







完成一篇机器人领域期刊论文所需要的一些工具
最近刚刚完成论文的返修,有时间把一些经验整理一下。以IEEE-RA-L为例,论文提交需要pdf版的原文,还有一个不超过20MB的视频,视频需要附带readme.txt和summary.txt(五句话以内概括视频内容,帮助读者判断是否需要下载)。返修的时候还需要提交一个response letter (不超过12MB)。
书写工具
一般有word和Latex两种方式,之前的会议论文用的word,第一版把图都贴错了。response letter可以用word,论文的话现在还是强推Latex。Latex上手以后真的很好用。
推荐两个Latex的编辑器: winedt, texstudio.两者大差不差,我用的是后者。
此外,如果你需要和其他人共同修改一个文档的时候,除了直接邮件发送源文件以外,还可以使用overleaf,一个在写的Latex编辑网页,什么都不用安装就可以使用,非常方便。通过共享你可以指定给你的导师或者是师兄一起修改(非会员只能邮件分享给一个人)。你也可以直接分享一个通用链接,这样谁都可以编辑它。

我在和国外的导师交流过程中基本上都是自己这边编译好以后然后上传到Overleaf,他下载完之后再修改。因为Overleaf作为在线修改网页,编译很慢,所以大家可以把他当成github的存在。有两个网址: https://cn.overleaf.com/ 和 https://overleaf.com/ 前者是中文版的,后者是国际版的,两者账号通用。
Latex的公式写法很方便,但是你需要知道他的代码表达式,这个时候就推荐使用mathpix公式截取软件,你可以通过ctrl+m截取公式的图片,转而生成Latex的源码。非会员每个月有限制,我个人用qq邮箱和学校邮箱注册了两个,完全够用。
Latex中图片的排列往往让用惯word的同学头疼,这里给出了一些排版建议,从Y导师那边学到的,这里不得不感叹国外的老师治学态度之严谨,论文写作和工具应用之熟练。
首先需要注意的就是你的图片选择单栏还是双栏。一般图片是由多张图拼合而成(visio或者ppt拼起来的),这里介绍一种使用\subfigure的方式,通过Latex自带的子图模式来进行拼图。同时需要用到调整图与图之间纵向间距的\vspace和调整横向间距的\hspace,以及调整图自身的高度\height和宽度\weight。
\begin{figure*}[th!] %figure*代表跨栏图片,figure表示单栏,[th!]表示紧跟在上一段文字之后
