







转自:http://blog.csdn.net/cv_ronny/article/details/17416033
我们在实际应用中对图像进行的操作,往往并不是将图像作为一个整体进行操作,而是对图像中的所有点或特殊点进行运算,所以遍历图像就显得很重要,如何高效的遍历图像是一个很值得探讨的问题。
一、遍历图像的4种方式:at<typename>(i,j)
Mat类提供了一个at的方法用于取得图像上的点,它是一个模板函数,可以取到任何类型的图像上的点。下面我们通过一个图像处理中的实际来说明它的用法。
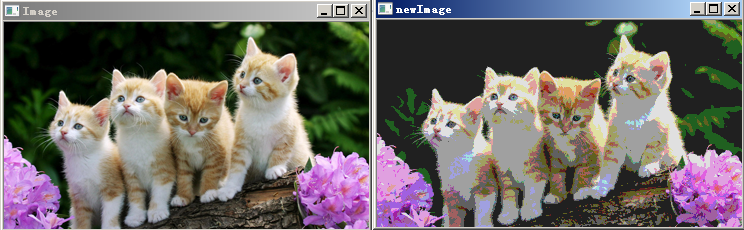
在实际应用中,我们很多时候需要对图像降色彩,因为256*256*256实在太多了,在图像颜色聚类或彩色直方图时,我们需要用一些代表性的颜色代替丰富的色彩空间,我们的思路是将每个通道的256种颜色用64种代替,即将原来256种颜色划分64个颜色段,每个颜色段取中间的颜色值作为代表色。
通过上面的例子我们可以看出,at方法取图像中的点的用法:
image.at<uchar>(i,j):取出灰度图像中i行j列的点。
image.at<Vec3b>(i,j)[k]:取出彩色图像中i行j列第k通道的颜色点。其中uchar,Vec3b都是图像像素值的类型,不要对Vec3b这种类型感觉害怕,其实在core里它是通过typedef Vec<T,N>来定义的,N代表元素的个数,T代表类型。
更简单一些的方法:OpenCV定义了一个Mat的模板子类为Mat_,它重载了operator()让我们可以更方便的取图像上的点。
Mat_<uchar> im=image;
im(i,j)=im(i,j)/div*div+div/2;
二、高效一点:用指针来遍历图像
上面的例程中可以看到,我们实际喜欢把原图传进函数内,但是在函数内我们对原图像进行了修改,而将原图作为一个结果输出,很多时候我们需要保留原图,这样我们需要一个原图的副本。
从上面的例子中可以看出,取出图像中第i行数据的指针:image.ptr<uchar>(i)。
值得说明的是:程序中将三通道的数据转换为1通道,在建立在每一行数据元素之间在内存里是连续存储的,每个像素三通道像素按顺序存储。也就是一幅图像数据最开始的三个值,是最左上角的那像素的三个通道的值。
但是这种用法不能用在行与行之间,因为图像在OpenCV里的存储机制问题,行与行之间可能有空白单元。这些空白单元对图像来说是没有意思的,只是为了在某些架构上能够更有效率,比如intel MMX可以更有效的处理那种个数是4或8倍数的行。但是我们可以申明一个连续的空间来存储图像,这个话题引入下面最为高效的遍历图像的机制。
三、更高效的方法
上面已经提到过了,一般来说图像行与行之间往往存储是不连续的,但是有些图像可以是连续的,Mat提供了一个检测图像是否连续的函数isContinuous()。当图像连通时,我们就可以把图像完全展开,看成是一行。
用指针除了用上面的方法外,还可以用指针来索引固定位置的像素:
image.step返回图像一行像素元素的个数(包括空白元素),image.elemSize()返回一个图像像素的大小。
image.at<uchar>(i,j)=image.data+i*image.step+j*image.elemSize();
四、还有吗?用迭代器来遍历。
下面的方法可以让我们来为图像中的像素声明一个迭代器:
MatIterator_<Vec3b> it;
Mat_<Vec3b>::iterator it;
如果迭代器指向一个const图像,则可以用下面的声明:
MatConstIterator<Vec3b> it; 或者
Mat_<Vec3b>::const_iterator it;
下面我们用迭代器来简化上面的colorReduce程序:
如果你想从第二行开始,则可以从image.begin<Vec3b>()+image.rows开始。
上面4种方法中,第3种方法的效率最高!
五、图像的邻域操作
很多时候,我们对图像处理时,要考虑它的邻域,比如3*3是我们常用的,这在图像滤波、去噪中最为常见,下面我们介绍如果在一次图像遍历过程中进行邻域的运算。
下面我们进行一个简单的滤波操作,滤波算子为[0 –1 0;-1 5 –1;0 –1 0]。
它可以让图像变得尖锐,而边缘更加突出。核心公式即:sharp(i.j)=5*image(i,j)-image(i-1,j)-image(i+1,j
)-image(i,j-1)-image(i,j+1)。

