







第十九届中国国际工业博览会于2017年11月7-11日在国家会展中心(上海)隆重举办。作为国内规模最大,规格最高的装备制造业展会,本届工博会备受瞩目。机器人作为9个专业展区之一,展现出了工业革命和科技革命的重大成果,值得我们深入探讨一番。
在诸多的机器人主流品牌中,配天机器人的离线编程方式引人注目。配天机器人使用的是RobotArt离线编程软件,根据几何数模的拓扑信息生成机器人运动轨迹,通过逼真形象的轨迹仿真减少真机运行的失误操作,可优化机器人的运动路径,最后后置程序代码,将程序导入到示教器中实现真机运行。
RobotArt作为国内首款商业化离线编程软件,如今已与多家机器人厂商有了亲密的合作。据调查统计,RobotArt的合作伙伴有ABB、KUKA、STEP、ESTUN、AE等,还与北航等高校科研机构有深入交流。
RobotArt之所以能够被机器人厂家们青睐,其中一大优势便在于它方便的工作流程。
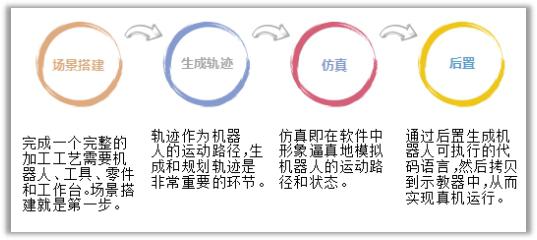
RobotArt 生成工艺的流程包括四个步骤:场景搭建、生成轨迹、仿真和后置。
1. 场景搭建
1.1 导入模型
位置:位于【机器人编程】下的【场景搭建】中。

图示:“场景搭建”位置
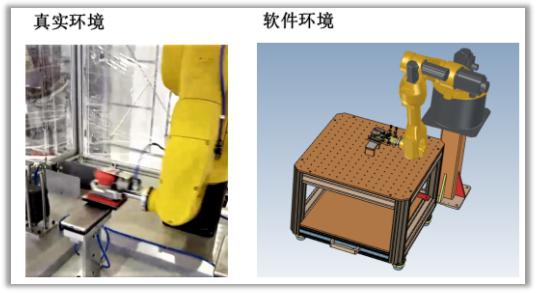
说明:完成一个完整的加工工艺需要机器人、工具、零件和工作台。在正式规划机器人运动路径之前,需先进行场景搭建。
【选择机器人】【导入零件】【导入工具】【导入底座】用来分别导入机器人、零件、工具和底座。
- 输入:支持多种格式的文件导入到RobotArt环境中。目前支持的格式包括:
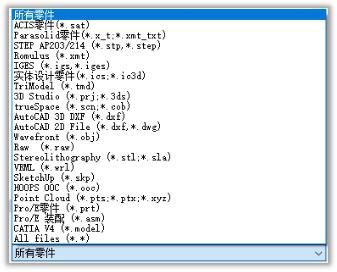
图示:RobotArt支持的模型格式
通过【输入】导入的模型需要进行定义后才能在RobotArt中使用。RobotArt支持多轴机器人、工具、零件和底座的自定义。
- 导入零件:导入机器人要加工的零件(零件库中的/自定义的)。零件的格式为robp。
- 导入工具:导入机器人工作需要的工具(工具库中的/自定义的),导入工具之前,必须先导入机器人,否则会弹出警告。工具的格式为robt。
- 导入底座:导入机器人的底座(底座库中的/自定义的)。底座的格式为robs。
- 选择机器人:用于导入官方提供的机器人或用户自定义的机器人。
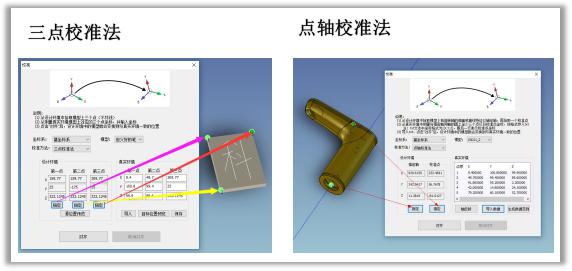
1.2 工件校准
位置:位于【机器人编程】下的【工具】中。
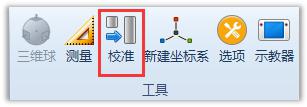
图示:“校准”位置
说明:“工件校准”用来确保软件设计环境中机器人与零件/外部工具的相对位置与真实环境中两者的相对位置保持一致。
校准方法有两种:三点校准法和点轴校准法。
2. 生成轨迹
轨迹决定了机器人的运动路径和状态,生成轨迹之后,为了达到更好的效果,可能还需要对其进行编辑。
2.1 轨迹生成
位置:位于【机器人编程】下的【基础编程】中。
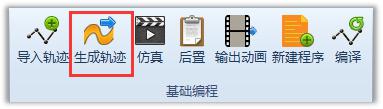
图示:“生成轨迹”位置
说明:RobotArt支持7种轨迹类型。
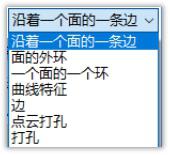
图示:7种轨迹生成方式
2.2 轨迹编辑
位置:位于所选轨迹的右键菜单内。
说明:目前RobotArt支持的轨迹编辑方法有多种,如轨迹优化、轨迹旋转、轨迹平移和Z轴固定等。用户可通过多种方法优化轨迹姿态,解决可能出现的轨迹点轴超限等问题。
3. 仿真
位置:位于【机器人编程】下的【基础编程】中。
说明:仿真即形象逼真地模拟机器人在真实环境中的运动路径和状态,查看机器人是否以正确的姿态工作。

