







这段时间要做图像识别,首先肯定逃不过图像的边缘检测,这是基础。
边缘检测算法有很多,但是综合比较来看,canny算子的效果最好,所以这边就写一下opencv中cvcanny函数怎么使用,以及它的源码分析。
详细的步骤以及参数含义见这个博客 http://blog.csdn.net/poem_qianmo/article/details/25560901
这边我简单地写一下:
1、用高斯滤波器平滑图像(注意:cvCanny函数里面并没有这一步,所以使用之前要加上blur)。
2、用sobel算子来计算两个方向的梯度幅值。
3、对梯度幅值进行非极大值抑制 。
4、用双阈值算法检测和连接边缘。
下面是源代码:
void cvCanny( const CvArr* image, CvArr* edges, double threshold1,
double threshold2, int aperture_size )
{
cv::Mat src = cv::cvarrToMat(image), dst = cv::cvarrToMat(edges);
CV_Assert( src.size == dst.size && src.depth() == CV_8U && dst.type() == CV_8U );
cv::Canny(src, dst, threshold1, threshold2, aperture_size & 255,
(aperture_size & CV_CANNY_L2_GRADIENT) != 0);
}
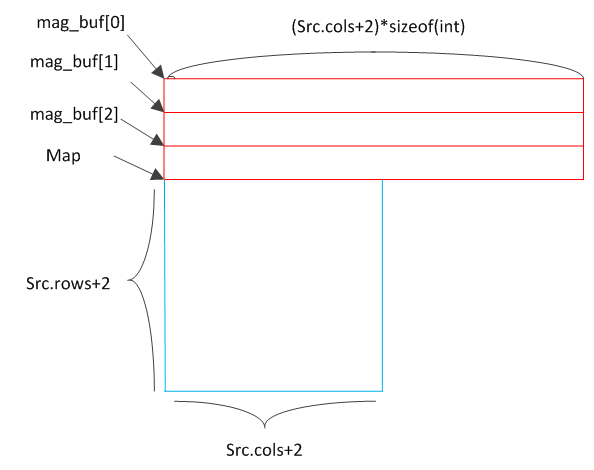
这边先放一张程序中ring buffer的结构图,帮助更好地理解
#include "precomp.hpp"
void cv::Canny( InputArray _src, OutputArray _dst,//InputArray是引用类型
double low_thresh, double high_thresh,
int aperture_size, bool L2gradient )
{
Mat src = _src.getMat();//转换成mat形式处理
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