\vspace{-2mm} %纵向间距
\hspace{-8mm} %横向间距
\subfigure[]{
\label{fig9a}
\includegraphics[width=2.66in]{fig/fig9a.pdf}} %也可以调整高度 height
\hspace{-9mm}
\subfigure[]{
\label{fig9b}
\includegraphics[width=1.65in]{fig/fig9b.pdf}}
\hspace{-3mm}
\subfigure[]{
\label{fig9c}
\includegraphics[width=1.54in]{fig/fig9c.pdf}}
\hspace{-3mm}
\subfigure[]{
\label{fig9d}
\includegraphics[width=1.63in]{fig/fig9d.pdf}}
\caption{图片标题}
\label{fig_exp_3_real}
\vspace{-0mm}
\end{figure*}
制图工具
上一节提到了论文图片的排版,这一节介绍一下制图。Latex仅支持.pdf或者.eps格式的图片(eps会在编译是转成pdf)。
PDF格式
PPT制图
PPT制图更加简单直观,但往往需要排版,比如对其,大小调整,这些固然可以在格式里面设置大小,但是效率较低,这里推荐islide插件。islide作为一款ppt制作的辅助工具可以实现简单高效的排版,让使用者将更多的精力放在图的内容和表达形式上,而不是拘泥于排版。


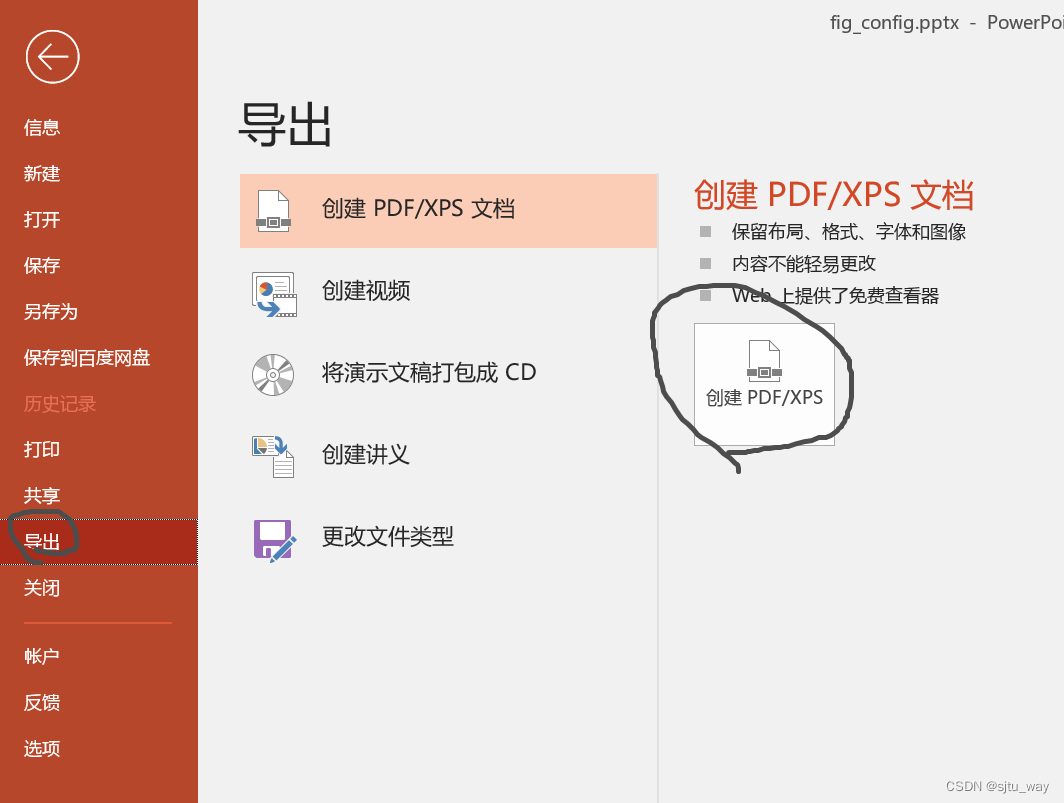
最后生成图片的时候选择: 文件->导出->创建PDF/XPS。
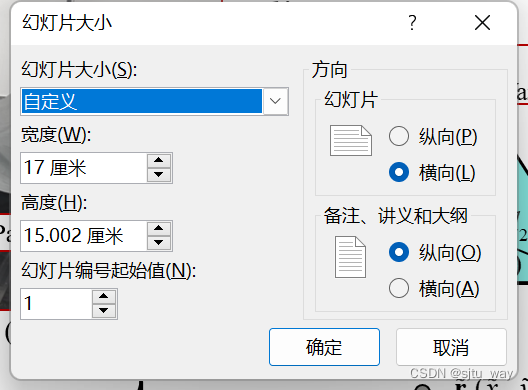
这里就会遇到一个问题,那就是我们的图和ppt原始尺寸不一致,会出现白边,影响美观。这里教给大家的解决方法是:设计->幻灯片大小->自定义幻灯片大小。修改完大小后选择 最大化。如果不知道修改的具体参数,可以首先将绘制的图片Ctrl+G组合一下,然后在图片格式里面查看图片大小,根据图片大小调整。

推荐一个好用的图标网站 阿里小图标,或者国外的图标网站flaticon
VISIO制图
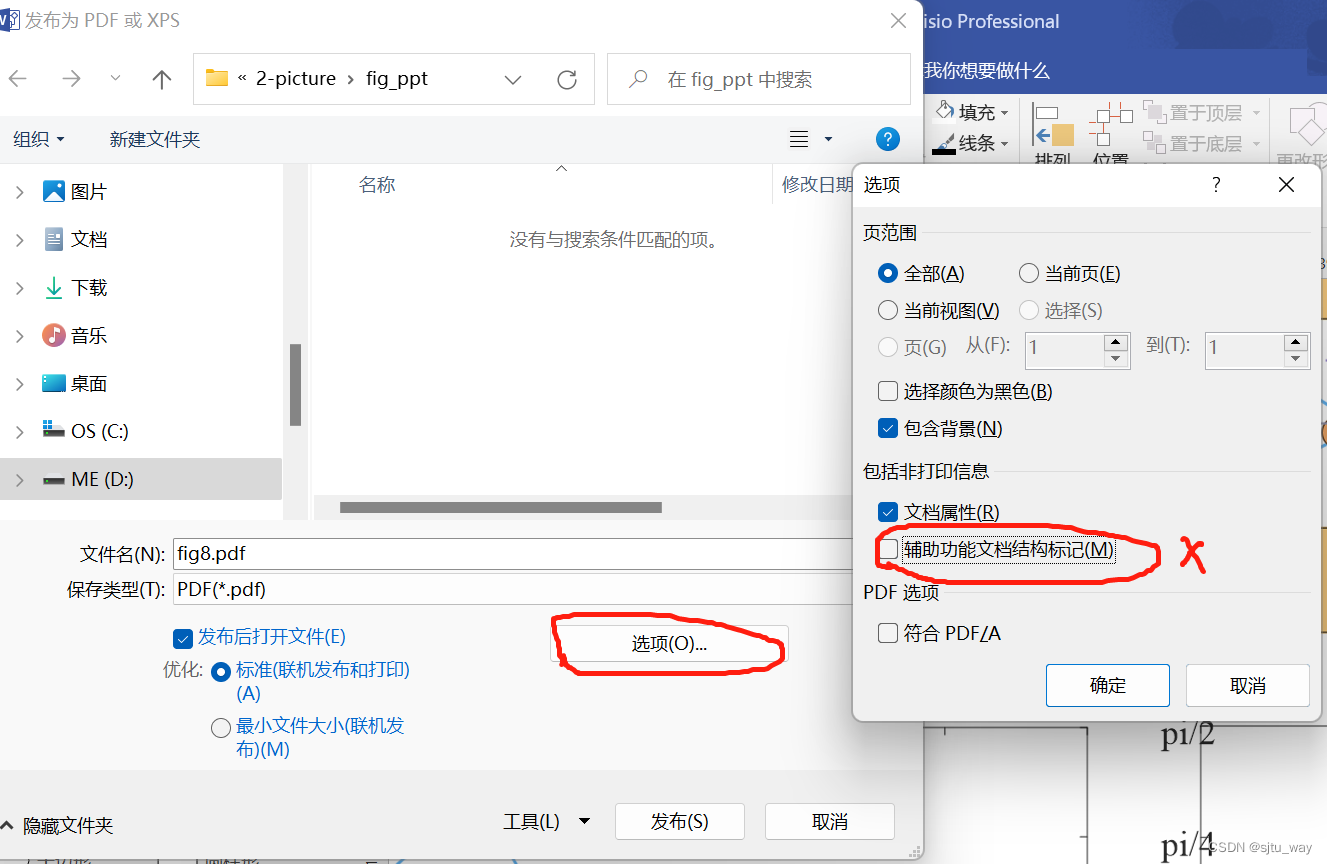
visio强大的功能不言而喻,不过出图的时候可能会有黑边框,这个时候可以文件->导出->PDF->选项->取消勾选辅助功能文档结构标记。