图示:“仿真”位置
仿真管理面板如下图:
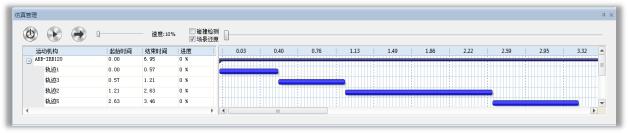
图示:仿真管理面板
- 按钮作用
:关闭仿真管理面板;
:开始仿真和暂停仿真;
:循环仿真。
- 仿真速度
通过拖动滑块来控制仿真时的速度。百分比越大,速度越快。
- 碰撞检测
碰撞检测:对装配体各零部件、各相对运动部分进行实际仿真,并在发生碰撞时发出警示声,碰撞部分以暗红色高亮显示,如图所示,可以检查机构在运动状态下是否发生碰撞。


图示:碰撞检测
- 场景还原
场景还原:结束仿真后,机器人会回到轨迹的起始点位置。
- 轨迹仿真情况
所有相关运动机构均通过动态的时间轴依次罗列、形象直观地显示出来,方便用户查看机器人、工件等轨迹的运行时间和进度。
4. 后置
位置:位于【机器人编程】下的【基础编程】中。

图示:“后置”位置
说明:“后置”功能将在软件中生成的轨迹、坐标系等一系列信息生成机器人可执行的代码语言,可以拷贝到示教器控制真机运行。
单击基础编程中的【后置】,弹出“后置处理”的对话框:

图示:后置处理界面
点击【生成文件】后,弹出后置代码编辑器,生成的代码如下:
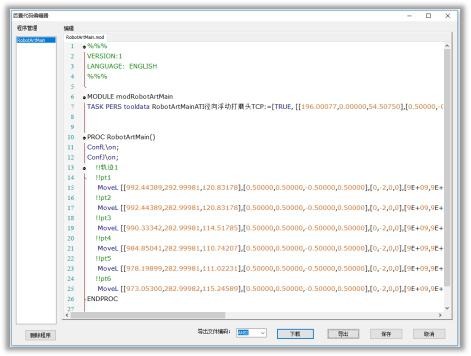
图示:后置代码编辑器
点击“导出”,导出程序到U盘中,即可进行真机操作,机器人完成加工工艺过程。















 7691
7691











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









