






一阶倒立摆的ts模糊控制,基于ts模糊模型搭建,在matla b simulink环境下仿真效果良好。
可外接扰动信号,可做离散控制系统的,也可做连续系统的。
YID:77188649772535589
好的0413
一阶倒立摆是一个经典的控制系统问题,在工程领域中广泛应用。本文将围绕一阶倒立摆的TS(Type-2 Sugeno)模糊控制展开讨论,并基于TS模糊模型在MATLAB Simulink环境下进行仿真,以评估其控制效果。
TS模糊控制是一种在Sugeno模糊系统的基础上进行扩展的模糊控制方法。与传统的模糊控制方法相比,TS模糊控制具有更强的表示能力和更好的性能。TS模糊模型可以将模糊控制系统中的不确定性和模糊性进行更精确的建模,从而提高控制系统的稳定性和鲁棒性。
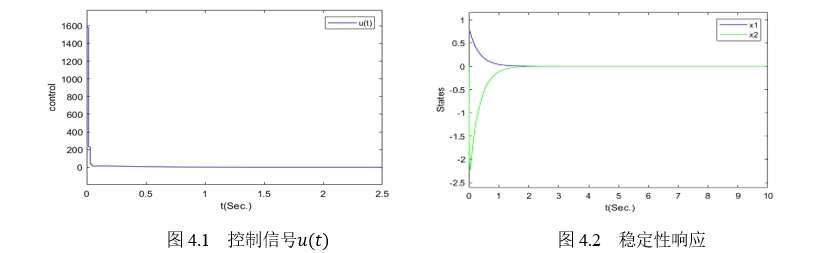
在本文中,我们首先介绍一阶倒立摆系统的基本原理和数学模型。倒立摆系统是一个经典的非线性系统,其目标是通过对倒立摆杆进行控制,使其保持竖直位置。然后,我们将详细介绍TS模糊控制的原理和方法。TS模糊模型由模糊规则和模糊集合构成,可以对系统的输入和输出进行模糊化处理,并通过模糊规则将模糊输入映射到模糊输出。我们将基于TS模糊模型搭建一阶倒立摆的控制系统,并使用MATLAB Simulink进行仿真。通过对系统的控制效果进行评估,我们可以验证TS模糊控制在一阶倒立摆系统中的有效性和性能。
在仿真实验中,我们将引入外部扰动信号,以测试系统对扰动的抗干扰能力。同时,我们还将探讨TS模糊控制在离散控制系统和连续控制系统中的应用。离散控制系统是指系统的输入和输出都是离散的,而连续控制系统是指系统的输入和输出都是连续的。通过比较两种控制系统的仿真结果,我们可以分析TS模糊控制在不同控制系统中的适应性和性能差异。
本文的结构安排如下:首先介绍一阶倒立摆系统的基本原理和数学模型;然后详细介绍TS模糊控制的原理和方法;接着基于TS模糊模型搭建一阶倒立摆的控制系统,并进行MATLAB Simulink仿真;最后对仿真结果进行分析和讨论,并总结本文的主要内容和结论。
通过本文的研究,我们可以得出以下结论:TS模糊控制在一阶倒立摆系统中具有良好的控制效果和抗干扰能力;TS模糊控制在离散控制系统和连续控制系统中都能得到应用;TS模糊控制在控制系统中的性能优于传统的模糊控制方法。
综上所述,本文通过对一阶倒立摆系统的TS模糊控制进行研究和仿真,验证了TS模糊控制在控制系统中的有效性和性能优势。本文的研究结果对于控制系统的设计和优化具有一定的指导意义,并为TS模糊控制在工程领域的应用提供了一定的参考。希望本文的研究能够对相关领域的学者和工程师们有所启发,并促进TS模糊控制在实际工程中的进一步应用和发展。
以上相关代码,程序地址:http://wekup.cn/649772535589.html















 7799
7799











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









