










 本文介绍了如何在基于BA的结构化从运动(SFM)中利用地面控制点(GCP)提高地图准确性。通过人工打点获取GCP的三维地理坐标,并将其与图像上的二维坐标对应,然后使用Ceres优化重投影误差,调整模型位置。通过增加GCP的权重,优化过程中着重考虑控制点的误差,从而实现模型的精确调整。实验显示,增大权重能显著提高优化效果,甚至未打点的图像也得到了校正。
本文介绍了如何在基于BA的结构化从运动(SFM)中利用地面控制点(GCP)提高地图准确性。通过人工打点获取GCP的三维地理坐标,并将其与图像上的二维坐标对应,然后使用Ceres优化重投影误差,调整模型位置。通过增加GCP的权重,优化过程中着重考虑控制点的误差,从而实现模型的精确调整。实验显示,增大权重能显著提高优化效果,甚至未打点的图像也得到了校正。
现有,基于BA的SFM过程,在基于image_0位置(0,0,0)完成相对位置建图incremental mapping后,通过图片对应GPS信息,通过similarity3将整个地图拉到一个相对准确的位置,在此之后不再进行BA优化(只改变了整个模型的绝对位置,pose与point的相对位置并没有发生变化,原则上不需要)。
现在为了让模型更准确,加入控制点功能。
1.人工使用定位设备对选定位置进行打点,获得一个预设位置的绝对地理坐标Ground Truth。
2.通过在image上找到打点位置,手动对图片打标签,实现多张image下的三维-二维映射关系
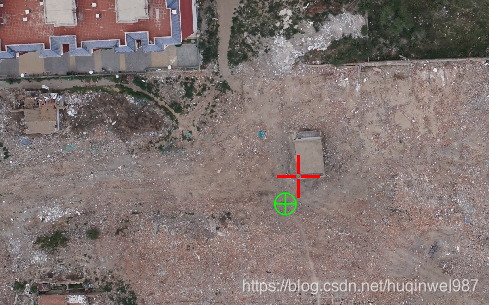
如图:绿色为先验控制点投影在模型图片中的坐标,红色为人为手工纠正的点。(图片仅供参考,只要能得到控制点数据结构就行了)
控制点数据结构:先验三维坐标-image_id/name-先验二维坐标
(细节:打点坐标为WGS84,需要转换为XYZ坐标)

3.将模型针对控制点进行匹配调整:将控制点的先验xyz投影到每张image上,用二维投影坐标减去二维先验坐标,得到投影误差,使用ceres优化这个重投影误差,实现模型位置的精确调整。
优化方程:
延续BA+ceres的方法,整个模型也都要同步优化,但是重点优化GCP的重投影误差,减少对已经建好的模型进行干扰,所以给GCP加一个更大的权重(在此之前,GCP的重投影误差和3d点的冲拖影误差,两者误差是同数量级的,不需要额外做处理),所有数据放在一起进行BA。
//固化相机内外参、固化二维控制点与三维控制点,优化相机位姿与3d点位置
F(x)=(3d点-2d特征点重投影误差)+(GCP重投影误差)*weight
ceres优化机制:
F(x)=1/2(f1(x)+f2(x)+f3(x)),各项残差同等优化,所以需要自己权衡每一项的数值量级,实测如果weight是1,优化也能达到一些效果,但是不够显著,或者优化速度过慢,考虑到已有3d点没必要被优化,将weight从1逐渐提高到20,提高到500,以提升控制点的优化效果。
(对应原理,将3像素误差优化到终止条件(比如1),和把1500优化到终止条件是不一样的,如果最终误差是1,缩放回原尺寸看,就是1比0.002,差距明显)
weight=1

weight=20
weight=500

最终优化效果:



甚至没打点的图片也被纠正了



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









