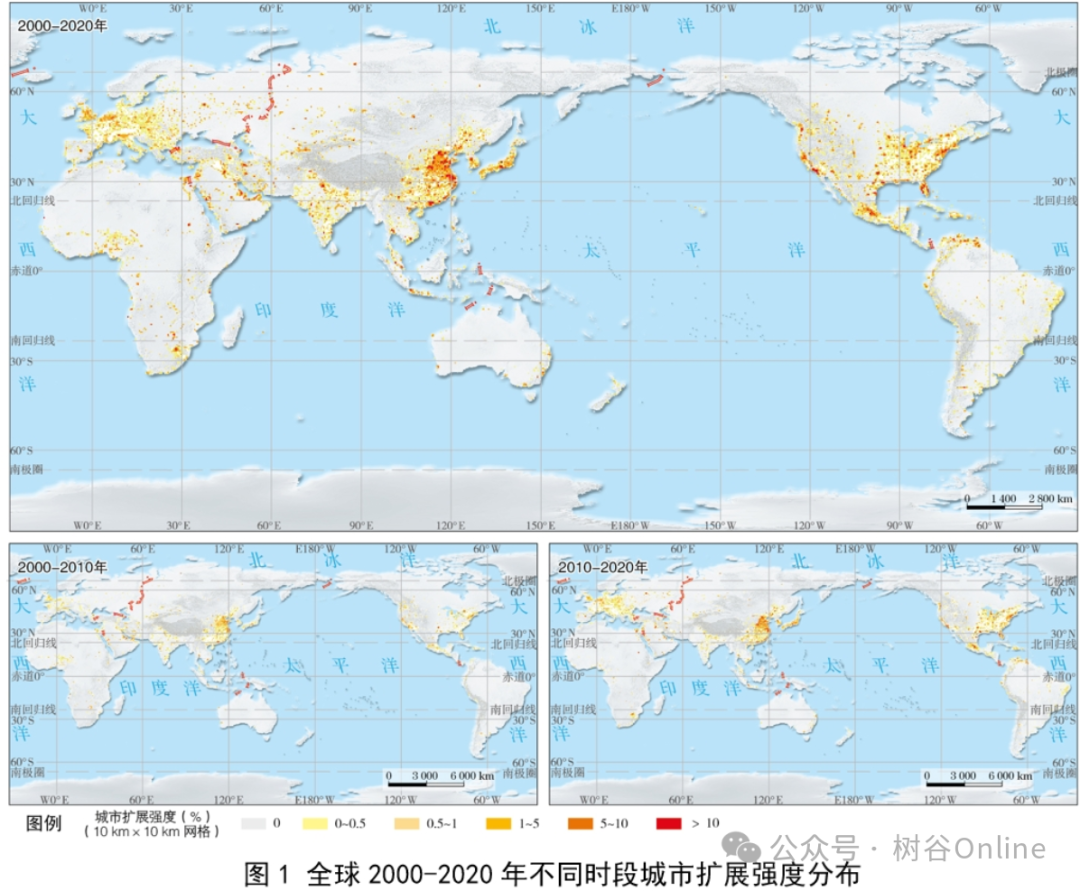
为了精准客观地刻画人类城乡建设活动下垫面状况,实现全球城市扩展与土地覆盖变化的遥感监测,作者构建了等级尺度的城市下垫面结构组分制图原理与方法,以Landsat TM/ETM+ /OLI为主要数据源,辅以HJ-1A/B、GF、ZY-3、DMSP/OLS、NPP/VIIRS等数据,应用Google Earth Engine平台和机器学习方法,研发了2000年、2010年和2020年十年尺度全球城市建成区范围及建成区内不透水面和绿地数据集,并利用高分辨率遥感影像对数据精度进行了抽样评估。结果表明,全球城市边界制图精度均值为91.20%;城市不透水面制图验证的相关系数(R)和均方根误差(RMSE)均值分别为0.92和13%;城市绿地空间制图的R和RMSE均值分别为0.91和13%。本数据集内容包括2000、2010和2020年三个年度全球分大洲的以下数据:(1)建成区范围数据;(2)建成区内不透水面分布数据;(3)建成区内绿地分布数据。数据集空间分辨率为250 mx250 m,数据存储格式为.tif和.txt,数据集由55个数据文件组成,数据量为3.25 GB(压缩为1个文件,72.8 MB)。基于该数据集的研究成果发表在《Science Bulletin》2021年第66卷第4期。
参考文献:
[1] Kuang, W. H. Mapping global impervious surface area and green space within urban environments [J]. Science China Earth Sciences, 2019, 62(10): 1591-1606.
[2] Kuang, W. H. 70 years of urban expansion across china: trajectory, pattern, and national policies [J]. Science Bulletin, 2020, 65(23): 1970-1974.
[3] Kuang, W. H., Liu, J. Y., Zhang, Z. X., et al. Spatiotemporal dynamics of impervious surface areas across china during the early 21st century [J]. Chinese Science Bulletin, 2013, 58(14): 1691-1701.
[4] Kuang, W. H., Zhang, S., Li, X. Y., et al. A 30 m resolution dataset of China’s urban impervious surface area and green space, 2000–2018 [J]. Earth System Science Data, 2021, 13(1): 63-82.
相关信息
数据格式:TIF
数据容量:3.25G
数据时间范围:2000年、2010年、2020年
数据作者:匡文慧,窦银银,陆灯盛,杜国明
中国科学院地理科学与资源研究所,北京100101

关注"树谷Online",后台回复关键字“20250114”,查看数据下载方法!

















 8865
8865

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