EPS 格式
Inkspace
eps格式可以直接在图上进行修改,甚至可以改变仿真曲线的走势,当然如果一般的数据图更建议直接matlab或者origin出图。这里推荐Adobe的AI(功能齐全但是不免费而且很占内存)和Inkspace (免费且小巧方便),具体使用方法见相关网站。
仿真工具
机器人领域的两个常用的仿真软件是MATLAB和ROS,前者用来验证底层的算法,后者用来可视化(Rviz, Gazebo)以及实时规划(Moveit)。
MATLAB
仿真工具首先就是MATLAB,一些底层的算法验证,规划路径的简单显示都可以通过MATLAB实现,这里介绍两个机器人领域可能需要用到的MATLAB技术。
路径点生成
把MABLAB的矩阵数据导入到ROS的C++语言的数组中,我这里用的是笨办法,直接输出一个.txt,然后手动复制粘贴。不过笨办法有的时候确实是好用的办法。这里展示了一段源码,他可以实现向R1x.txt的文件写入诸如 data1, data2, data3,.... 格式的数据。
fid=fopen('R1x.txt','w');
num = 487;
for i = 1:num
fprintf(fid,'%f',R1_save(i,1)); %把数据写入
fprintf(fid,'%s\t',',');
end
fclose(fid);
实时仿真动画Gif生成
这里提供了让Matlab仿真图可以动态展示的函数,使用时直接调用savefig('gif文件名')即可。
function savegif(varargin)
global iiii;
global time;
tip=0;
p=clock;
if isempty(varargin)
filename='untitledgif.gif';
else
filename=varargin{1};
if length(filename)<4
filename=[filename,'.gif'];
else
if ~strcmp(filename(end-3:end),'.gif')
filename=[filename,'.gif'];
end
end
if nargin>=2
tip=1;
end
end
if isempty(iiii)
iiii=0;
time=p(6);
else
iiii=iiii+1;
if ((p(6)>=time)*(p(6)-time)+(p(6)<time)*(p(6)+60-time))>100
