







【知识点】
□ 在RobotArt离线编程模拟活塞去毛刺、打磨以及抛光的工作流程
□ 机器人I/O口的设置匹配
【技能点】
□ 部署机器人去毛刺、打磨、抛光虚拟环境
□ 设计机器人对活塞加工处理的轨迹
□ 设计外部设备轨迹
□ 机器人仿真测试去毛刺、打磨、抛光轨迹
□ 真实机器人中调试运行去毛刺、打磨、抛光轨迹代码
任务1 构建活塞加工处理机器人工作站
【任务描述】
根据实际工作站,在RobotArt软件中通过导入需要的三维模型,塔建虚拟工作站环境,并通过仿真实现机器人对活塞的打磨、去毛刺以及抛光的任务。

图2-1 真实环境工作站
【任务实施】
1、 打开活塞装配阶段2原始文件,如图:

任务2 设计去毛刺、打磨、抛光机器人工作轨迹
【任务描述】
轨迹设计生成机器人工作轨迹流程,首先机器人从home点来抓取1中的夹爪工具,然后再用安装后的夹爪工具来抓取位置2中的活塞,抓取完活塞后机器人来到位置3然后分别用去毛刺工具4、打磨工具5、抛光工具6对该活塞进行去毛刺、打磨以及抛光的加工处理,活塞处理完成后放到中转工装夹具7上,然后机器人再次回到图中的位置,将夹爪工具放回到位置1处。

【任务实施】
1、轨迹生成
(一) 生成路径1:
路径1主要是给机器人添加home点以及生成夹爪工具安装在机器人下面的机械快换上的抓取点。
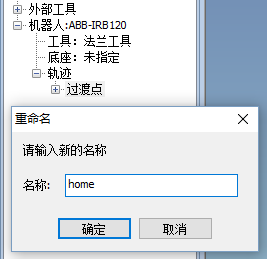
(1)右击机器人下的“机械快换”选择“插入pos点”命令,如图:


插入pos点后会在左侧的“机器人加工管理树”上多了一个“过渡点”,我们右击该“过渡点”将它重名为“home”,如图:
(2)机器人抓取“夹爪工具”。
右击“夹爪工具”选择“装配工具”命令,如图:

装配工具后会弹出一个输入出入刀偏移量的输入框,我们在该输入框中输入相应的偏移量数值,如图:

输入相应的偏移量后,机器人会自动寻找这个“夹爪工具”并把它安装到自己的机械快换上,同时会生成一个竖直方向运行的趋近点以及离开点,如图:
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 3086
3086











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