上面的程序有以下几点需要说明:
1,staturate_cast<typename>是一个类型转换函数,程序里是为了确保运算结果还在uchar范围内。
2,row和col方法返回图像中的某些行或列,返回值是一个Mat。
3,setTo方法将Mat对像中的点设置为一个值,Scalar(n)为一个灰度值,Scalar(a,b,c)为一个彩色值。
六、图像的算术运算
Mat类把很多算数操作符都进行了重载,让它们来符合矩阵的一些运算,如果+、-、点乘等。
下面我们来看看用位操作和基本算术运算来完成本文中的colorReduce程序,它更简单,更高效。
将256种灰度阶降到64位其实是抛弃了二进制最后面的4位,所以我们可以用位操作来做这一步处理。
首先我们计算2^8降到2^n中的n:int n=static_cast<int>(log(static_cast<double>(div))/log(2.0));
然后可以得到mask,mask=0xFF<<n;
用下面简直的语句就可以得到我们想要的结果:
result=(image&Scalar(mask,mask,mask))+Scalar(div/2,div/2,div/2);
很多时候我们需要对图像的一个通信单独进行操作,比如在HSV色彩模式下,我们就经常把3个通道分开考虑。
<span style="color: rgb(43, 145, 175);">vector</span><span style="color: black;"><</span><span style="color: rgb(43, 145, 175);">Mat</span><span style="color: black;">> planes; </span><span style="color: green;">// 将image分为三个通道图像存储在planes中 </span><span style="color: black;">split(image,planes); planes[0]+=image2; </span><span style="color: green;">// 将planes中三幅图像合为一个三通道图像 </span><span style="color: black;">merge(planes,result);</span>
以下是自己的程序做的实验:
// learn_opencv2.cpp : 定义控制台应用程序的入口点。
//
#include "stdafx.h"
#include "opencv2/core/core.hpp"
#include "opencv2/highgui/highgui.hpp"
#include "iostream"
using namespace std;
void colorReduce(cv::Mat& image, int div)
{
for (int i = 0; i < image.rows; i++)
for (int j = 0; j < image.cols; j++)
{
image.at<cv::Vec3b>(i, j)[0] = image.at<cv::Vec3b>(i, j)[0] / div*div + div / 2;
image.at<cv::Vec3b>(i, j)[1] = image.at<cv::Vec3b>(i, j)[1] / div*div + div / 2;
image.at<cv::Vec3b>(i, j)[2] = image.at<cv::Vec3b>(i, j)[2] / div*div + div / 2;
//image.at<uchar>(i, j) = image.at<uchar>(i, j) / div*div + div / 2;
}
}
int main()
{
cv::Mat image(240, 320, CV_8UC3);
image = cv::imread("1.png");
colorReduce(image,64);
cv::namedWindow("hog");
cv::imshow("hog",image);
cv::waitKey(5000);
return 0;
}















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