iiii=0;
end
time=p(6);
end
if tip ==0
f=getframe(gca);%getframe(F)gets a frame from the current axes
else
pos=get(gcf,'position');
f=getframe(gcf,[1,1,pos(3),pos(4)]);
end
f=frame2im(f);
[f,map]=rgb2ind(f,256);
if iiii==0 || exist(filename,'file')==0
imwrite(f,map,filename,...
'delaytime',.1);
else
imwrite(f,map,filename,'writemode','append',...
'delaytime',.1);
end
ROS 仿真
Rviz仿真
Rviz作为可视化的平台功能很强大,对于planning这类不需要物理交互的仿真绰绰有余。这一部分涉及到的细节比如场景的搭建、纹理的配置、marker点的可视化,后续单独再出。
剪辑工具
俗话说的好,视频剪得好,效果会更好。一个好的video无疑能给论文加分,science robotics的视频质量谁看都觉得很赞。不过学术的视频不需要那么多的花里胡哨,把内容表达清楚,数据呈现清晰是最重要的,因此剪辑很关键。
录屏软件 Obs Studio
首先仿真的视频源于录制,这里推荐obsstudio, 可以在ubuntu系统下录屏。
格式转换
视频提交需要不超过20MB,所以格式转换是必要的,格式转换软件推荐格式工厂, 一句话 格式工厂牛x~
Pr
Pr是我一直使用的软件,包括给师弟的AIM,师兄的TMECH制作时都用到了它,它时间轴清晰,功能强大,但是太占用内存了,感觉杀鸡用牛刀。直到疫情导致实验室工作室不开放,只能在寝室用8GB内存的小新轻薄本,这个时候我找到了神器 剪映。
剪映
剪映是抖音旗下的官方视频剪辑软件,桌面版和移动版都有,桌面版更是免费、小巧、基本功能全面、操作十分简单,完全可以替代Pr,不得不说抖音的生态链打造的还是牛牛的。
以上是个人的一些经验分享,对论文大牛来说可能都是一些很简单的常识,不过对于初学者来说,入门有的时候真的需要方法论,自己摸索虽然会有顿悟的快乐,但是缺耗费了大量的时间。最后希望大家都能为机器人领域多做贡献~



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











